RDK x5 镜像备份
- 前期准备
-
- [1 准备读卡器和SD卡](#1 准备读卡器和SD卡)
- [2 接入RDK X5](#2 接入RDK X5)
- [3 查看SD卡显示](#3 查看SD卡显示)
- 关键步骤
-
- [ubuntu 下ext4格式挂载磁盘](#ubuntu 下ext4格式挂载磁盘)
- 官方教程
- [成功备份( 终端输出 )](#成功备份( 终端输出 ))
前期准备
1 准备读卡器和SD卡
新 SD 卡好像默认是 ext4 格式

2 接入RDK X5
3 查看SD卡显示
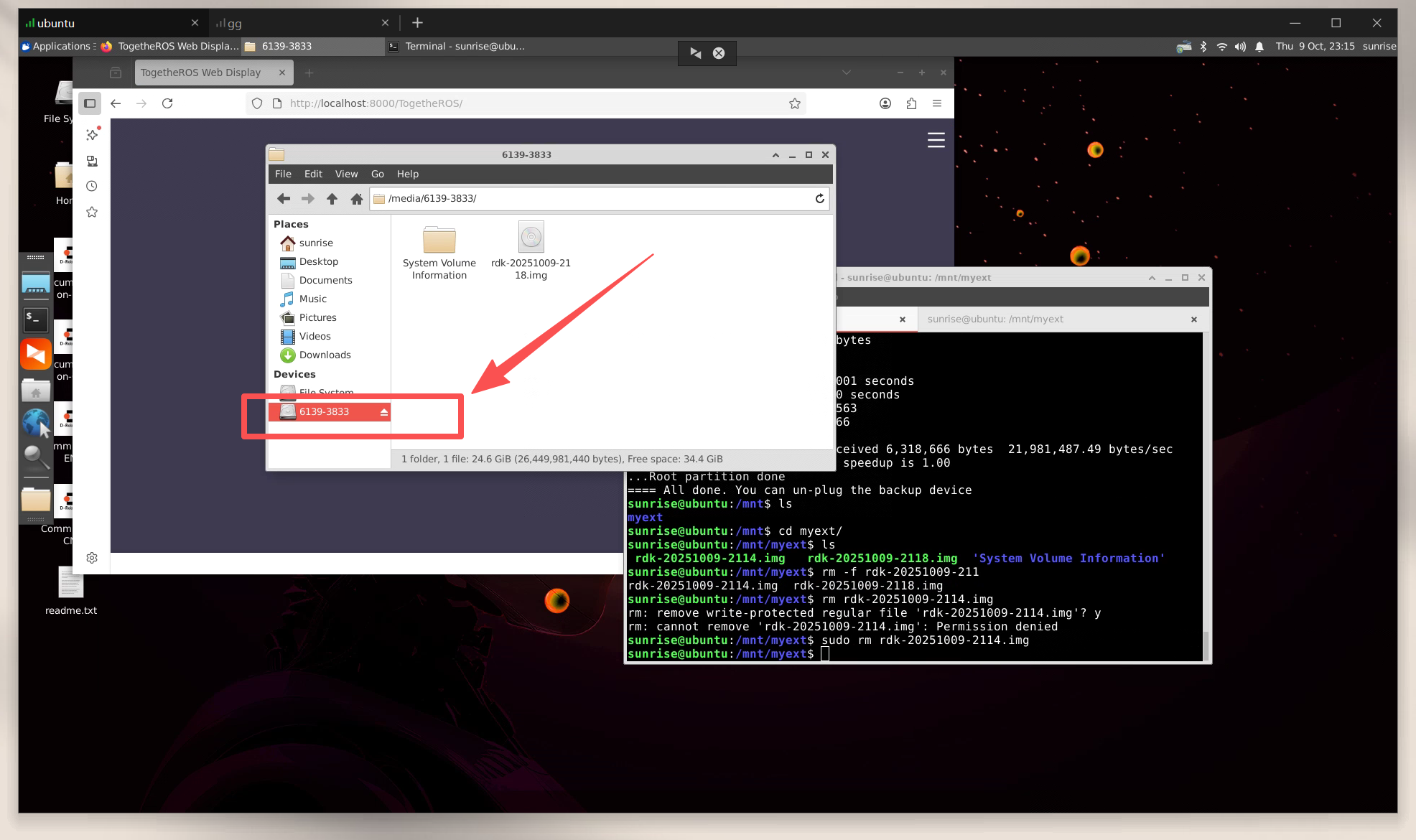
新插入的SD卡显示在 /media 路径下面,但在 /mnt 路径下没有
关键步骤
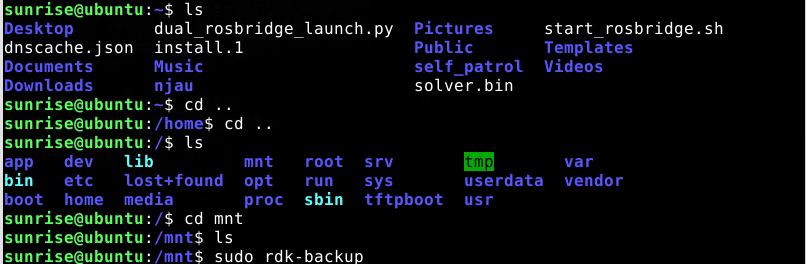
ubuntu 下ext4格式挂载磁盘
bash
sudo mkdir mnt/mytext
sudo mount /dev/sda1 /mnt/mytext/
df -lh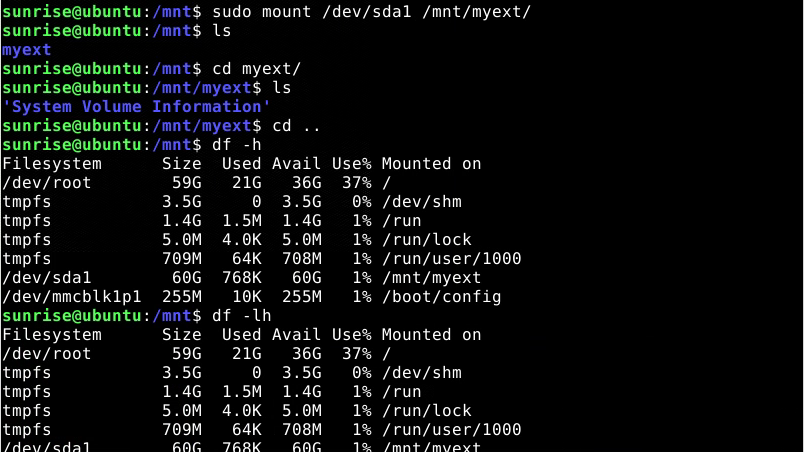
参考文章:Linux (ubuntu18) 下ext4格式挂载磁盘
官方教程
参考官方教程:rdk-backup命令 用于将当前系统备份成镜像。
注意给路径就行!!!
bash
sudo rdk-backup /mnt/myext
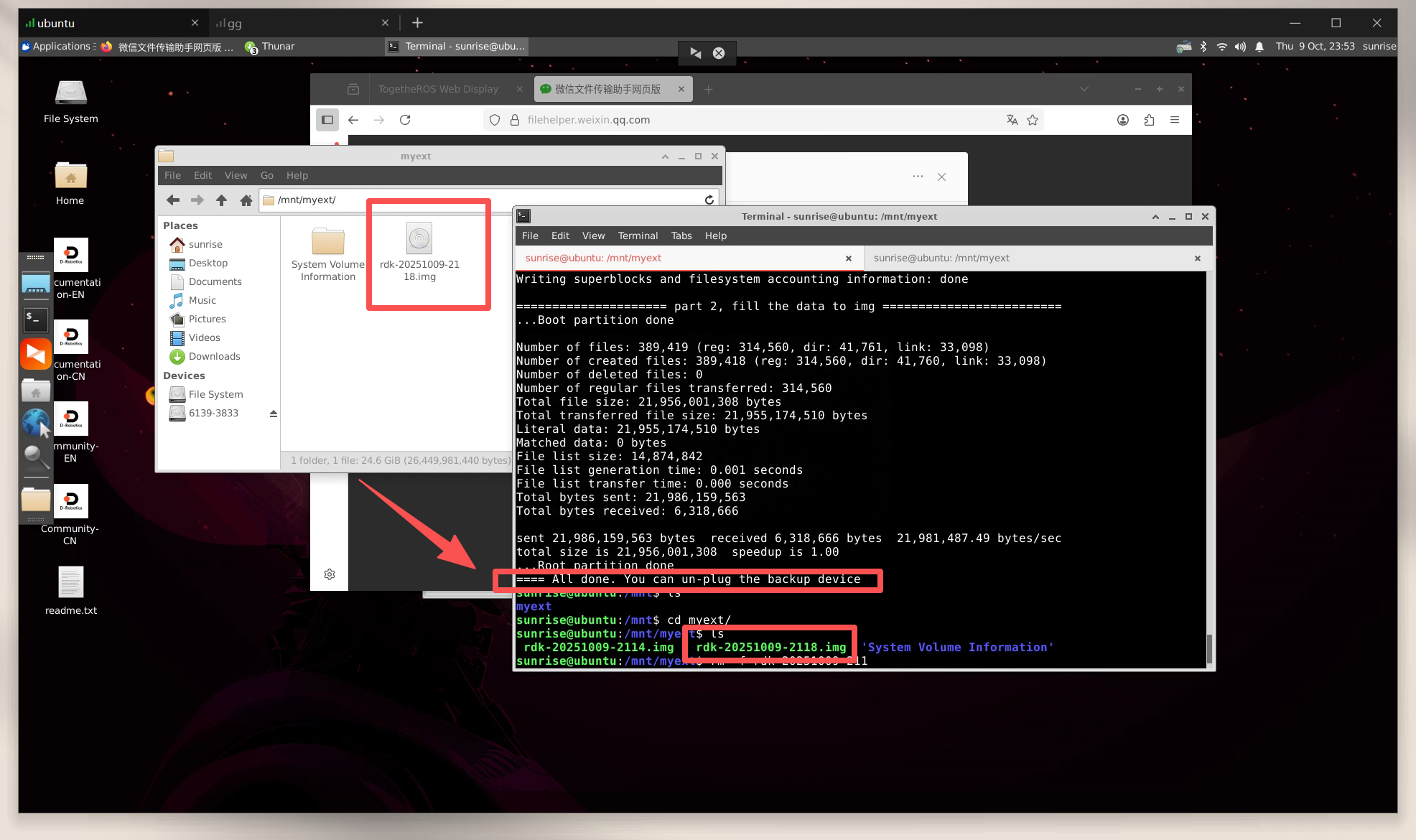
成功备份( 终端输出 )
保存的文件名称格式: rdk-年月日-时分.img
bash
sunrise@ubuntu:/mnt$ sudo rdk-backup /mnt/myext
mount_dir: /mnt/myext
Hit:1 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy InRelease
Hit:2 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports jammy InRelease
Hit:3 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports jammy-updates InRelease
Hit:4 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports jammy-backports InRelease
Hit:5 https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports jammy-security InRelease
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
366 packages can be upgraded. Run 'apt list --upgradable' to see them.
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
dosfstools is already the newest version (4.2-1build3).
parted is already the newest version (3.4-2build1).
exfat-fuse is already the newest version (1.3.0+git20220115-2).
kpartx is already the newest version (0.8.8-1ubuntu1.22.04.4).
rsync is already the newest version (3.2.7-0ubuntu0.22.04.4).
The following packages were automatically installed and are no longer required:
fonts-lato ignition-tools ignition-transport11-cli libavdevice-dev
libavfilter-dev libccd-dev libccd2 libdart-collision-bullet-dev
libdart-collision-bullet6.12 libdart-collision-ode-dev
libdart-collision-ode6.12 libdart-dev libdart-external-convhull-3d-dev
libdart-external-ikfast-dev libdart-external-odelcpsolver-dev
libdart-external-odelcpsolver6.12 libdart-utils-dev libdart-utils-urdf-dev
libdart-utils-urdf6.12 libdart-utils6.12 libdart6.12 libfcl-dev libfcl0.7
libfreeimage3 libgts-dev libignition-common4 libignition-common4-av
libignition-common4-av-dev libignition-common4-core-dev
libignition-common4-dev libignition-common4-events
libignition-common4-events-dev libignition-common4-graphics
libignition-common4-graphics-dev libignition-common4-profiler
libignition-common4-profiler-dev libignition-fuel-tools7
libignition-fuel-tools7-dev libignition-gazebo6 libignition-gazebo6-dev
libignition-gazebo6-plugins libignition-gui6 libignition-gui6-dev
libignition-math6-eigen3-dev libignition-msgs8 libignition-msgs8-dev
libignition-physics5 libignition-physics5-bullet
libignition-physics5-bullet-dev libignition-physics5-core-dev
libignition-physics5-dartsim libignition-physics5-dartsim-dev
libignition-physics5-dev libignition-physics5-heightmap-dev
libignition-physics5-mesh-dev libignition-physics5-sdf-dev
libignition-physics5-tpe libignition-physics5-tpe-dev
libignition-physics5-tpelib libignition-physics5-tpelib-dev
libignition-plugin libignition-plugin-dev libignition-rendering6
libignition-rendering6-core-dev libignition-rendering6-dev
libignition-rendering6-ogre1 libignition-rendering6-ogre1-dev
libignition-rendering6-ogre2 libignition-rendering6-ogre2-dev
libignition-sensors6 libignition-sensors6-air-pressure
libignition-sensors6-air-pressure-dev libignition-sensors6-altimeter
libignition-sensors6-altimeter-dev libignition-sensors6-boundingbox-camera
libignition-sensors6-boundingbox-camera-dev libignition-sensors6-camera
libignition-sensors6-camera-dev libignition-sensors6-core-dev
libignition-sensors6-depth-camera libignition-sensors6-depth-camera-dev
libignition-sensors6-dev libignition-sensors6-force-torque
libignition-sensors6-force-torque-dev libignition-sensors6-gpu-lidar
libignition-sensors6-gpu-lidar-dev libignition-sensors6-imu
libignition-sensors6-imu-dev libignition-sensors6-lidar
libignition-sensors6-lidar-dev libignition-sensors6-logical-camera
libignition-sensors6-logical-camera-dev libignition-sensors6-magnetometer
libignition-sensors6-magnetometer-dev libignition-sensors6-navsat
libignition-sensors6-navsat-dev libignition-sensors6-rendering
libignition-sensors6-rendering-dev libignition-sensors6-rgbd-camera
libignition-sensors6-rgbd-camera-dev
libignition-sensors6-segmentation-camera
libignition-sensors6-segmentation-camera-dev
libignition-sensors6-thermal-camera libignition-sensors6-thermal-camera-dev
libignition-tools-dev libignition-transport11
libignition-transport11-core-dev libignition-transport11-dev
libignition-transport11-log libignition-transport11-log-dev
libignition-transport11-parameters libignition-transport11-parameters-dev
libignition-utils1 libignition-utils1-cli-dev libignition-utils1-dev libjxr0
libllvm13 liboctomap-dev liboctomap1.9 libode-dev libode8 libogre-1.9-dev
libogre-1.9.0v5 libogre-next-dev libogrenexthlmspbs2.2.5
libogrenexthlmsunlit2.2.5 libogrenextmain2.2.5
libogrenextmeshlodgenerator2.2.5 libogrenextoverlay2.2.5
libogrenextplanarreflections2.2.5 libogrenextsceneformat2.2.5
libpostproc-dev libqt5charts5 libqt5location5 libqt5location5-plugins
libqt5positioning5-plugins libqt5positioningquick5 libqt5quickcontrols2-5
libqt5quicktemplates2-5 libraw20 libruby3.0 libsdformat12 libsdformat12-dev
liburdfdom-dev liburdfdom-headers-dev liburdfdom-model-state3.0
liburdfdom-model3.0 liburdfdom-sensor3.0 liburdfdom-world3.0 libzip-dev
libzip4 libzzip-0-13 qml-module-qt-labs-folderlistmodel
qml-module-qt-labs-platform qml-module-qt-labs-settings qml-module-qtcharts
qml-module-qtgraphicaleffects qml-module-qtlocation qml-module-qtpositioning
qml-module-qtqml qml-module-qtqml-models2 qml-module-qtquick-controls
qml-module-qtquick-controls2 qml-module-qtquick-dialogs
qml-module-qtquick-layouts qml-module-qtquick-privatewidgets
qml-module-qtquick-templates2 qml-module-qtquick-window2
qtquickcontrols2-5-dev rake ros-humble-actuator-msgs
ros-humble-compressed-depth-image-transport
ros-humble-compressed-image-transport ros-humble-gps-msgs
ros-humble-image-transport-plugins ros-humble-ros-gz-bridge
ros-humble-ros-gz-image ros-humble-ros-gz-interfaces ros-humble-ros-gz-sim
ros-humble-ros-gz-sim-demos ros-humble-sdformat-urdf
ros-humble-theora-image-transport ros-humble-vision-msgs ruby
ruby-net-telnet ruby-rubygems ruby-webrick ruby-xmlrpc ruby3.0
rubygems-integration sdformat12-sdf
Use 'sudo apt autoremove' to remove them.
0 upgraded, 0 newly installed, 0 to remove and 366 not upgraded.
===================== part 1, create a new blank img ===============================
totalsz=25830060
boot: 8192 >>> 532479, root: 532480 >>> end
25830060+0 records in
25830060+0 records out
26449981440 bytes (26 GB, 25 GiB) copied, 956.077 s, 27.7 MB/s
Model: (file)
Disk /mnt/myext/rdk-20251009-2118.img: 26.4GB
Sector size (logical/physical): 512B/512B
Partition Table: msdos
Disk Flags:
Number Start End Size Type File system Flags
1 4194kB 273MB 268MB primary lba
2 273MB 26.4GB 26.2GB primary boot
device=/dev/mapper/loop1
mkfs.fat 4.2 (2021-01-31)
mke2fs 1.46.5 (30-Dec-2021)
Creating filesystem with 6390784 4k blocks and 1599360 inodes
Filesystem UUID: a6e4886d-f2ec-4aad-8219-2eb73c54e4e3
Superblock backups stored on blocks:
32768, 98304, 163840, 229376, 294912, 819200, 884736, 1605632, 2654208,
4096000
Allocating group tables: done
Writing inode tables: done
Creating journal (32768 blocks): done
Writing superblocks and filesystem accounting information: done
===================== part 2, fill the data to img =========================
...Boot partition done
Number of files: 389,419 (reg: 314,560, dir: 41,761, link: 33,098)
Number of created files: 389,418 (reg: 314,560, dir: 41,760, link: 33,098)
Number of deleted files: 0
Number of regular files transferred: 314,560
Total file size: 21,956,001,308 bytes
Total transferred file size: 21,955,174,510 bytes
Literal data: 21,955,174,510 bytes
Matched data: 0 bytes
File list size: 14,874,842
File list generation time: 0.001 seconds
File list transfer time: 0.000 seconds
Total bytes sent: 21,986,159,563
Total bytes received: 6,318,666
sent 21,986,159,563 bytes received 6,318,666 bytes 21,981,487.49 bytes/sec
total size is 21,956,001,308 speedup is 1.00
...Root partition done
==== All done. You can un-plug the backup device