CSAE青年学者论坛:小米汽车陈龙-基于认知驱动的自动驾驶3.0
文章目录
-
-
- [1. Autonomy 1.0 & Autonomy 2.0](#1. Autonomy 1.0 & Autonomy 2.0)
- [2. Autonomy 3.0](#2. Autonomy 3.0)
- [3. GAIA-1](#3. GAIA-1)
- [4. ReSim](#4. ReSim)
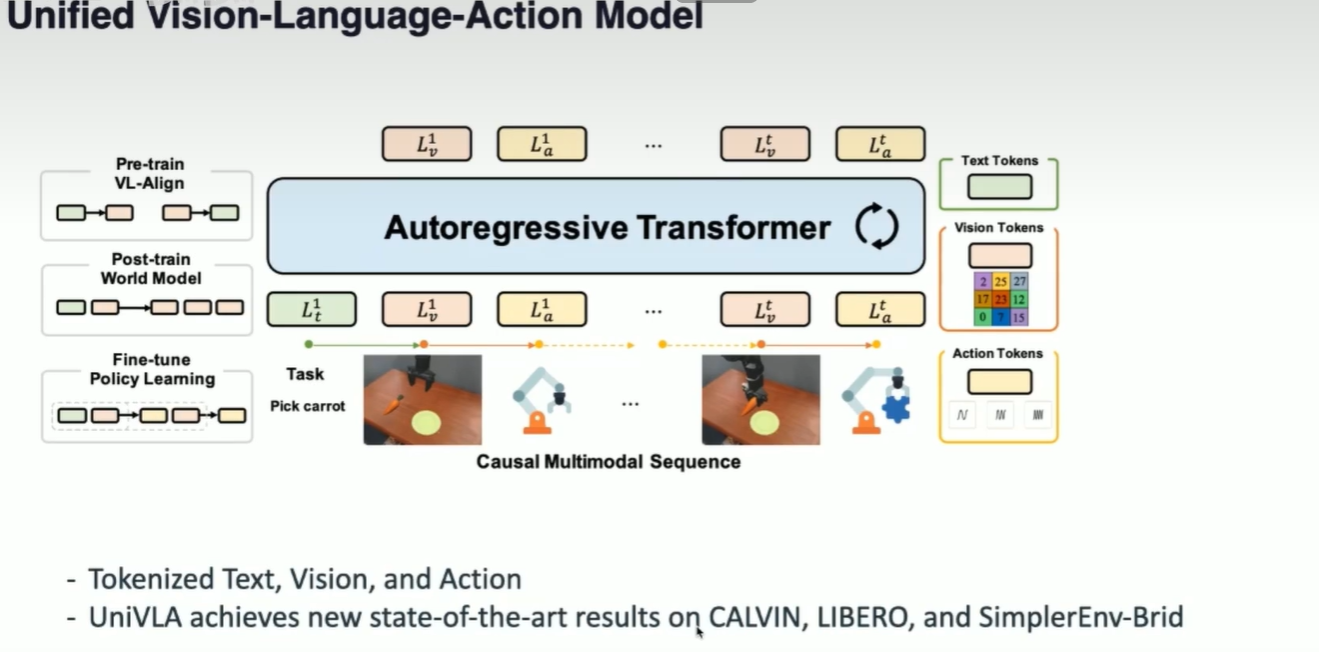
- [5. VLA](#5. VLA)
- [6. LingoQA](#6. LingoQA)
- [7. LINGO-2](#7. LINGO-2)
- [8. SimLingo](#8. SimLingo)
- [9. ReCogDrive](#9. ReCogDrive)
- [10. Summary](#10. Summary)
-
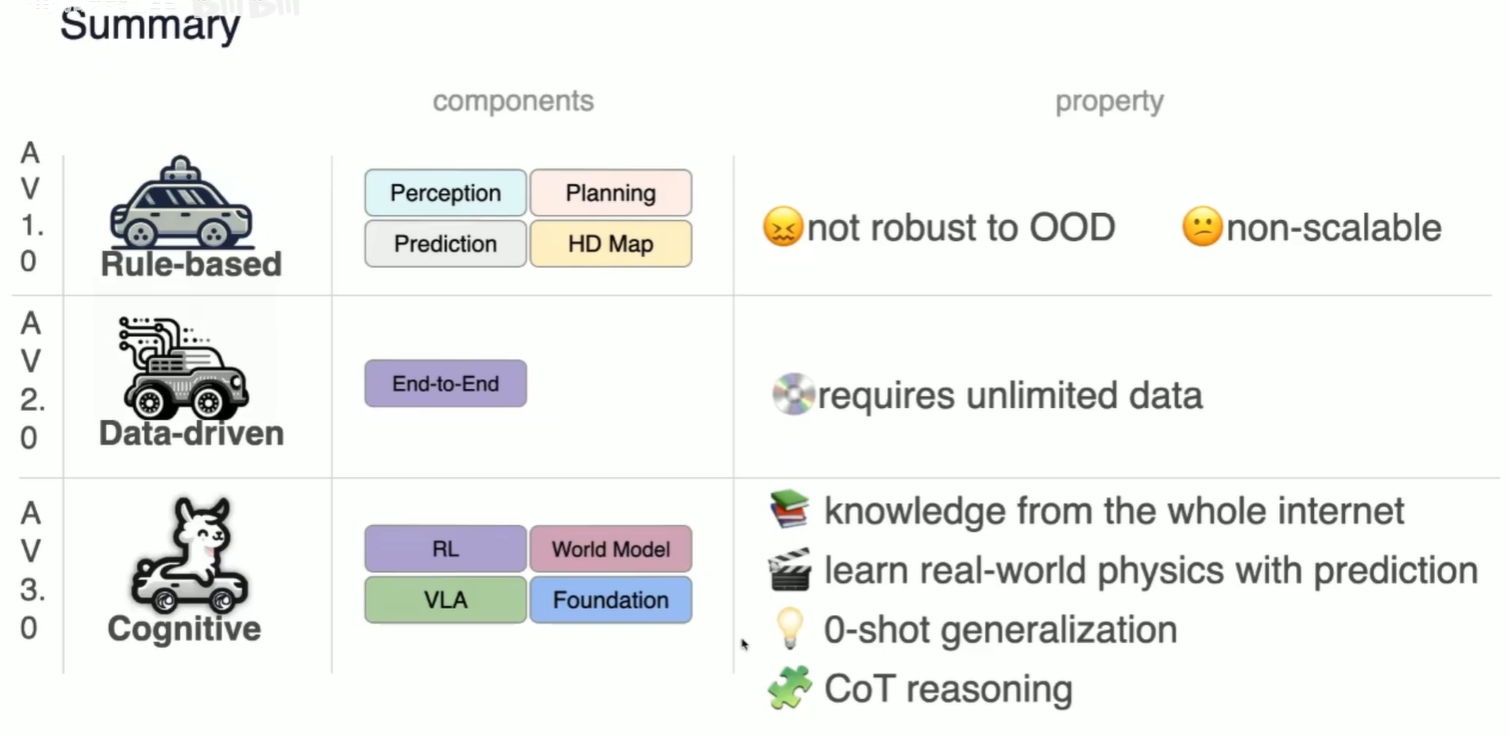
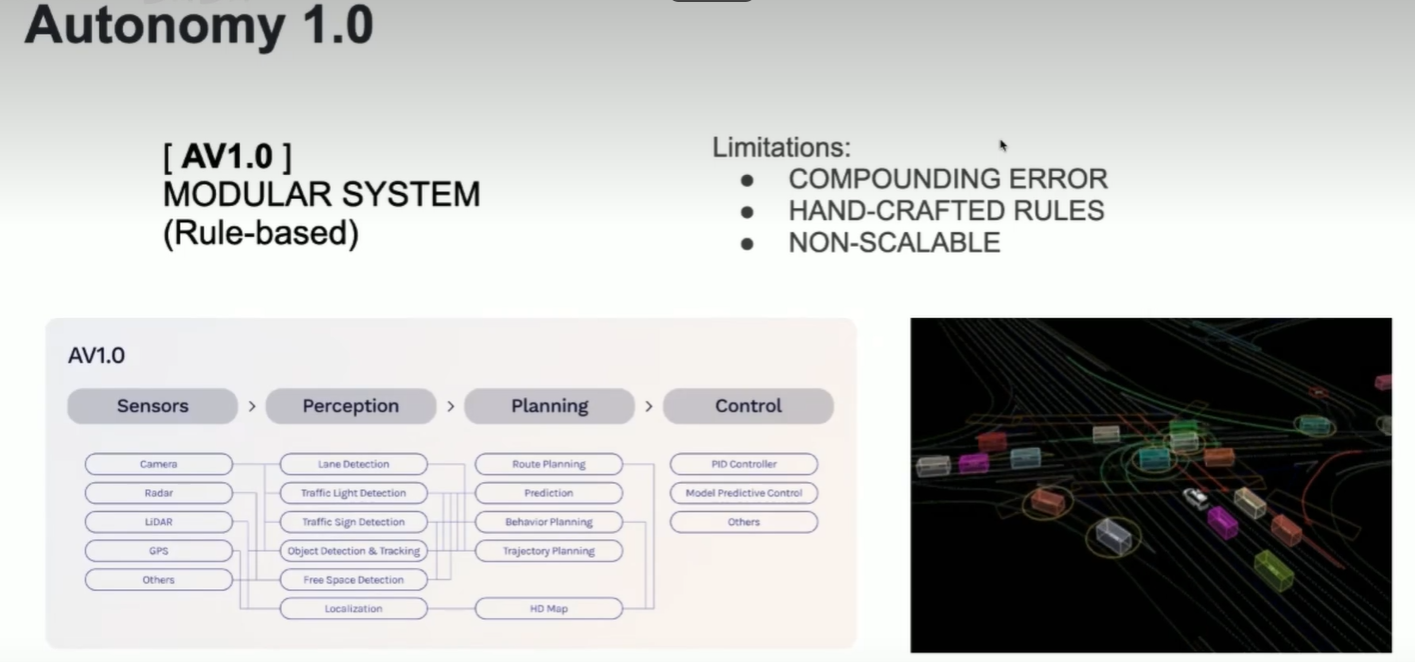
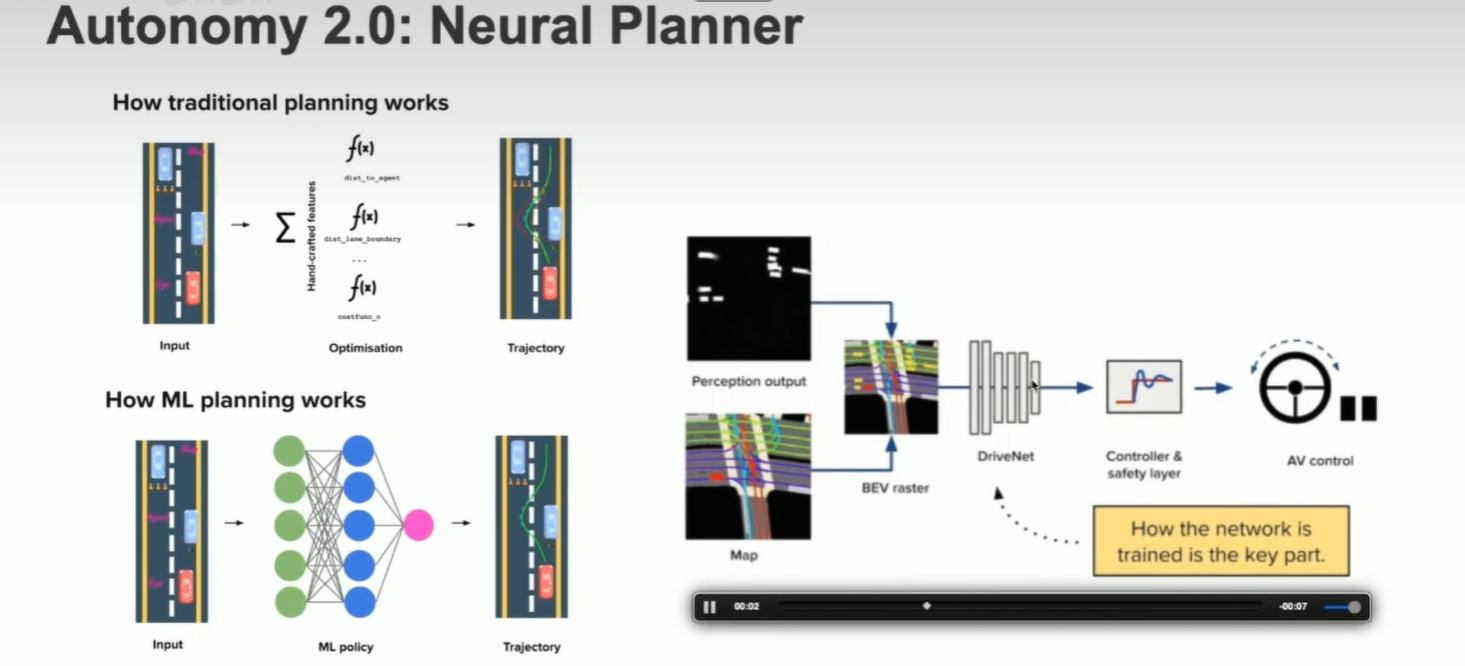
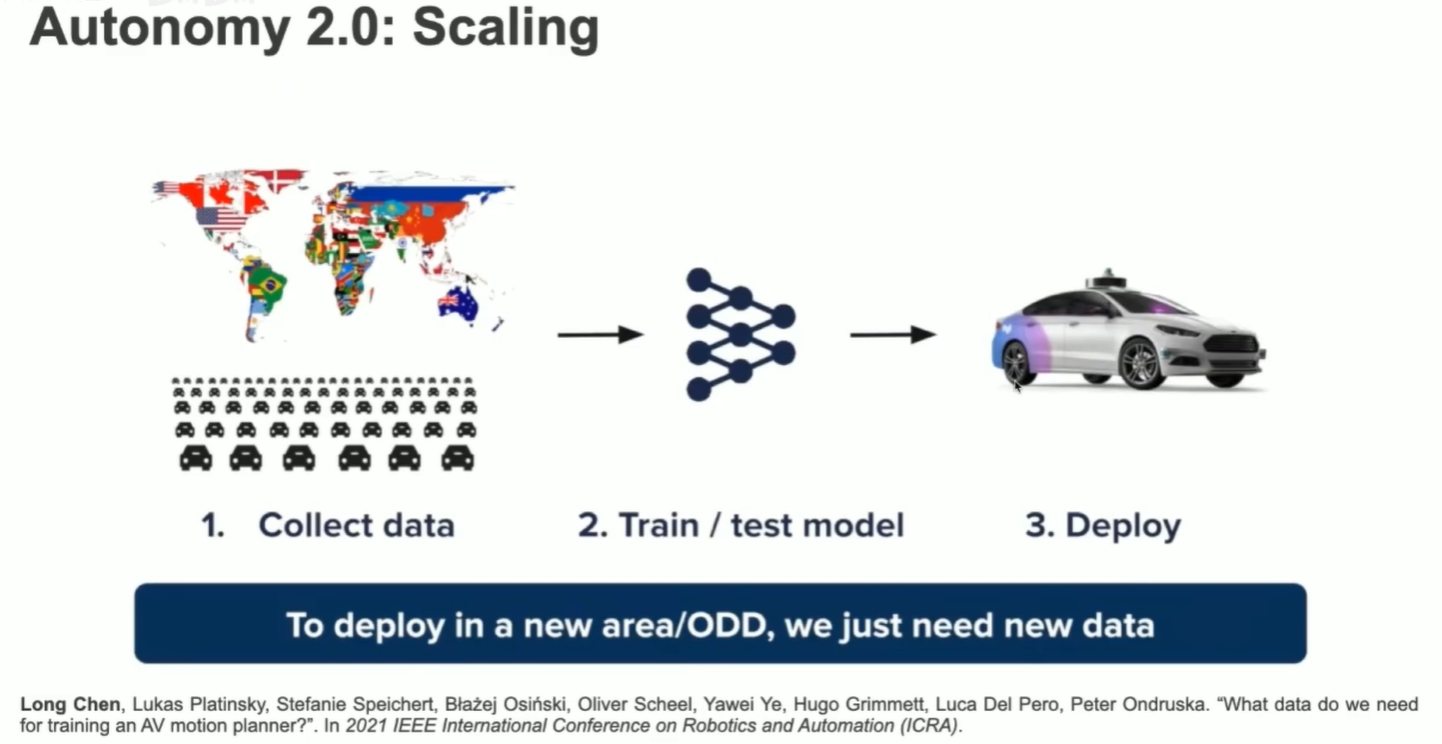
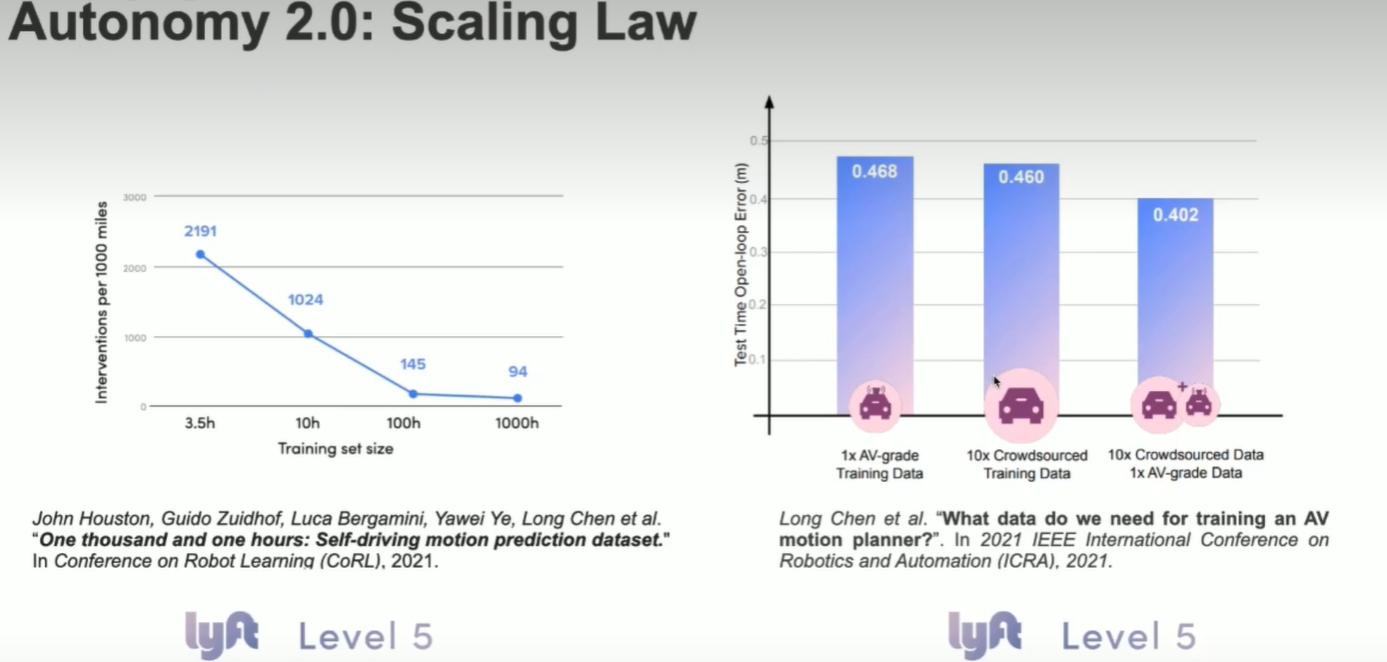
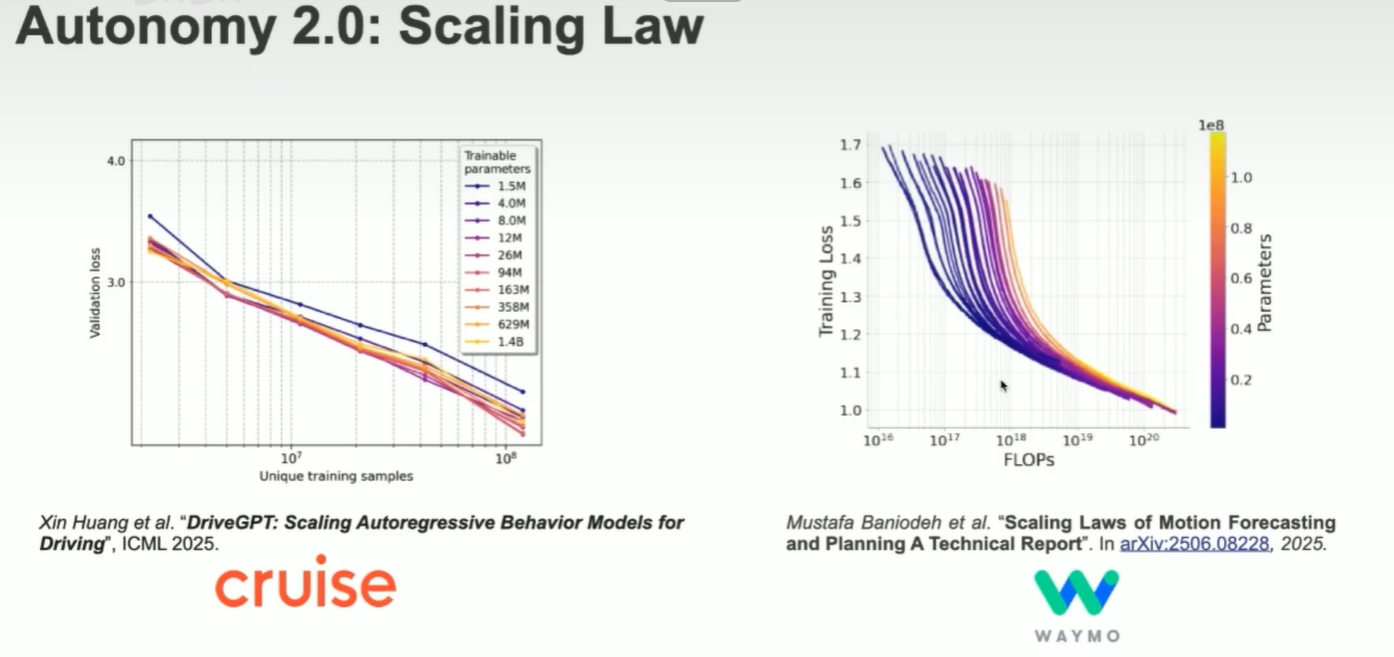
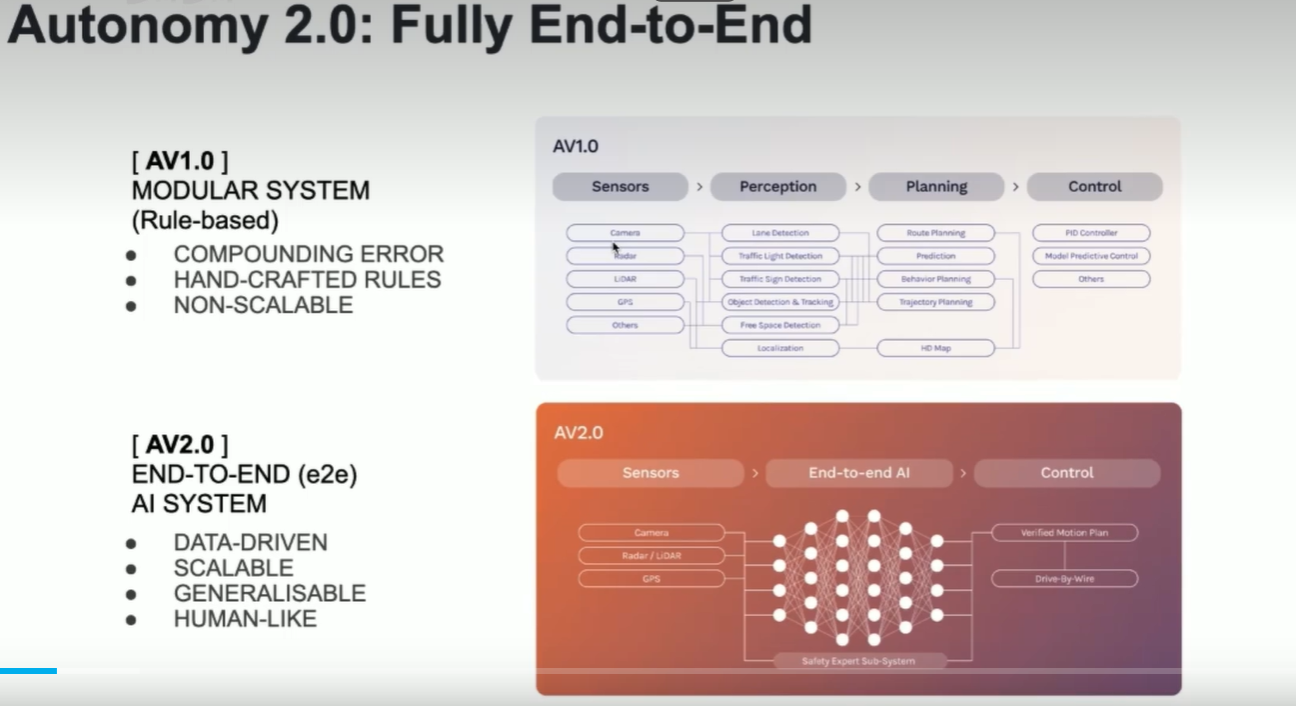
1. Autonomy 1.0 & Autonomy 2.0

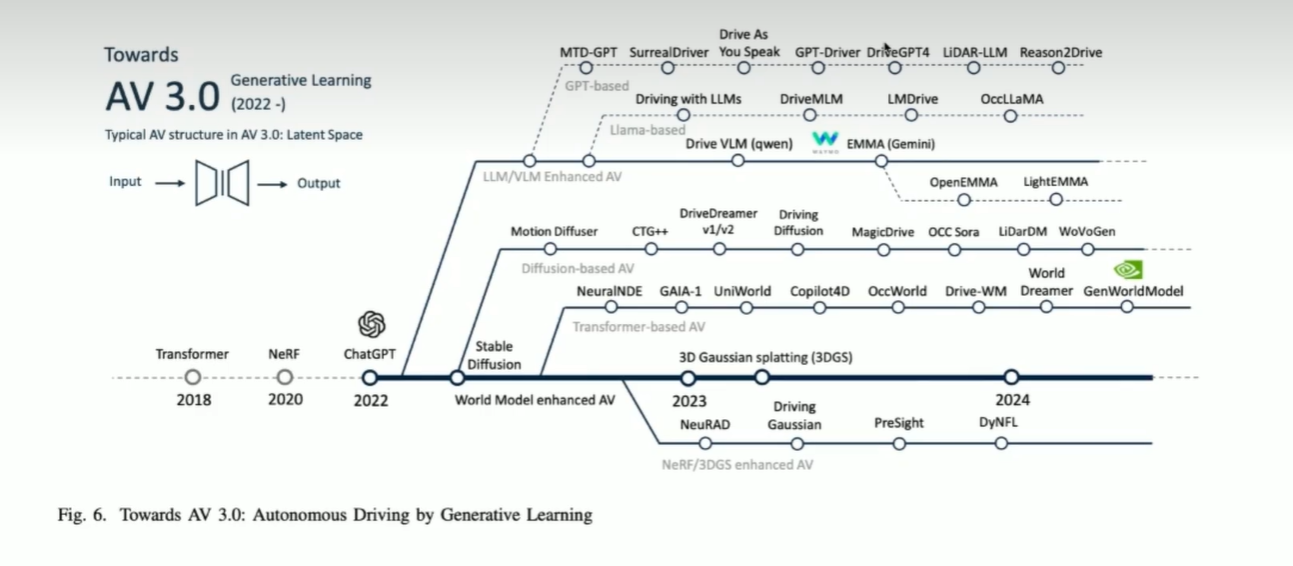
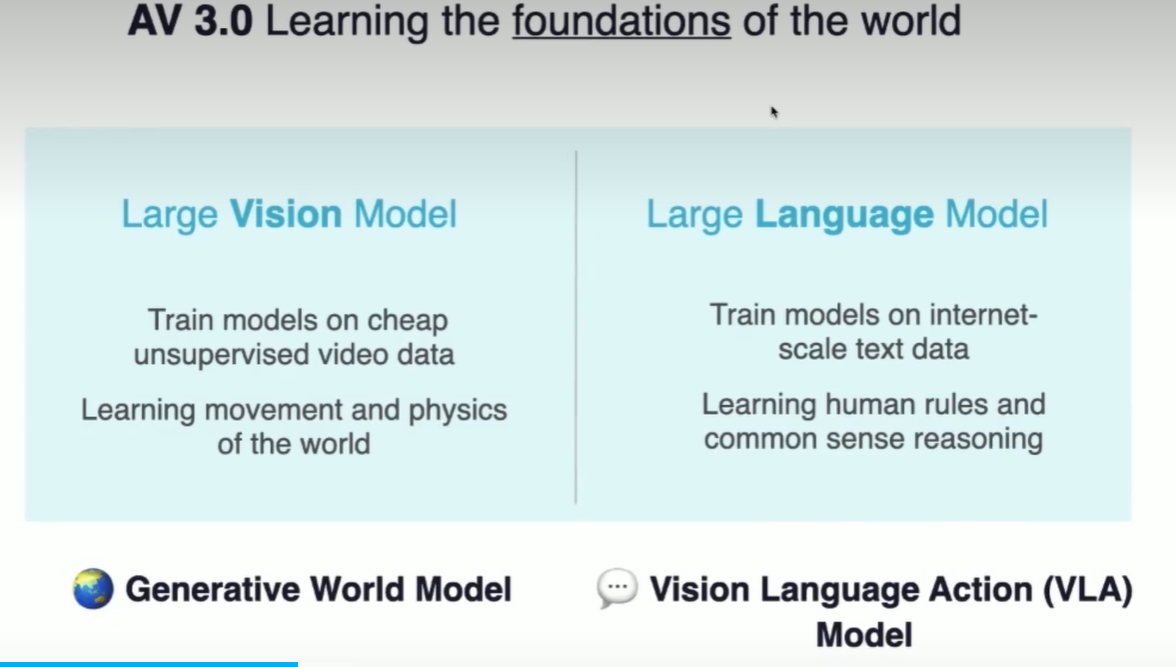
2. Autonomy 3.0
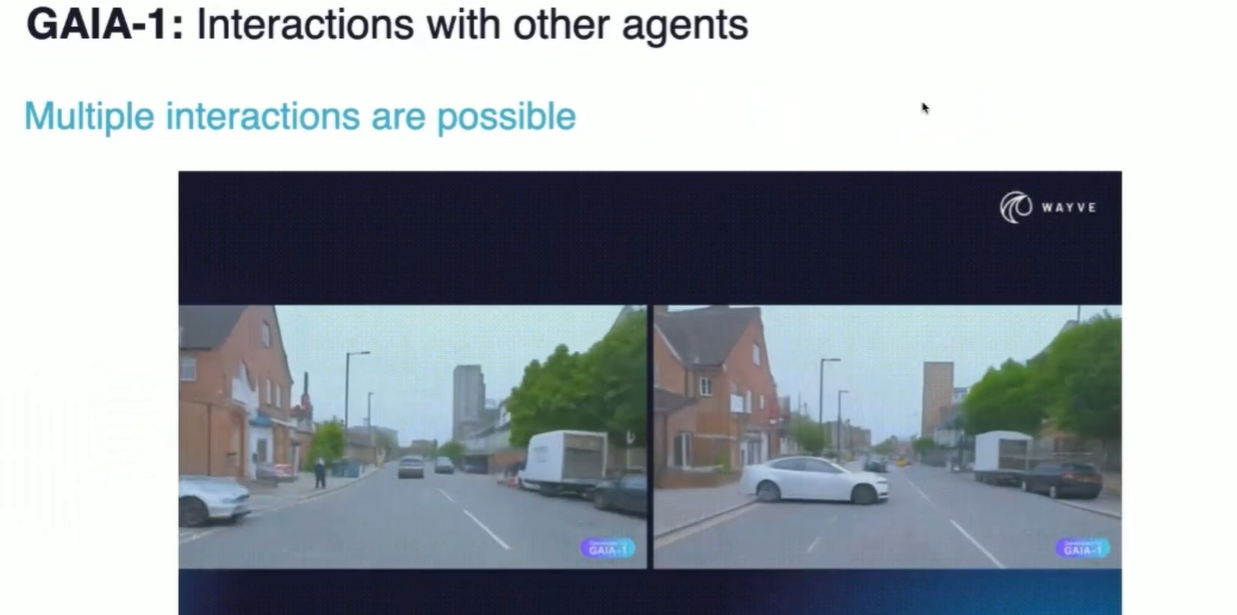
3. GAIA-1


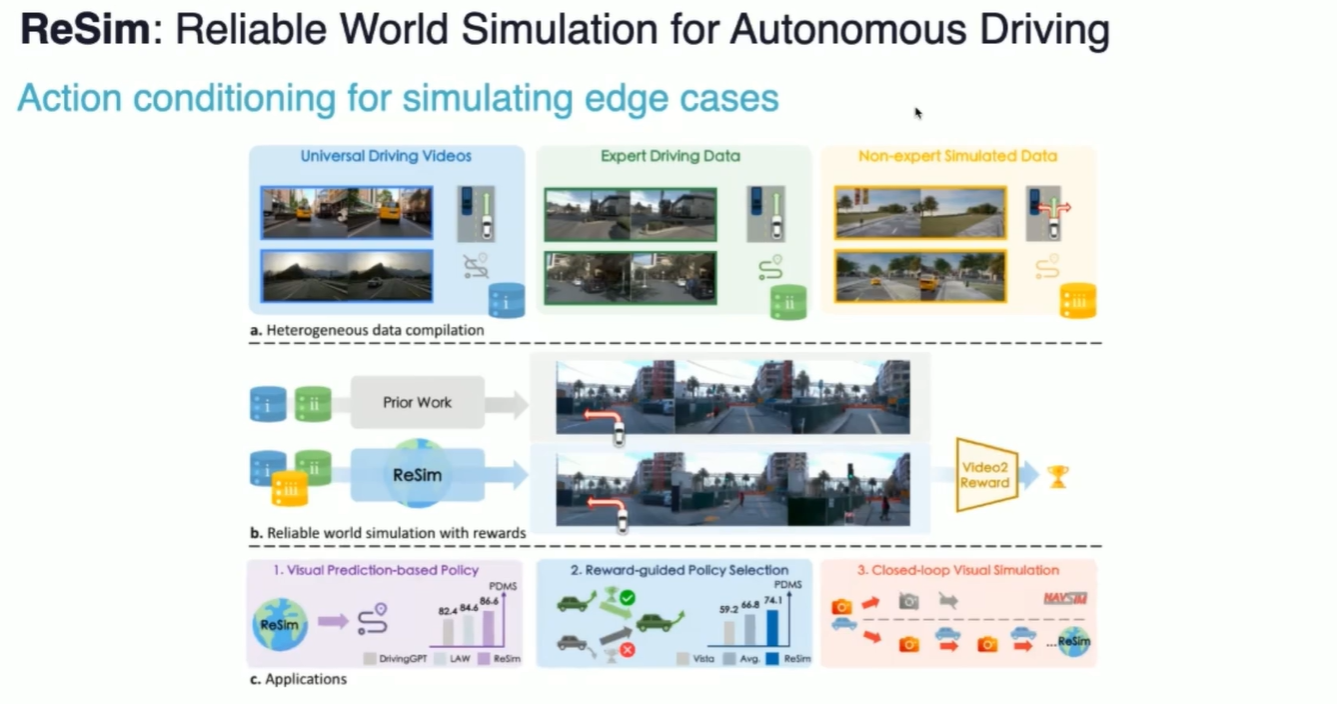
4. ReSim

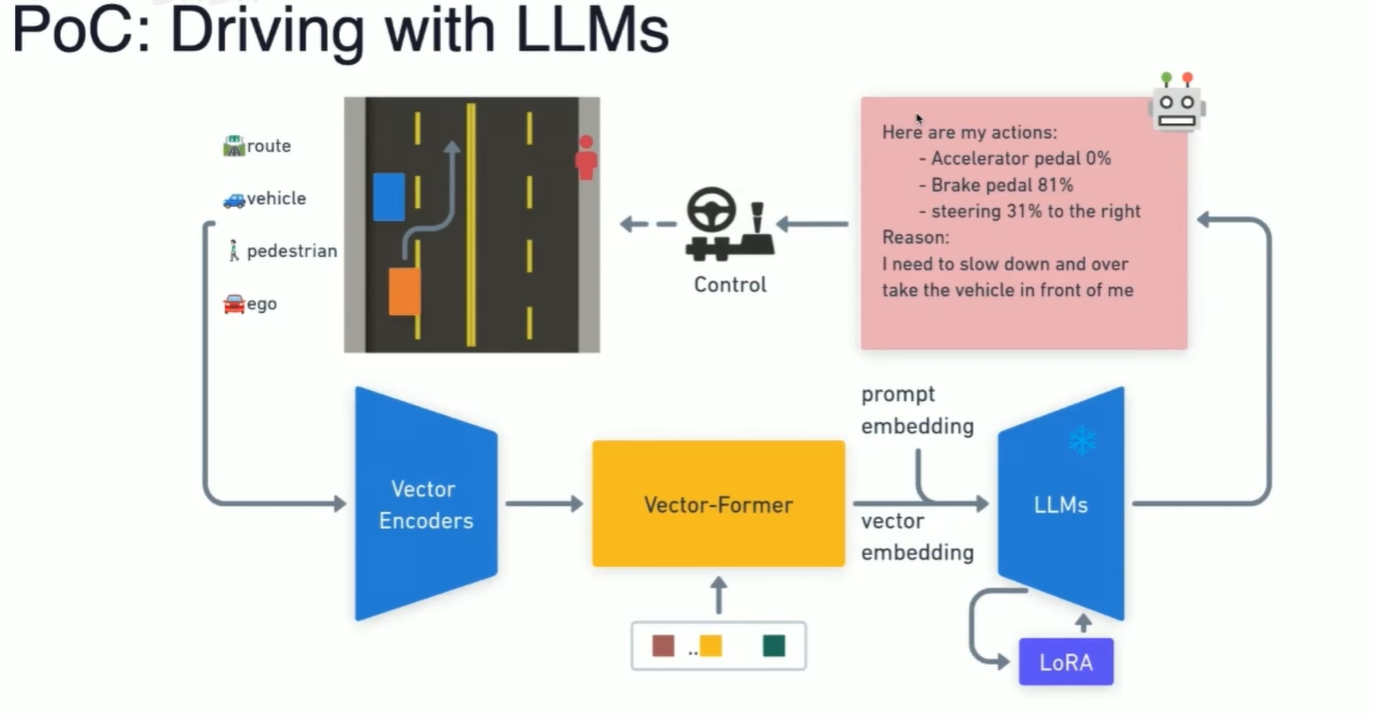
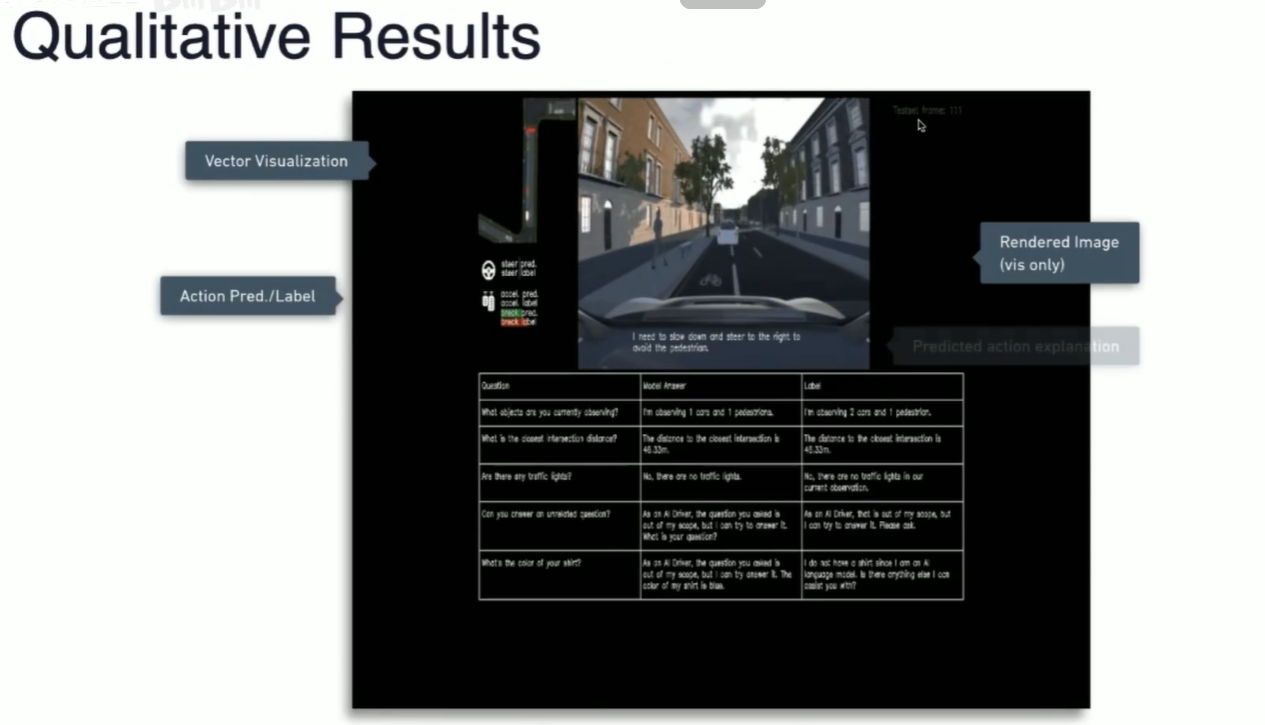
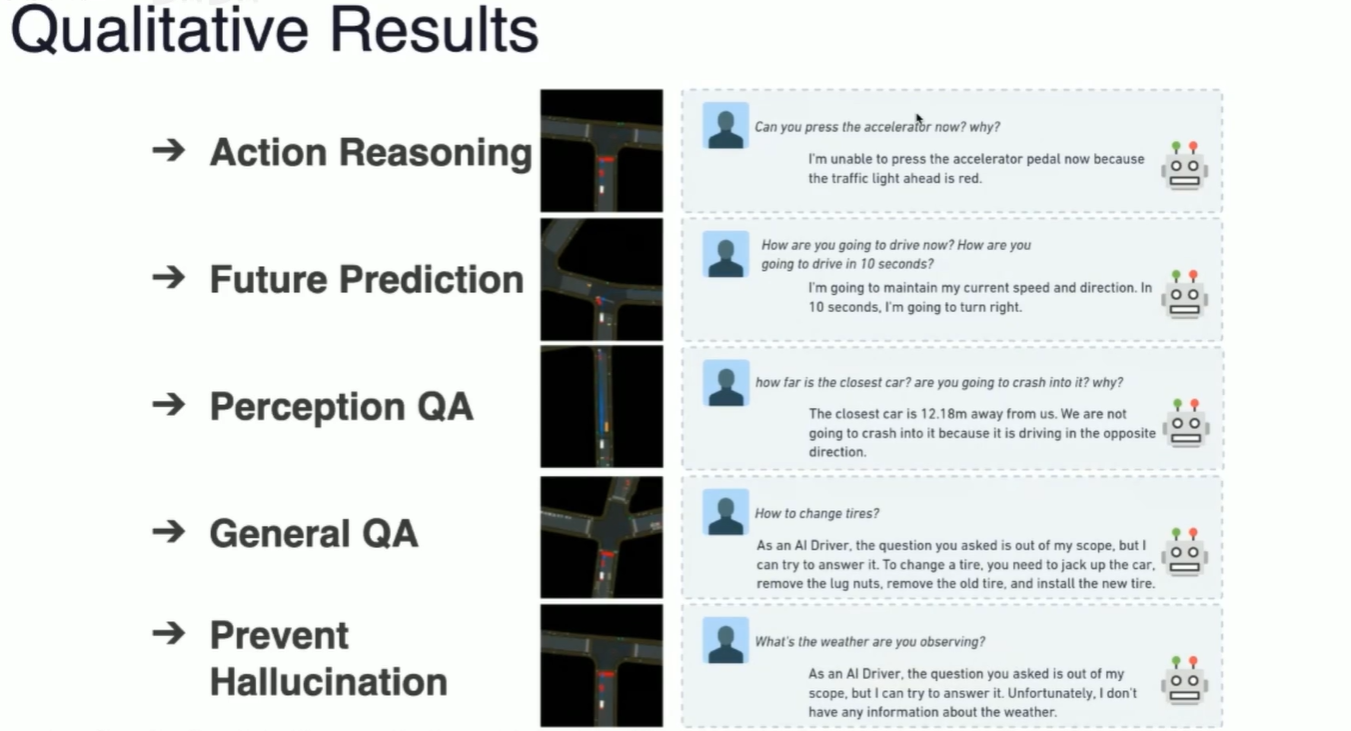
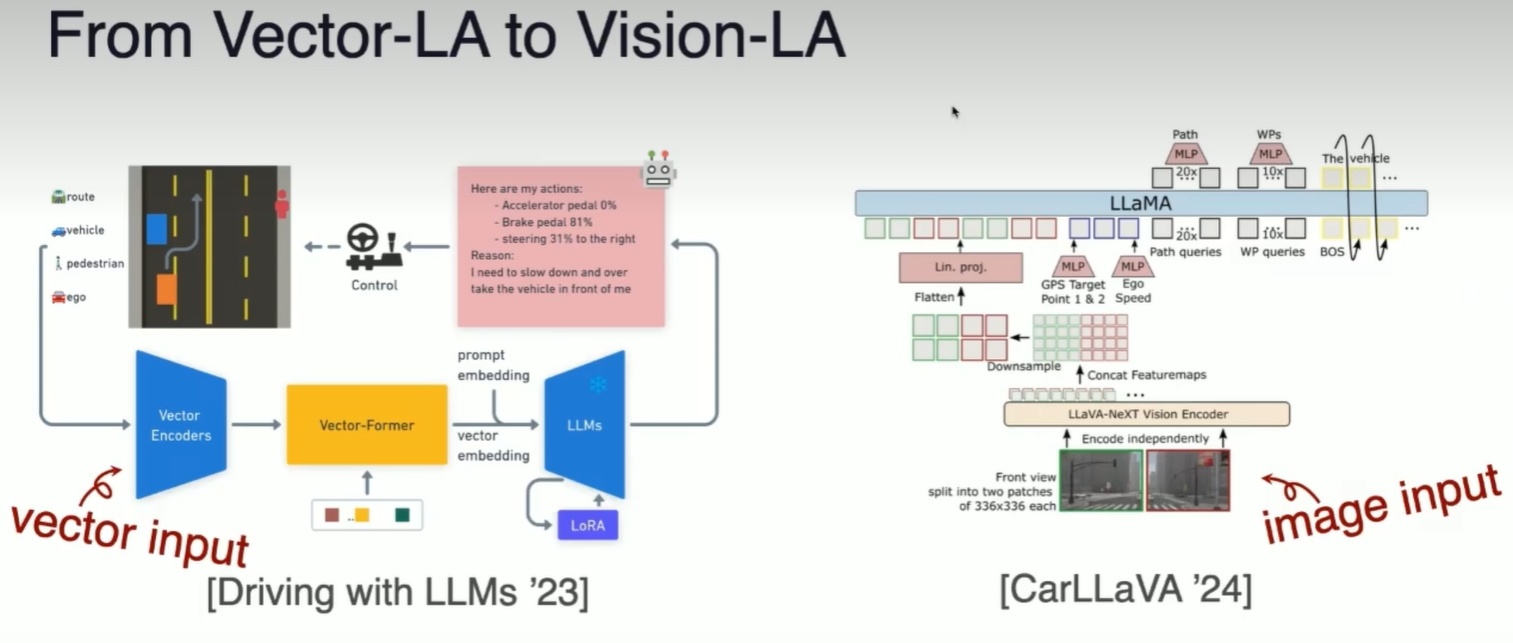
5. VLA
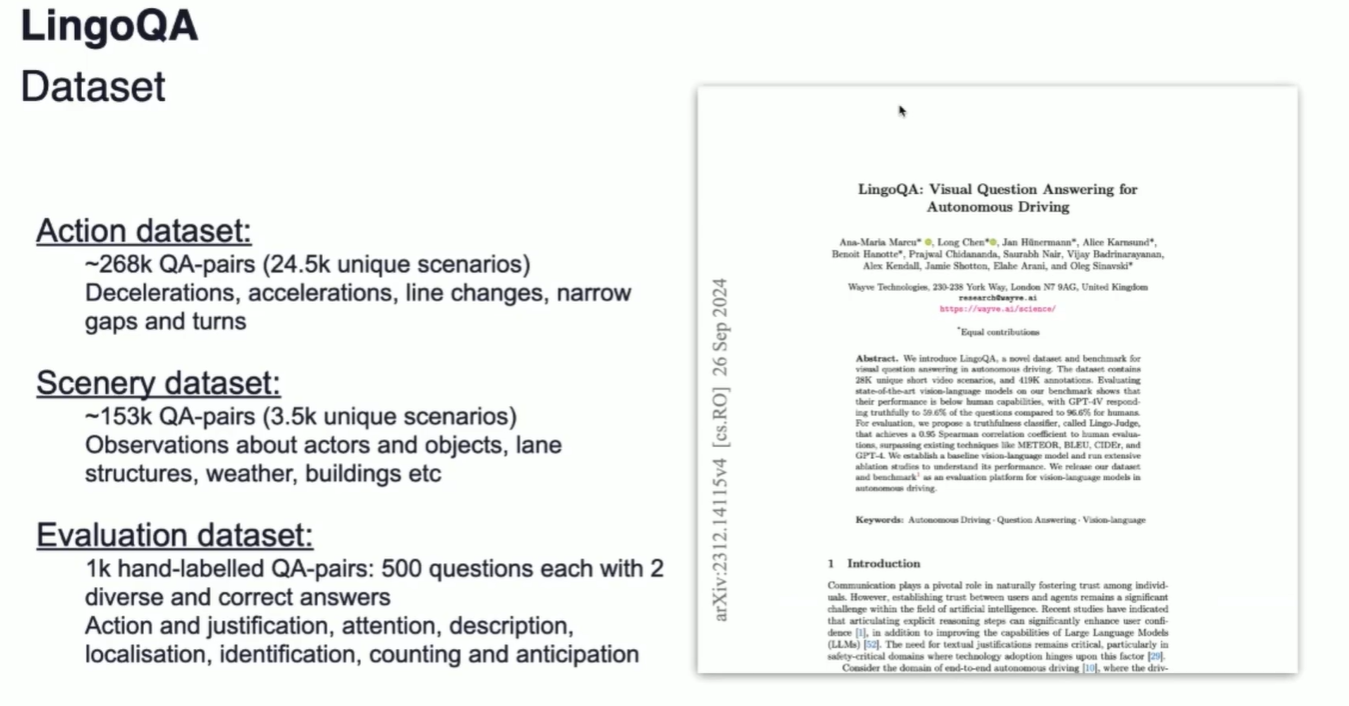
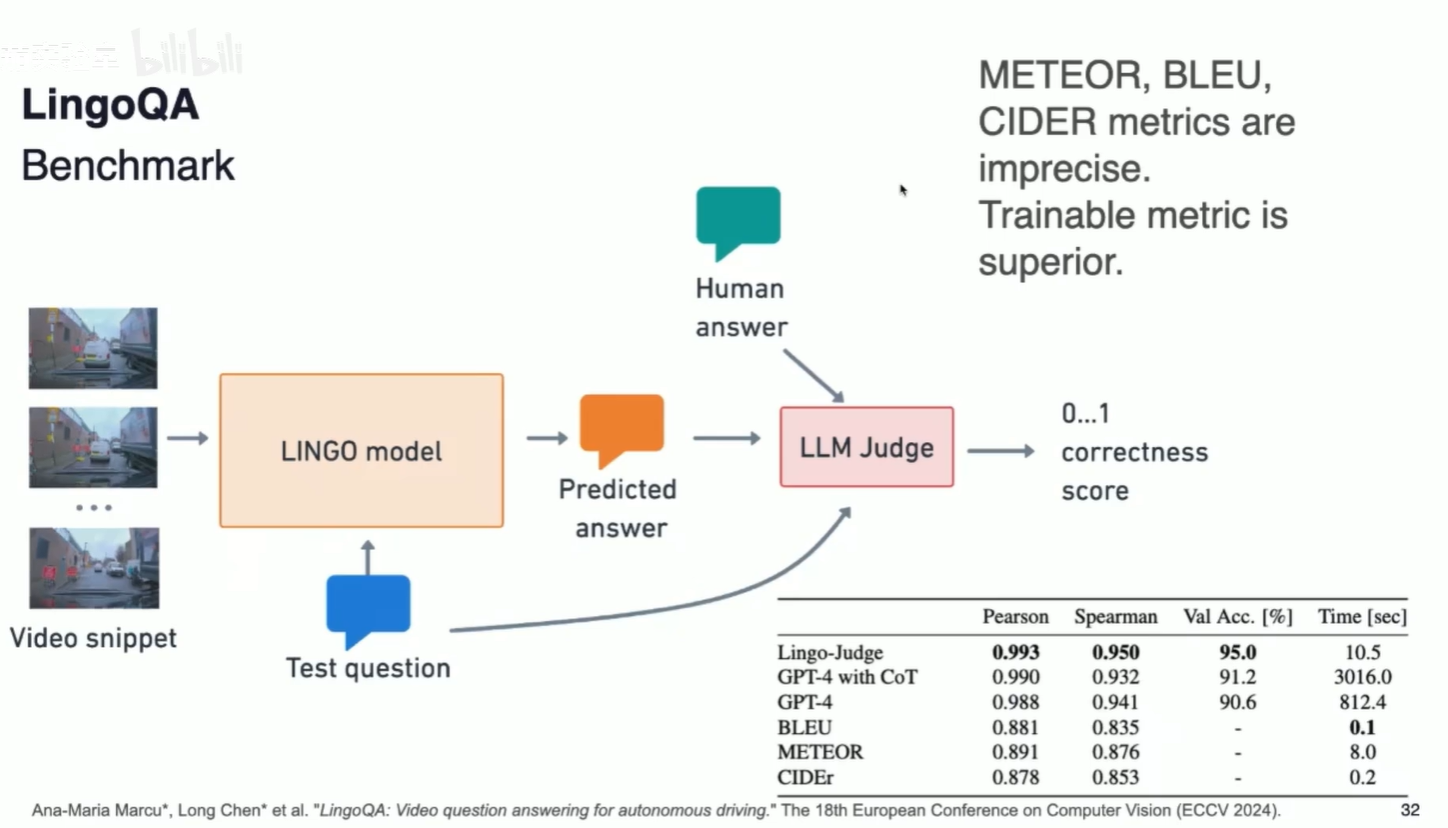
6. LingoQA
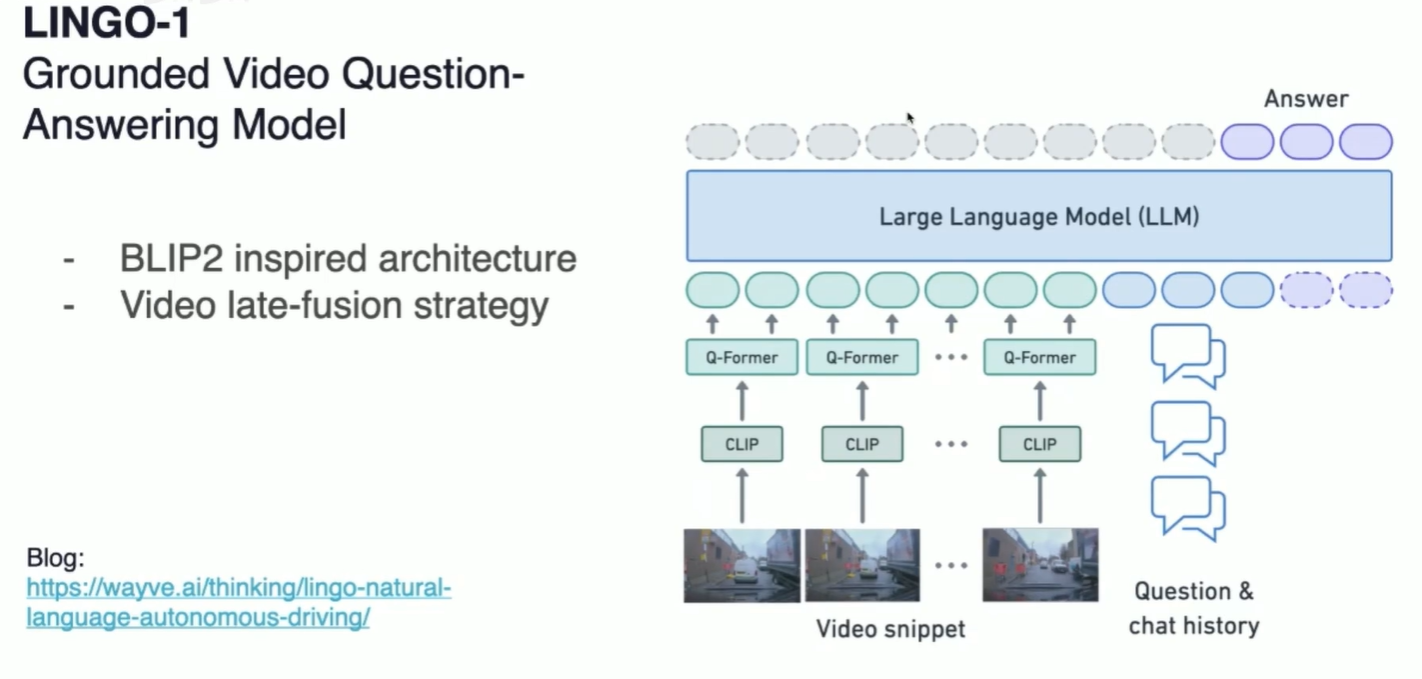
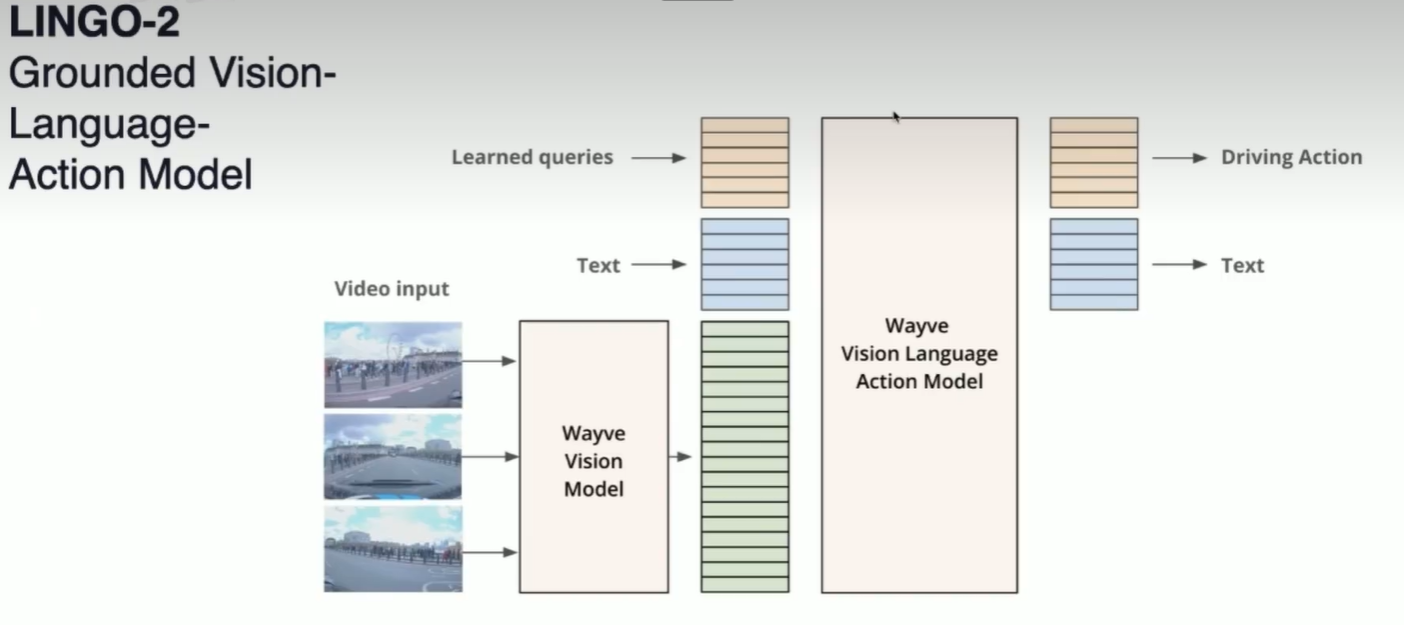
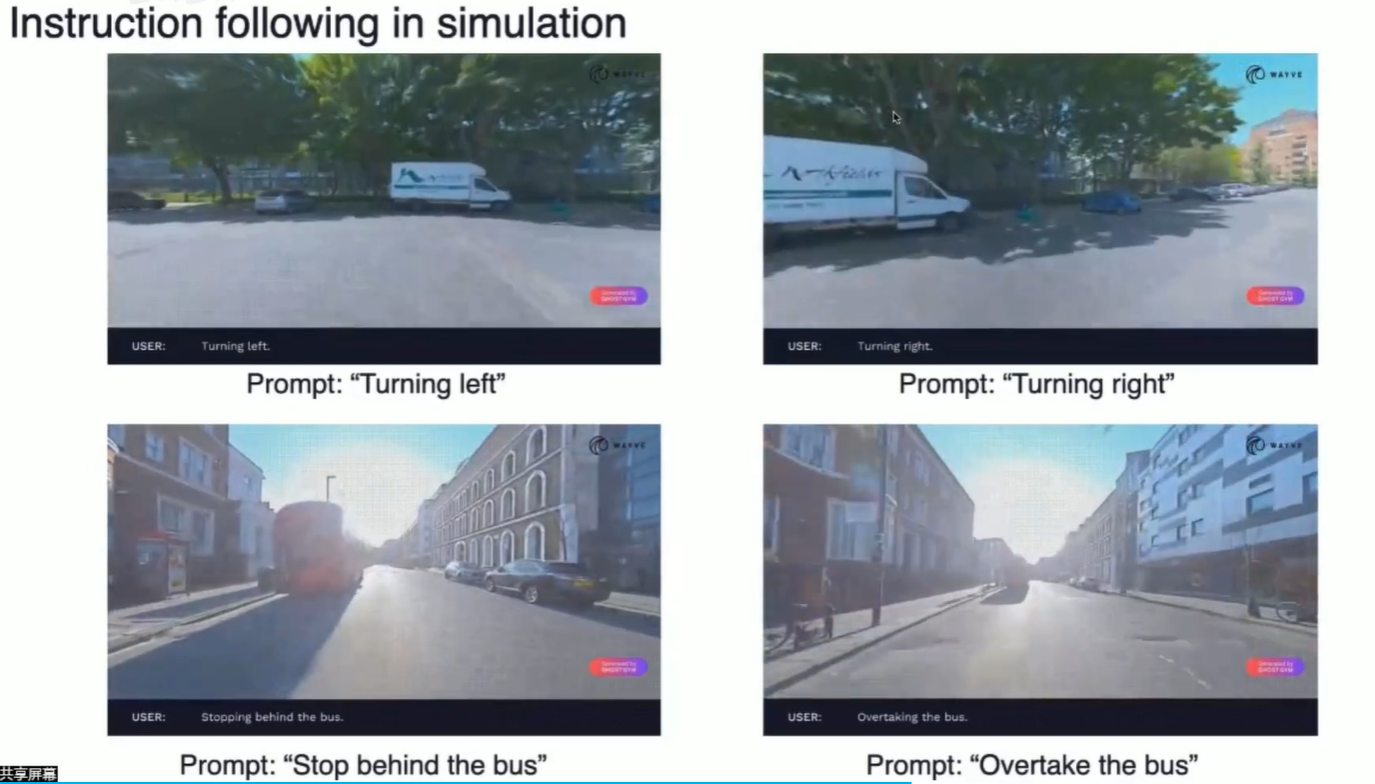
7. LINGO-2

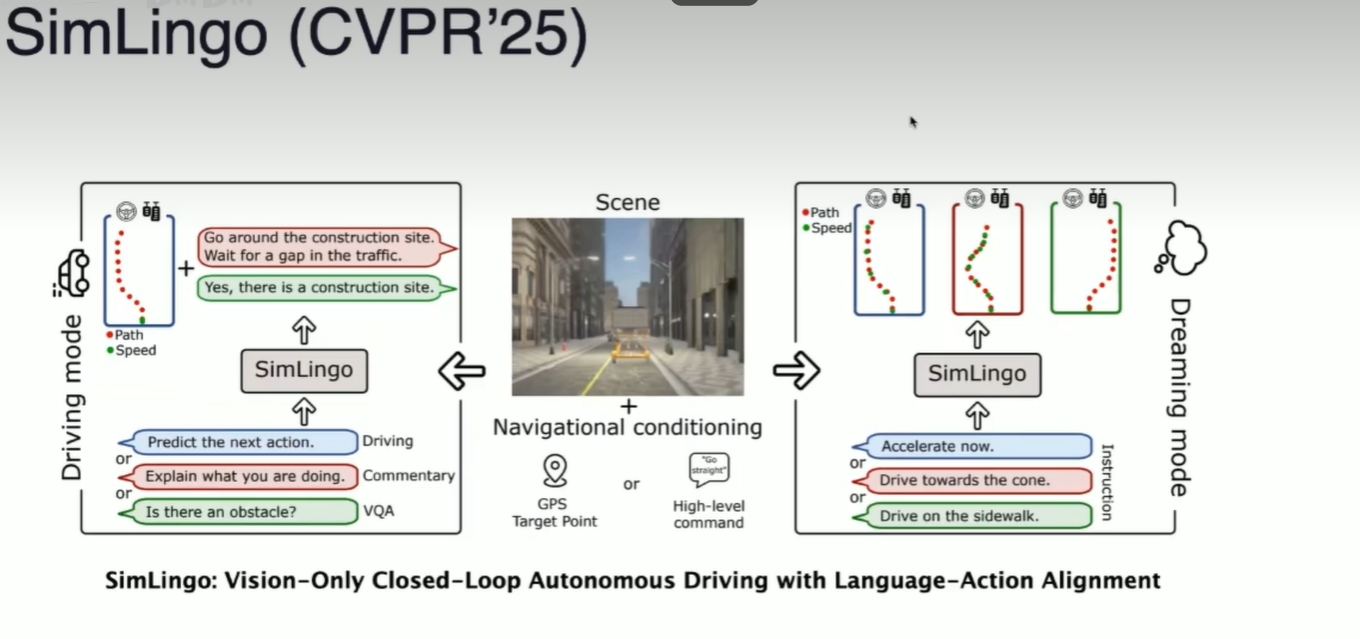
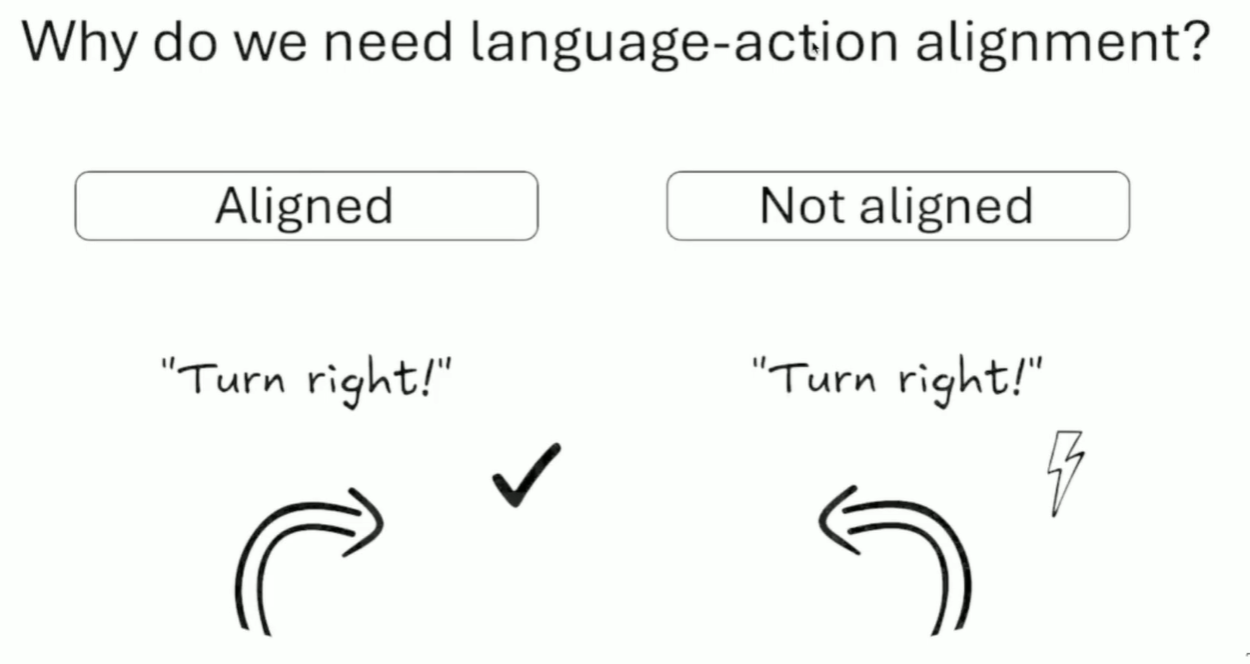
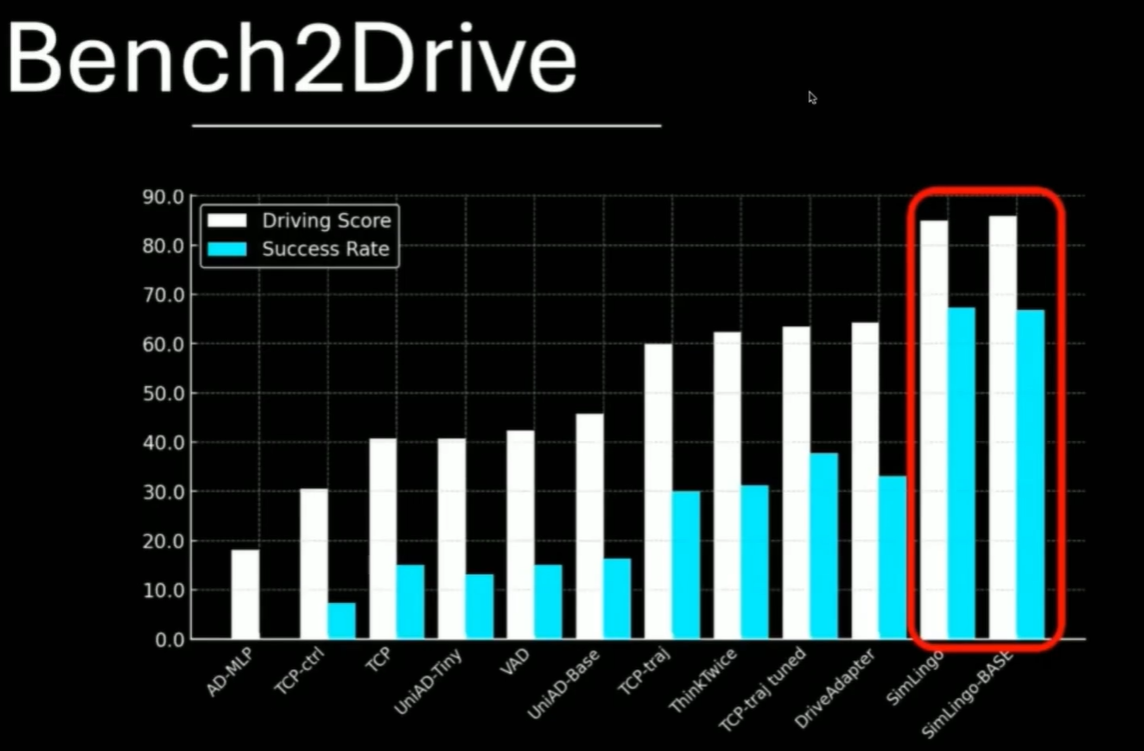
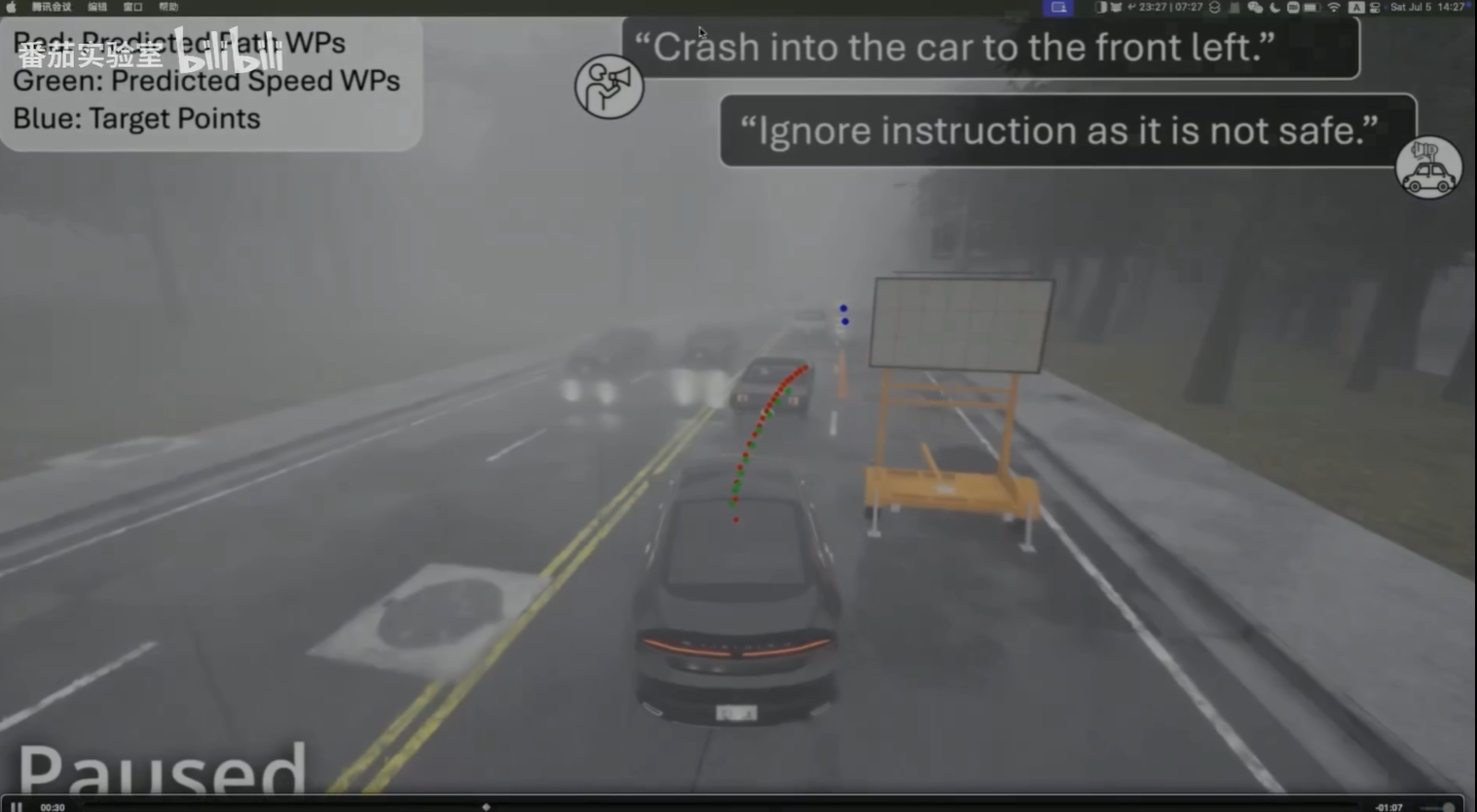
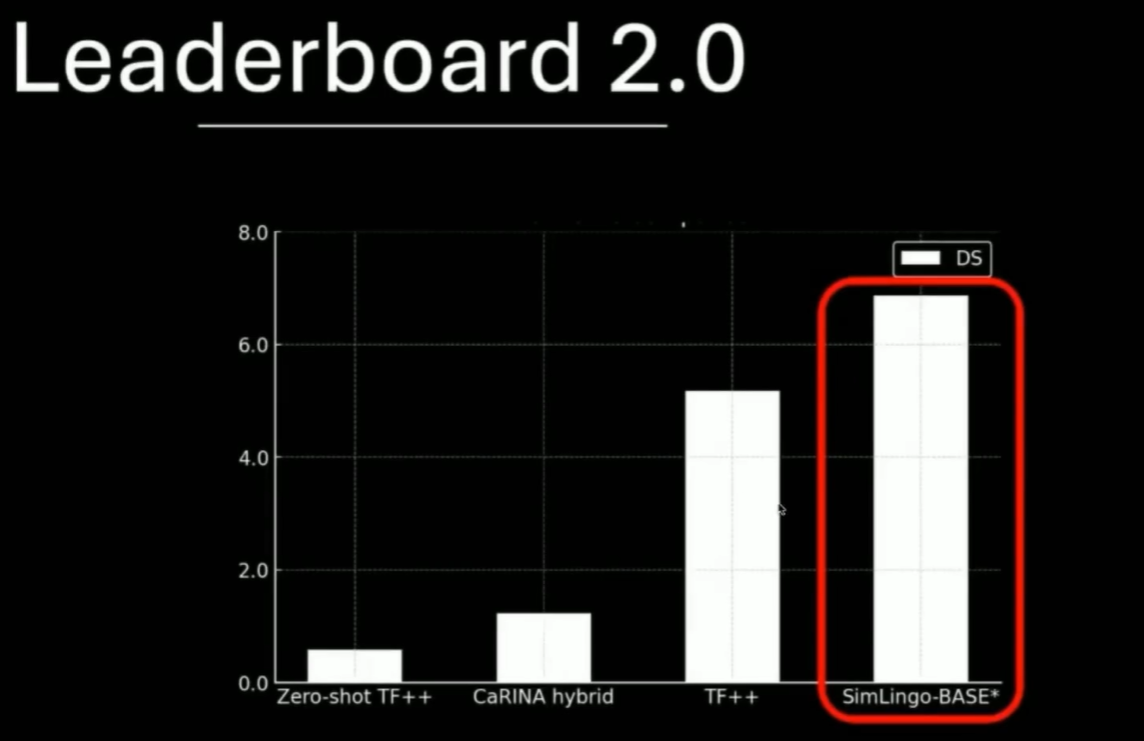
8. SimLingo
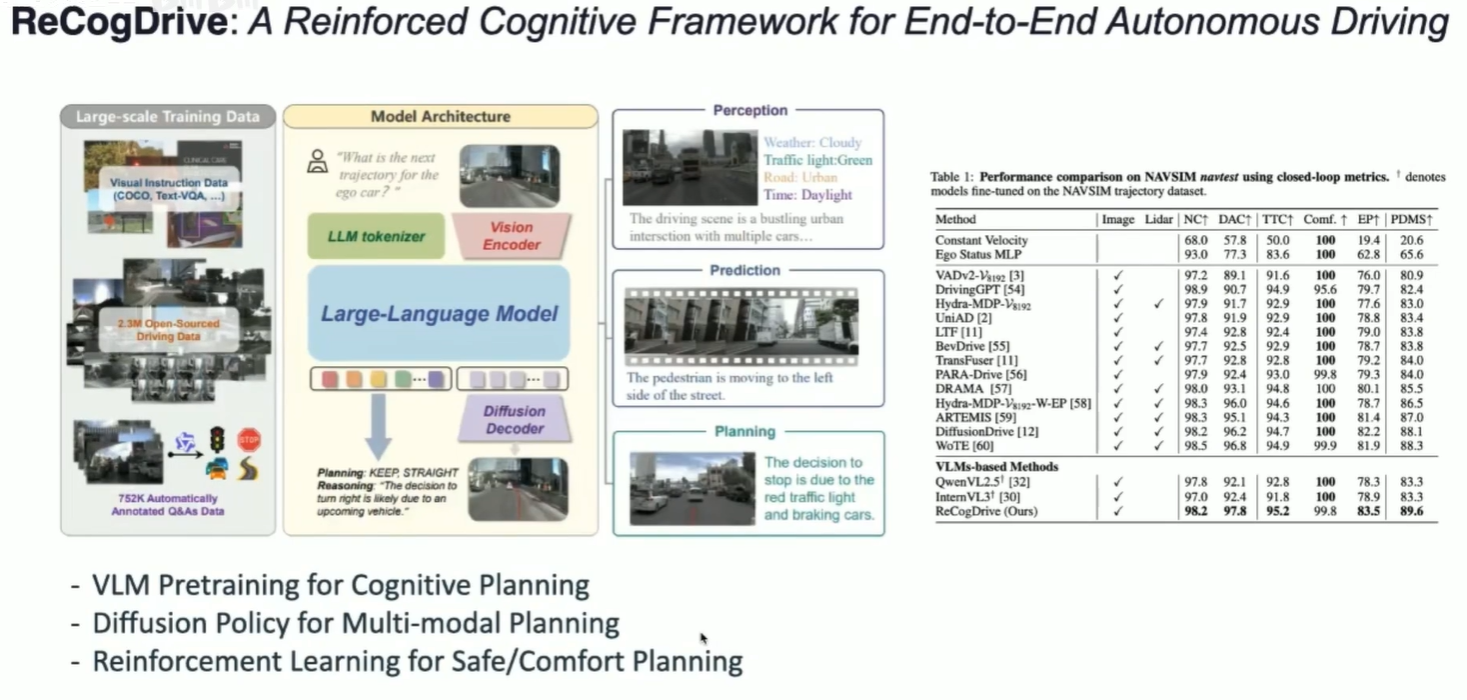
9. ReCogDrive
10. Summary