构建一个基于C++的、融合传统方法与AI的ISP质量评估与优化系统(十五-2)
-
-
- [🛠️ 第一步:工具准备与RAW数据感知](#🛠️ 第一步:工具准备与RAW数据感知)
- [💻 第二步:搭建C++ ISP基础管道](#💻 第二步:搭建C++ ISP基础管道)
- [🔬 第三步:学习资源与深化理解](#🔬 第三步:学习资源与深化理解)
- [🔍 调试与验证技巧](#🔍 调试与验证技巧)
- [🚀 进阶指导(为下一阶段做准备)](#🚀 进阶指导(为下一阶段做准备))
-
先声明:本篇文章有沙盘预研性质,如有不适,请先拿到收藏夹吃灰。本文设计了一个三阶段实战项目方案 。这个方案的核心是构建一个基于C++的、融合传统方法与AI的ISP质量评估与优化系统,串联起显示端和采集端知识。
🛠️ 第一步:工具准备与RAW数据感知
这一步的目标是直观感受RAW数据,理解其后端算法处理的起点。
-
获取RawDigger并分析RAW图
-
行动 :从官方或可信渠道下载 RawDigger 。安装后,前往 MIT-Adobe FiveK数据集 的官方页面或 Google Raw Dataset 搜索下载
.DNG或.CR2格式的原始图像文件。 -
关键操作:
-
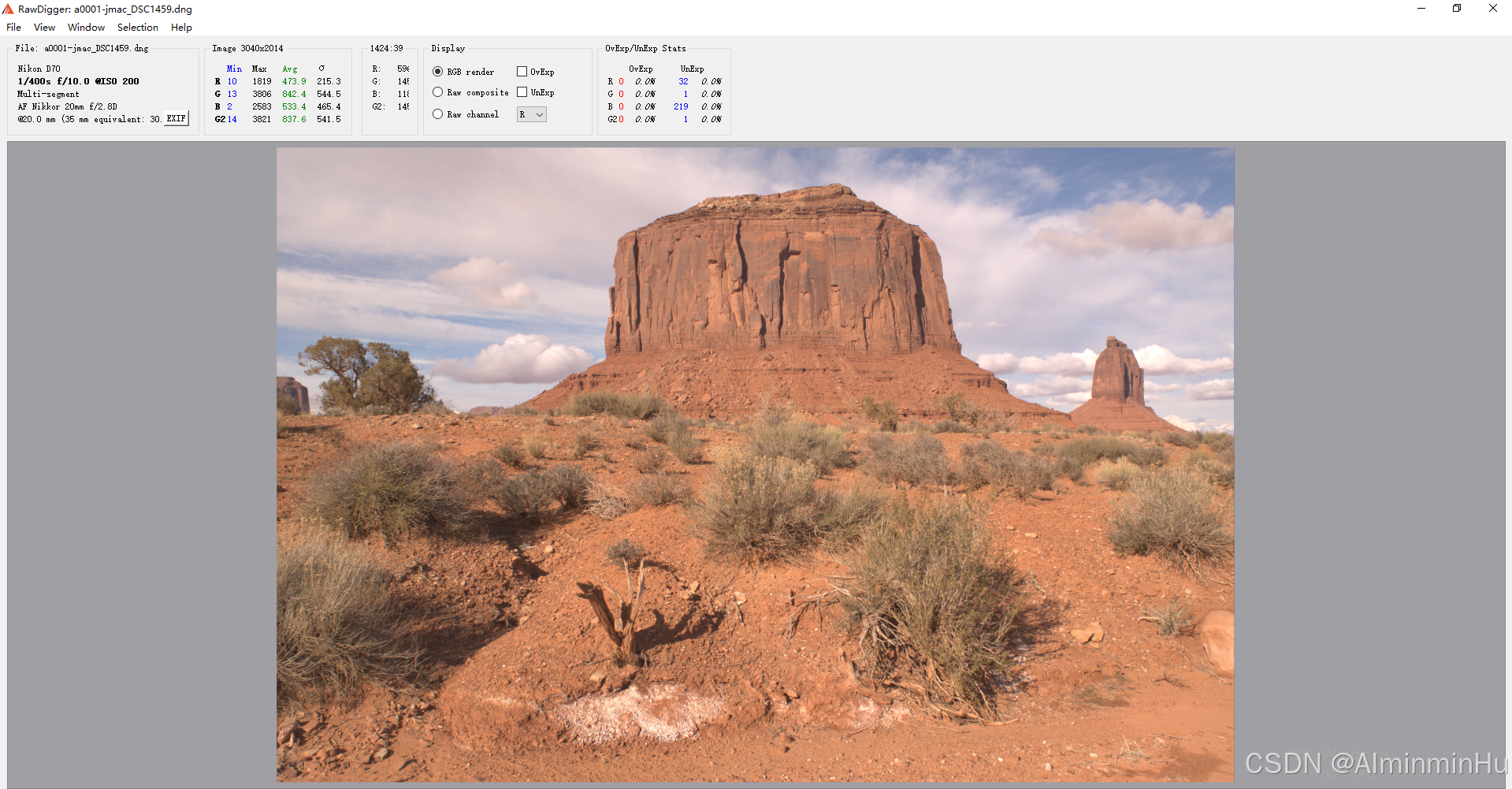
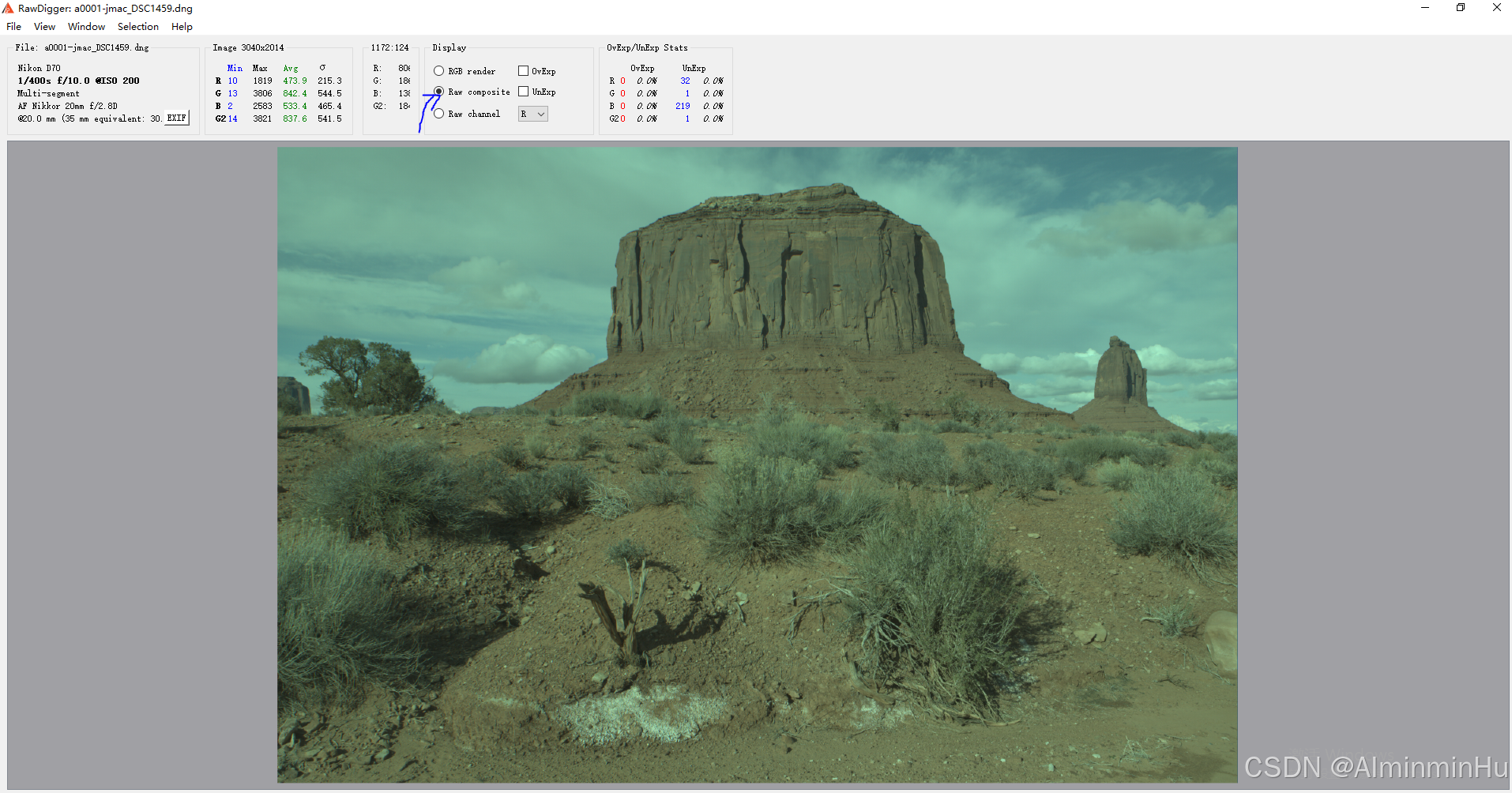
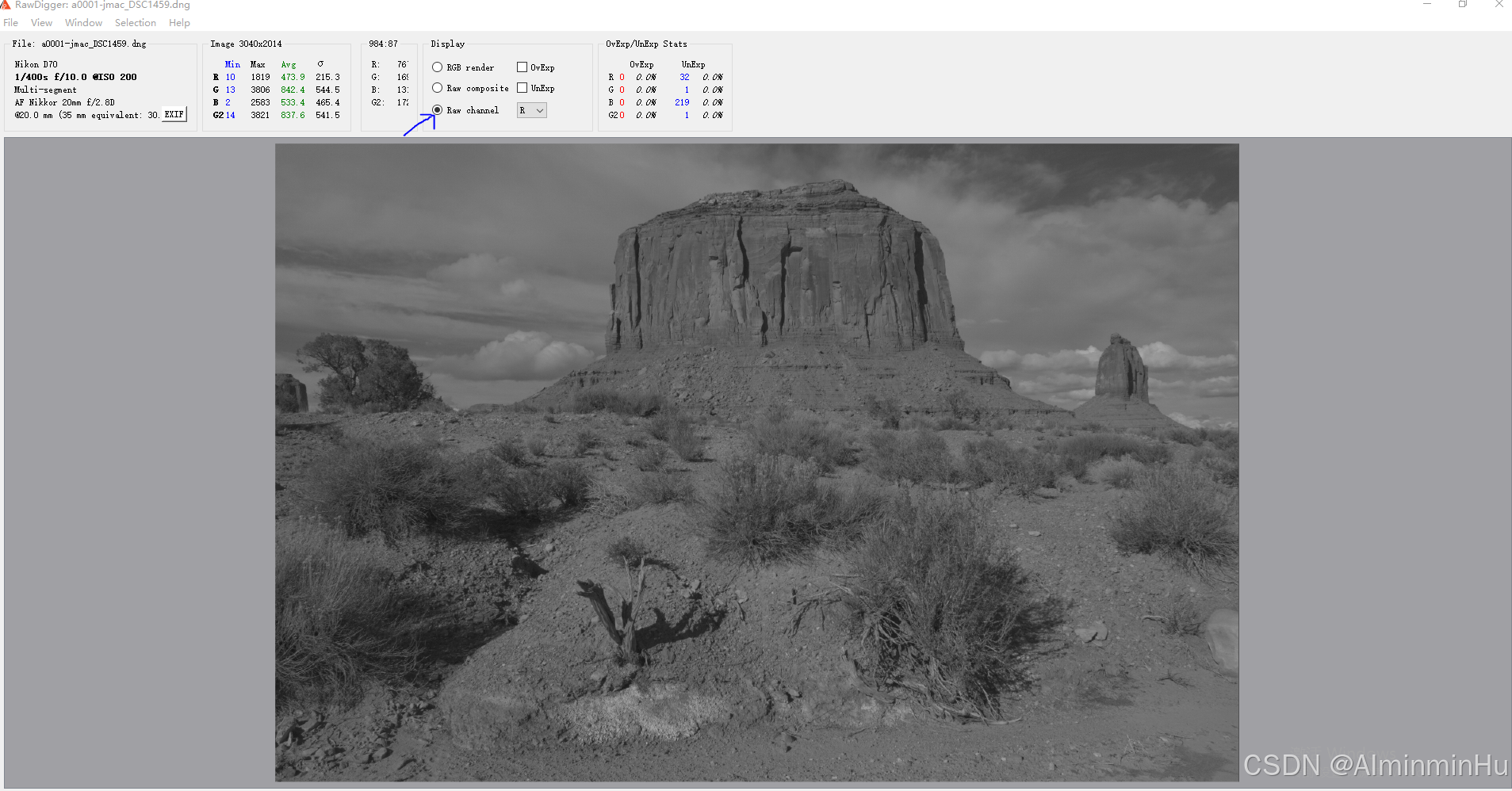
用RawDigger打开文件,将查看模式切换到 "Raw Composite" 或 "Raw Channel" 。会看到图像是暗绿色的马赛克图,这正是Bayer阵列的原始面貌。如下:
-
观察直方图 :你会发现直方图集中在左侧暗部,这是因为数据中包含了黑电平(Black Level)。在RawDigger中查看文件元数据,通常会直接标出黑电平值,记录下来备用。
-
分析像素:框选图像中应该是纯黑色的区域(如镜头盖覆盖的区域),查看RawDigger显示的像素值,这可以帮助你验证黑电平。
-
-
-
理解RAW格式(为后续编程打基础)
- 核心概念 :RAW数据是传感器最原始的记录。您需要关注图像的位深 (如12bit、14bit)、Bayer阵列模式 (如RGGB、BGGR)以及它是Plain RAW 还是MIPI RAW。这些信息通常在传感器数据手册或RawDigger的元数据中能找到,是正确读取RAW文件的前提。
💻 第二步:搭建C++ ISP基础管道
这是核心环节。我们将基于 OpenCV 和参考开源项目,构建一个最小可工作的ISP管道。
-
环境搭建
- IDE :Visual Studio 2022(社区版免费)是Windows下最省心的选择。
- 库 :使用 vcpkg 包管理器安装OpenCV,它能自动处理依赖。安装后,在VS项目中配置包含目录和库目录即可。
- 开源项目参考 :强烈建议您将 ISP-pipeline-hdrplus 或 HDR-ISP 项目克隆到本地。这些项目提供了完整的、可编译的C++ ISP管道,是极佳的学习模板和代码参考。
-
项目实战:从RAW到sRGB
下面是一个更完整、可编译的代码框架,请注意,由于RAW读取的复杂性,这里我们假设已经从文件读取了一个正确的
cv::Mat raw_data。cpp#include <opencv2/opencv.hpp> #include <iostream> int main() { // --- 步骤0: 读取RAW数据(此处需要您根据具体文件格式实现)--- // 例如,使用libraw库或自己解析.raw二进制文件。 // cv::Mat raw_data = readRawFile("input.raw", height, width, CV_16U); // 假设我们已经有了一个16位的单通道Bayer图像 raw_data // --- 步骤1: 黑电平校正(BLC)--- uint16_t black_level = 512; // 这个值需要根据你的传感器或RawDigger分析确定 cv::Mat corrected_data; // 避免下溢,使用饱和运算 corrected_data = cv::max(raw_data - black_level, 0); // --- 步骤2: 自动白平衡(AWB) - 灰度世界算法--- // 分离Bayer通道 (以RGGB为例) int width = corrected_data.cols; int height = corrected_data.rows; cv::Mat r = corrected_data(cv::Rect(0, 0, width/2, height/2)); // R at (0,0) cv::Mat g1 = corrected_data(cv::Rect(1, 0, width/2, height/2)); // G at (1,0) cv::Mat g2 = corrected_data(cv::Rect(0, 1, width/2, height/2)); // G at (0,1) cv::Mat b = corrected_data(cv::Rect(1, 1, width/2, height/2)); // B at (1,1) // 计算各通道均值 double r_mean = cv::mean(r)[0]; double g_mean = (cv::mean(g1)[0] + cv::mean(g2)[0]) / 2.0; double b_mean = cv::mean(b)[0]; // 计算增益(以绿色通道为基准) double gain_r = g_mean / r_mean; double gain_b = g_mean / b_mean; double gain_g = 1.0; // 绿色通道增益通常为1.0 // 应用增益(注意:这里操作的是分离后的通道矩阵) r = r * gain_r; b = b * gain_b; // g1, g2 保持不变 // 将处理后的通道重新放回corrected_data中 r.copyTo(corrected_data(cv::Rect(0, 0, width/2, height/2))); // ... 同理放回g1, g2, b。此处代码略,需仔细处理。 // --- 步骤3: 去马赛克(Demosaic)--- cv::Mat linear_rgb; // 使用OpenCV的demosaic函数,注意选择正确的Bayer模式 cv::cvtColor(corrected_data, linear_rgb, cv::COLOR_BayerRG2BGR); // 假设是RGGB模式 // --- 步骤4: 伽马校正(Gamma Correction)--- cv::Mat normalized; // 先将16位数据归一化到0-1之间(假设最大值为2^16-1=65535) linear_rgb.convertTo(normalized, CV_32F, 1.0 / 65535.0); cv::Mat gamma_corrected; float gamma = 1.0 / 2.2; // 标准sRGB Gamma值 cv::pow(normalized, gamma, gamma_corrected); // 将结果转换回8位用于显示和保存 gamma_corrected.convertTo(gamma_corrected, CV_8U, 255.0); // --- 输出结果--- cv::imwrite("output_srgb.jpg", gamma_corrected); std::cout << "ISP pipeline processing completed!" << std::endl; return 0; }重要提示 :此代码是一个概念性框架 。实际运行中最棘手的部分是步骤0:RAW文件的正确读取。您可能需要根据RAW的具体格式(位深、排列方式)编写或寻找专门的解析器。
🔬 第三步:学习资源与深化理解
- 开源项目精读 :
ISP-pipeline-hdrplus是一个宝库。建议您仔细阅读其代码,看它如何组织ISP管道、如何处理MIPI RAW数据、以及如何集成降噪等高级模块。这是从"能跑通"到"理解工业级实现"的关键一步。 - C++学习:如果对现代C++特性不熟悉,可以参考清华大学郑莉老师的C++课程大纲或CppReference等网站,系统学习面向对象、模板和STL容器。
🔍 调试与验证技巧
- 逐阶段输出图像:在每个主要步骤(BLC后、AWB后、Demosaic后)都输出中间图像。用RawDigger和任何图片查看器对比观察,理解每个算法对图像的实际影响。
- 数据验证:在代码中关键点打印出矩阵的统计值(如最小值、最大值、均值),与RawDigger的统计信息进行交叉验证,确保数据处理逻辑正确。
🚀 进阶指导(为下一阶段做准备)
当这个基础管道运行起来后,您就拥有了一个宝贵的实验平台。接下来可以:
- 替换算法 :例如,将简单的灰度世界AWB换为更复杂的完美反射法。
- 集成更复杂的模块 :参考HDR-ISP项目,尝试加入色彩校正矩阵(CCM) 和镜头阴影校正(LSC)。
- 引入AI:在降噪或Demosaic环节,思考如何用一个小型神经网络来提升效果。
- 如果想了解一些成像系统、图像、人眼、颜色等等的小知识,快去看看视频吧 :
- 抖音:数字图像哪些好玩的事,咱就不照课本念,轻轻松松谝闲传
- 快手:数字图像哪些好玩的事,咱就不照课本念,轻轻松松谝闲传
- B站:数字图像哪些好玩的事,咱就不照课本念,轻轻松松谝闲传
- 认准一个头像,保你不迷路:

- 认准一个头像,保你不迷路: