项目环境
基于Kinect 2.0 与 Alpha 1s 阿尔法机器人的体感控制开发
项目说明
项目通过Kinect捕捉人体动作数据,通过蓝牙模块控制 Alpha Robot (优必选阿尔法机器人1S)
演示视频
使用kinect体感控制机器人
项目技术点
Todo List:
- 蓝牙通信
- 串口开发(项目可实现的基础)
- Kinect获取到的骨骼节点三维坐标数据与Alpha 1S电机转动角度的转换运算
- 机器人动作重心偏移解决方法
- 解决Kinect排除多人数据捕捉干扰方法
项目硬件模块

- BLE蓝牙4.0串口模块
带底板HC-05主从机一体蓝牙模块 无线串口透传通讯 兼容arduino \ CH340G代替PL2303 USB转TTL 转串口 中九升级小板 刷机线 STC下载 - Kinect One 2.0(可同时记录6个人的20个关节点)
XBOX ONE/S Kinect 2.0感应器 开发高清体感摄像头 Kinect体感器 \ Alpha 1s 阿尔法机器人 (16个自由度) - Win8系统以上的主机 (支持USB3.0+内存在4G以上)
开发环境搭建
- 安装Kinect开发环境 完成后插入Kinect设备看是否正常
- 安装.net framework 与 visual studio 开发环境
- 打开vs , 导入项目工程文件
- 按淘宝买来的蓝牙模块组装后,按附带的教程,测试蓝牙发射模块是否可行
- 去优必优官网下载蓝牙控制指令文档
蓝牙控制指令文档
用户使用说明书 - 确定可以通过PC发送指令给机器人,机器人能动
- 核实蓝牙模块插的USB口与代码里的一致
- 运行项目程序 (应该有动作了,祝你好运),也可以自己打包生成BIN文件 ,下次直接双击运行就可了,因为代码目录里的BIN文件是基于我的电脑环境的,所以在你的电脑可能会不行,USB口一致性的问题,也可以在VS里下载个打包插件,这样能生成EXE,也是可以的
开发软件环境
- Kinect for Windows SDK 2.0(附带kinect browser与kinect studio)
- 串口调试助手
- Visual Studio 2017(本项目使用C#)
实现原理思路
利用Kinect获取人体骨骼关节点的三维空间坐标数据(x,y,z)
Kinect技术可追踪20个骨骼关节点,骨骼数据包含20个关节点的X,Y,Z坐标信息,我们利用Kinect SDK
里的BodyBase案例里的深度图像处理技术进行二次开发,取相对应的14个节点数值
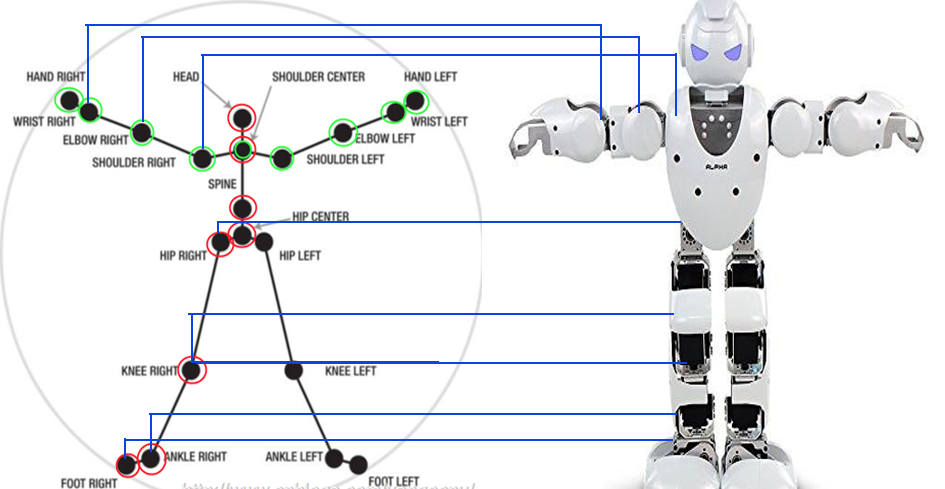
(图片只画出左侧标注)
- 头部(Head) --肩膀中心(ShoulderCenter)
- 肩膀中心(ShoulderCenter) -- 脊柱中心(Spine)
- 脊柱中心(Spine) -- 髋部中心(HipCenter)
- 髋部中心(HipCenter) -- 左或右膝关节(KneeLeft or KneeRight)
- 左膝关节KneeLeft(右膝关节KneeRight) -- 左踝关节leLeft (右踝关节AnkleRight)
- 左踝关节AnkleLeft (右踝关节AnkleRight)- 左脚FootLeft (右脚FootRight)
- 左手(HeadLeft) --左手腕(Wrist Left)
- 左手腕(Wrist Left) -- 左胳膊肘(Elbow Left)
- 左胳膊肘(Elbow Left) -- 左肩膀(Shoulder Left)
- 左肩膀(Shoulder Left)--肩膀中心(Shoulder Center)
- 肩膀中心(Shoulder Center)-右肩膀(Shoulder Right)
- 右肩膀(Shoulder Right)- 右胳膊肘 (Elbow Right)
- 右胳膊肘 (Elbow Right)- 右手腕(Wrist Right)
- 右手腕(Wrist Right)- 右手 (Hand Right)
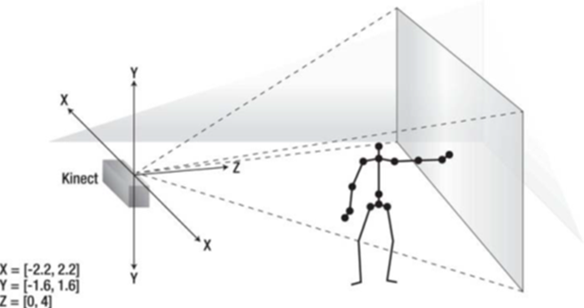
Kinect 人体感应示意图
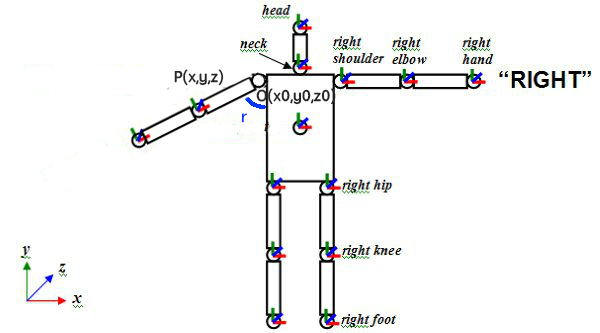
面向感应器,X代表左右,Y代表上下,Z代表前后(距离在1.2~3.5m范围内,1.8米最适合) 蓝牙通信协议开发标准(可上优必选官网下载,看懂文档是开发者的基本功就不多说了)
要注意的是它是16进制,需要把组装好的命令字符串进行转换打包后,通过蓝牙模块发送 应用三角函数进行角度转换
面向感应器,三维坐标在扫描画面的左下角,以人体画面左边手臂为参考; 手从竖直立正抬至P状态为动作过程分析,r为与身体初始位置时的角度; 每一帧获取到的r值随运动改变,舵机也将即时改变角度;
体感控制示意图(面向设备)
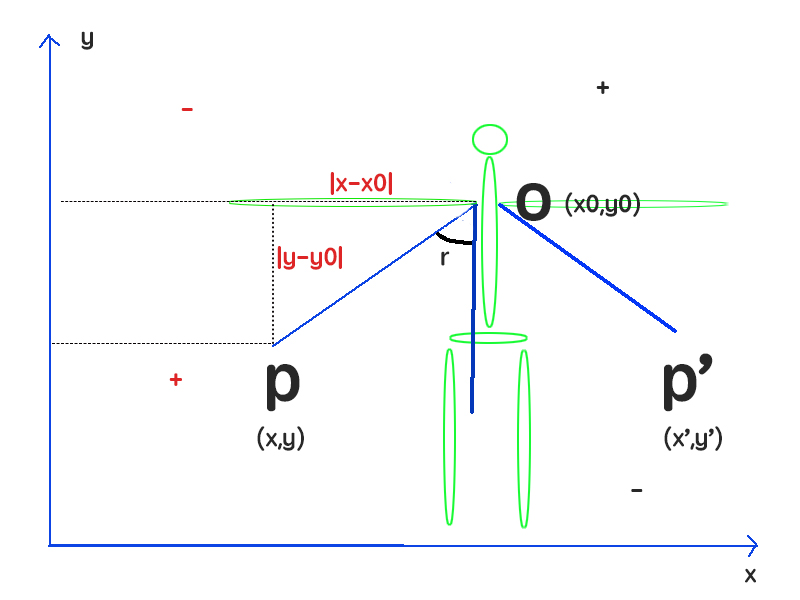
设P状态下,取shoulder肩部点O(x0,y0,z0),elbow肘部点P(x,y,z),Z轴值保持不变;
对于肘到肩部shoulder所对应的机器人电机可忽略Z轴的影响,即通过这两点的X与Y值来求出r值。
当双手竖直向下时,Alpha 1S机器人有以下初始值:
- 机器人的左手(即画面右则手臂) shoulder对应的机器人电机初始角度为 0 度,竖直向上时为180度;
- 机器人的右手(即画面左则手臂) shoulder对应的机器人电机初始角度 180 度,竖直向上时为0度;
tan值的 + 与 -- 区域正好可表达角度是大于90度还是小于90度,也可观察其递变规律。
转化为平面三角运算示意图为:
当手竖直向下时 电机角度 r= 0 ,当手竖直向上时,电机角度 r= 180; 则

将小数转换成实际角度

将含有角度值的命令字符串用16进制转换后通过蓝牙传给机器人,即可响应。
同样道理,当手向前水平合拢时,肩部关节点shoulder基本不变,通过X与Z轴求得手臂在肩部点前后转动的角度,方法与公式就不再详细说明。
PS:这是一个非常粗暴的通过公式计算来控制舵机的方法,纯属兴趣实验性质,硬件通信是他人实现。