目录
[STC - ISP 波特率计算](#STC - ISP 波特率计算)
[STC - ISP 串口助手使用](#STC - ISP 串口助手使用)
[1.串口向电脑每秒发送递增数据 代码:](#1.串口向电脑每秒发送递增数据 代码:)
[2.电脑通过串口控制LED 代码:](#2.电脑通过串口控制LED 代码:)
2个小项目的的现象:
1.串口向电脑发送数据
2.通过电脑向单片机发送数据,控制P2的亮灭,返回电脑向单片机发送的数据给电脑
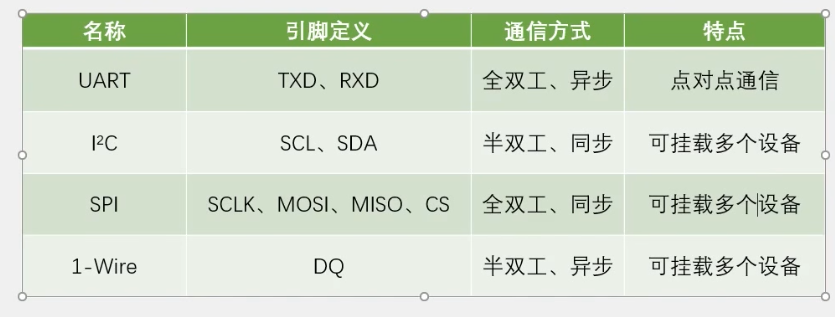
51单片机内部自带UART(通用异步发收器)可实现单片机的串口通信
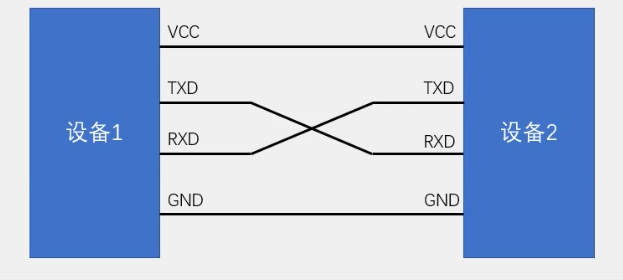
简单的双向串口通信有两根通信线(发送端TXD和接收端RXD)
电平标准
电平标准就是 规定什么电压是0什么电压是1
TTL电平:5V表示1,0V表示0
RS232电平:-3V ~ -15V 表示1,3v ~ 15V 表示0
RS485电平:两线压差+2 ~ +6V表示1,-2V ~ -6V表示0(差分信息)
TTL 和 RS232 电平受电线长度影响最大范围只有几十米
RS485 也受电线长度影响但由两线电压的差值决定数据,所以最长范围有千米
专业术语的解释
全双工:通信双方可以在同一时刻互相传输数据
半双工:通信双方可以互相传输数据,但必须分时复用一根数据线
单工:通信只能有一方发送到另一方,不能反向传输
异步:通信双方各自约定通信速率
同步:通信双方靠一根时钟线来约定通信速率
总线:链接各个设备的数据传输线路
UART模式1
51单片机的UART有4种工作模式
最常用的模式是:模式1,8位UART,波特率可变
波特率:串口通信的速率(发送和接收各数据位的间隔时间)
检验位:用于数据检验
停止位:用于数据帧间隔
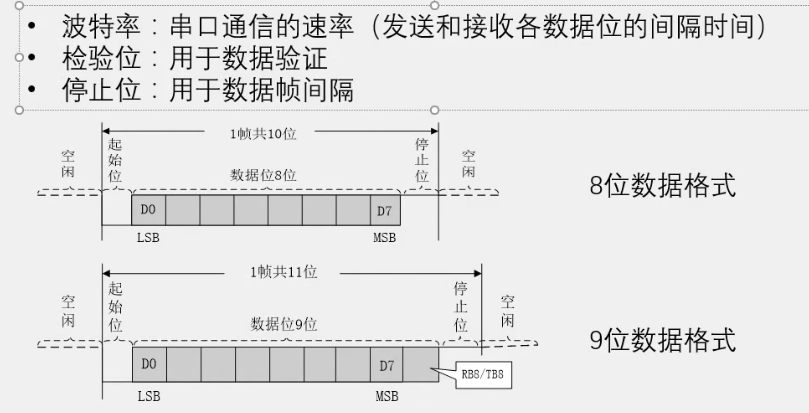
数据位几位就是UART几位
9位UART,在8为UART上,最后多一位,用于校验
例如:发送数据为 0000 0011 根据数据中的1的个数继续判断最后一位补什么
奇校验:保证数据中1的个数为奇数 0000 0011 补1
偶校验:保证数据中1的个数为偶数 0000 0011 补0
数据的发送
例如:发送 0000 0011 由后向前发送 发送顺序为 1100 0000
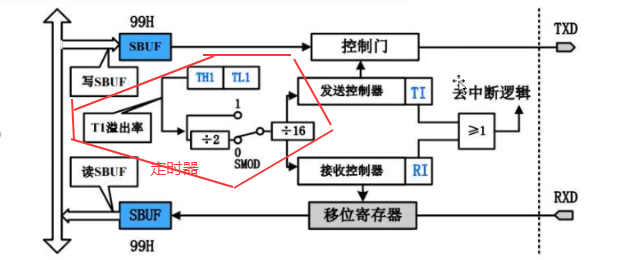
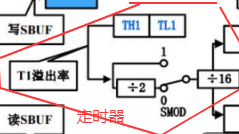
串口模式图
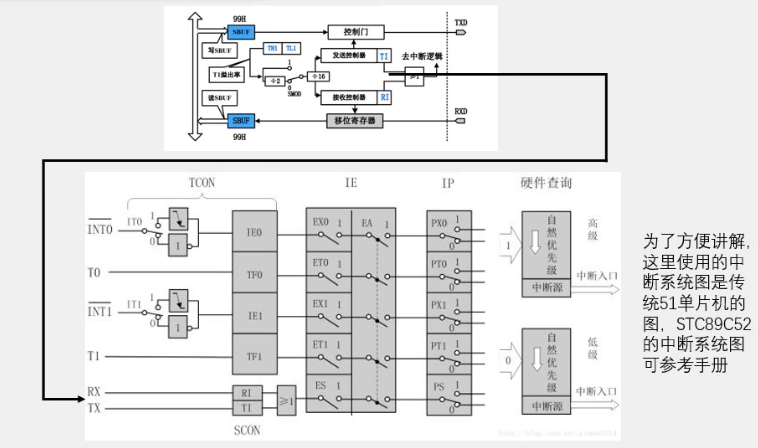
串口相关的寄存器
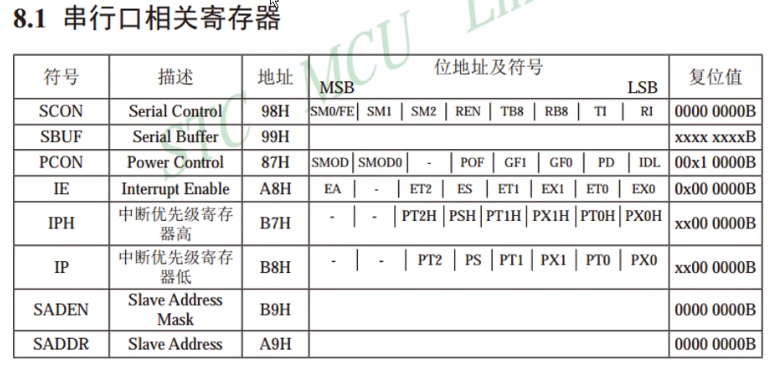
将SM0 和SM1配置为 0 1 就是UART模式1
REN:控制串口接收 1为允许接收 0为禁止接收
TI 和 RI 分别为 判断发送完成和接收完成的标准
SMOD控制UART的时钟,记数速度
当TI 等于 0 时,串口发送信息完成后,TI会被自动赋值为1,然后向中断发送请求,TI不会自动赋值回0,所以在中断中需要重新赋值为0
RI类似
SCAN初始化 为 0101 0000(0x50) 或者0100 0000(0x40)第一个向电脑发送数据不需要接收
UART利用的是定时器1,这里计时需要用上8位定时重装
定时器8位定时重装模式
重装模式说的是先前利用 16位模式 计算器每1毫秒发送一次中断,在中断赋值这个操作,重装模式自己附带了
STC - ISP 波特率计算
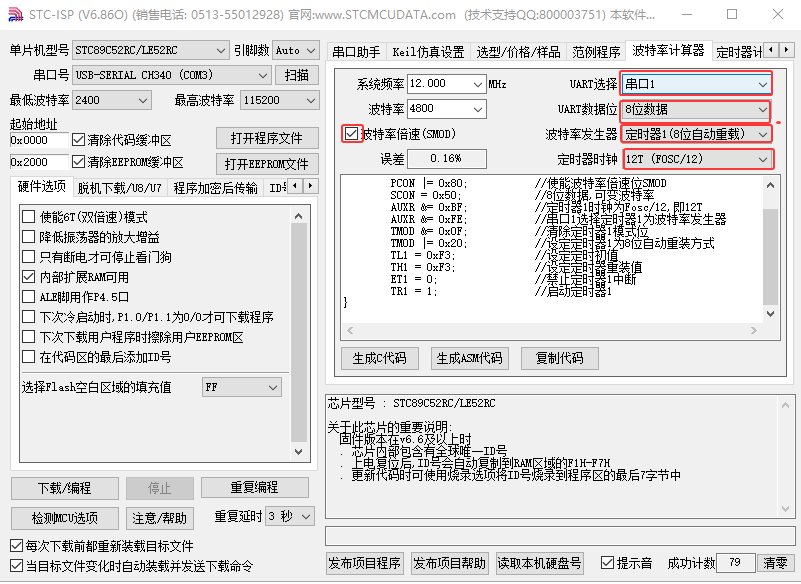
生产代码后将第3行和第4行删除
初始化函数:
cpp
void UartInit(void) //4800bps@11.0592MHz
{
PCON &= 0x7F; //波特率不倍速
SCON = 0x50; //8位数据,可变波特率
TMOD &= 0x0F; //清除定时器1模式位
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xFA; //设定定时初值
TH1 = 0xFA; //设定定时器重装值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
}STC - ISP 串口助手使用
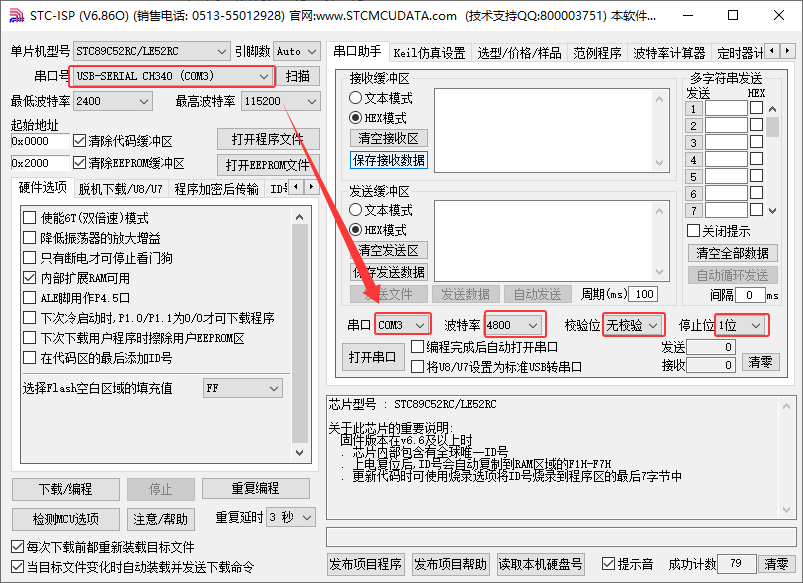
波特率和程序波特率一致
由于金振的原因,波特率太高会丢失数据,所以常用4800
1.串口向电脑每秒发送递增数据 代码:
cpp
#include <REGX52.H>
#include "Delay.h"
void UART_Init()
{
SCON = 0x50;
PCON |= 0x80;
TMOD &= 0x0F;
TMOD |= 0x20;
TL1 = 0xF4;
TH1 = 0xF4;
ET1 = 0;
TR1 = 1;
}
void UART(unsigned char num)
{
SBUF = num;
while(TI == 0);
TI = 0;
}
int main()
{
unsigned int i = 0;
UART_Init();
while(1)
{
UART(i);
i++;
Delay(1000);
}
return 0;
}2.电脑通过串口控制LED 代码:
cpp
#include <REGX52.H>
void UART_Init() //11.0592MHz 4800
{
SCON = 0x50;
PCON |= 0x80;
TMOD &= 0x0F;
TMOD |= 0x20;
TL1 = 0xF4;
TH1 = 0xF4;
ET1 = 0;
TR1 = 1;
EA = 1;
ES = 1;
}
void UART_Cpy(unsigned char num)
{
SBUF = num;
while(TI == 0);
TI = 0;
}
int main()
{
UART_Init();
while(1)
{
;
}
return 0;
}
void UART_Routine() interrupt 4
{
if(RI == 1)
{
RI = 0;
P2 = SBUF;
UART_Cpy(SBUF);
}
}波特率计算流程
这里计算11.0592MHz的波特率
256(定时器单个计数器最大值) - F4(244)(赋给计数器的值) = 12
每计算12次就溢出一次
这里计算11.0592MHz 每微妙计算几次:
11.092 除 12 = 0.9216
0.9216 除 12 = 0.0768(溢出率)
由于 PCON 赋值为 0x80; 其中第八位 SMOD0 = 1;所以 SMOD0指向1
0.0768(溢出率) 除 1 = 0.0768
0.0768 除 16 乘 1000 000 (因为单位是MHz) = 4800