文章目录
- 1.软件准备
-
- [1.1 获取软件安装包](#1.1 获取软件安装包)
- [1.2 配置运行环境](#1.2 配置运行环境)
- 2.软件使用
-
- [2.1 相机列表](#2.1 相机列表)
- [2.2 Windows环境设置动态IP](#2.2 Windows环境设置动态IP)
-
- [2.2.1 更改电脑网络适配器IP](#2.2.1 更改电脑网络适配器IP)
- [2.2.2 看图软件设置动态IP](#2.2.2 看图软件设置动态IP)
- [2.3 Windows环境设置静态IP](#2.3 Windows环境设置静态IP)
-
- [2.3.1 电脑网络适配器设置静态IP](#2.3.1 电脑网络适配器设置静态IP)
- [2.3.2 看图软件设置静态IP](#2.3.2 看图软件设置静态IP)
- [2.4 连接/断开相机](#2.4 连接/断开相机)
- [3 相机页面---简易操作](#3 相机页面---简易操作)
-
- [3.1 数据流](#3.1 数据流)
-
- [3.1.1 深度](#3.1.1 深度)
- [3.1.2 彩色](#3.1.2 彩色)
- [3.1.3 左图](#3.1.3 左图)
- [3.1.4 右图](#3.1.4 右图)
- [3.1.5 散斑投射器(激光器)](#3.1.5 散斑投射器(激光器))
- [3.2 采图模式](#3.2 采图模式)
-
- [3.2.1 最大帧率连续](#3.2.1 最大帧率连续)
- [3.2.2 固定帧率连续](#3.2.2 固定帧率连续)
- [3.2.3 硬件信号触发](#3.2.3 硬件信号触发)
- [3.2.4 软件信号触发](#3.2.4 软件信号触发)
- [3.3 深度引擎](#3.3 深度引擎)
-
- [3.3.1 高精度模式](#3.3.1 高精度模式)
- [3.3.2 普通模式](#3.3.2 普通模式)
- [3.4 用户配置管理](#3.4 用户配置管理)
-
- [3.4.1 保存当前用户配置](#3.4.1 保存当前用户配置)
- [3.4.1 更新当前用户配置](#3.4.1 更新当前用户配置)
- [3.4.3 设置启动时用户配置](#3.4.3 设置启动时用户配置)
- [3.4.4 恢复默认设置](#3.4.4 恢复默认设置)
- [3.5 算法参数](#3.5 算法参数)
-
- [3.5.1 填充空洞](#3.5.1 填充空洞)
- [3.5.2 斑点滤波](#3.5.2 斑点滤波)
- 4.相机页面---高级参数
-
- [4.1 通用属性](#4.1 通用属性)
-
- [4.1.1 帧率设置](#4.1.1 帧率设置)
- [4.1.2 Device Control---错误码](#4.1.2 Device Control—错误码)
- [4.1.3 Device Control---相机版本和固件信息](#4.1.3 Device Control---相机版本和固件信息)
- [4.1.4 Device Control---设备链接](#4.1.4 Device Control---设备链接)
- [4.1.5 Transport Layer Control---IP参数](#4.1.5 Transport Layer Control---IP参数)
- [4.1.6 Transport Layer Control---SCPD/GVCP](#4.1.6 Transport Layer Control—SCPD/GVCP)
- [4.1.7 触发模式](#4.1.7 触发模式)
- [4.2 深度图属性](#4.2 深度图属性)
-
- [4.2.1 SGBM属性](#4.2.1 SGBM属性)
-
- [4.2.1.1 精度相关SGBM参数](#4.2.1.1 精度相关SGBM参数)
- [4.2.2.2 测量范围相关SGBM参数](#4.2.2.2 测量范围相关SGBM参数)
- [4.2.2.3 帧率相关SGBM参数](#4.2.2.3 帧率相关SGBM参数)
- [4.2.2.4 边缘像素平滑处理相关的的SGBM 参数](#4.2.2.4 边缘像素平滑处理相关的的SGBM 参数)
- [4.2.2.5 与误匹配相关的SGBM参数](#4.2.2.5 与误匹配相关的SGBM参数)
- [4.2.2 纹理滤波](#4.2.2 纹理滤波)
- [4.2.3 饱和度滤波](#4.2.3 饱和度滤波)
- [4.3 Texture(彩色)属性](#4.3 Texture(彩色)属性)
- [4.4 左IR属性](#4.4 左IR属性)
- [4.5 右IR属性](#4.5 右IR属性)
- [4.6 激光器属性](#4.6 激光器属性)
- [4.7 相机温度](#4.7 相机温度)
- 5.流程操作
-
- [5.1 相机调参技巧](#5.1 相机调参技巧)
- [5.2 查看与调整视图](#5.2 查看与调整视图)
-
- [5.2.1 查看深度值](#5.2.1 查看深度值)
- [5.2.2 渲染范围调节方法](#5.2.2 渲染范围调节方法)
- [5.2.3 调节深度图渲染效果](#5.2.3 调节深度图渲染效果)
- [5.2.4 调整点云视图](#5.2.4 调整点云视图)
- [5.3 保存图像](#5.3 保存图像)
-
- [5.3.1 存图设置](#5.3.1 存图设置)
- [5.3.2 保存图片](#5.3.2 保存图片)
- [5.3.3 单张存图](#5.3.3 单张存图)
- [5.3.4 连续存图](#5.3.4 连续存图)
- 6.常见问题FAQ
-
- [6.1 新版本软件双击无反应](#6.1 新版本软件双击无反应)
- [6.2 状态码显示为"-1016"](#6.2 状态码显示为“-1016”)
- [6.3 修改 IP 后提示"IP设置失败:Timeout"?](#6.3 修改 IP 后提示“IP设置失败:Timeout”?)
- 6.4.连接相机后,`相机参数`界面部分组件不显示?
- 7.参考资料
1.软件准备
1.1 获取软件安装包
当前软件处于未放置到官网,最新版本需通过图漾技术获取。
1.2 配置运行环境
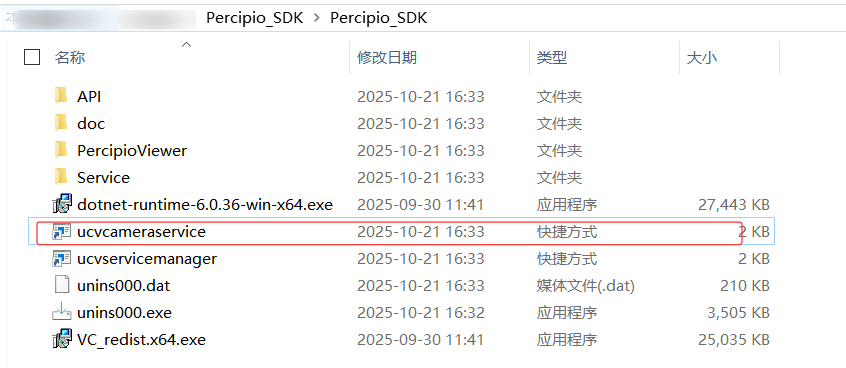
1.新版Percipio Viewer当前仅支持 Windows10/11 64位系统。
2.运行软件前,请确保已安装 .NET 6运行时。若未安装,请在软件安装包内双击 dotnet-runtime-6.0.36- win-x64.exe,完成安装。
2.软件使用
2.1 相机列表
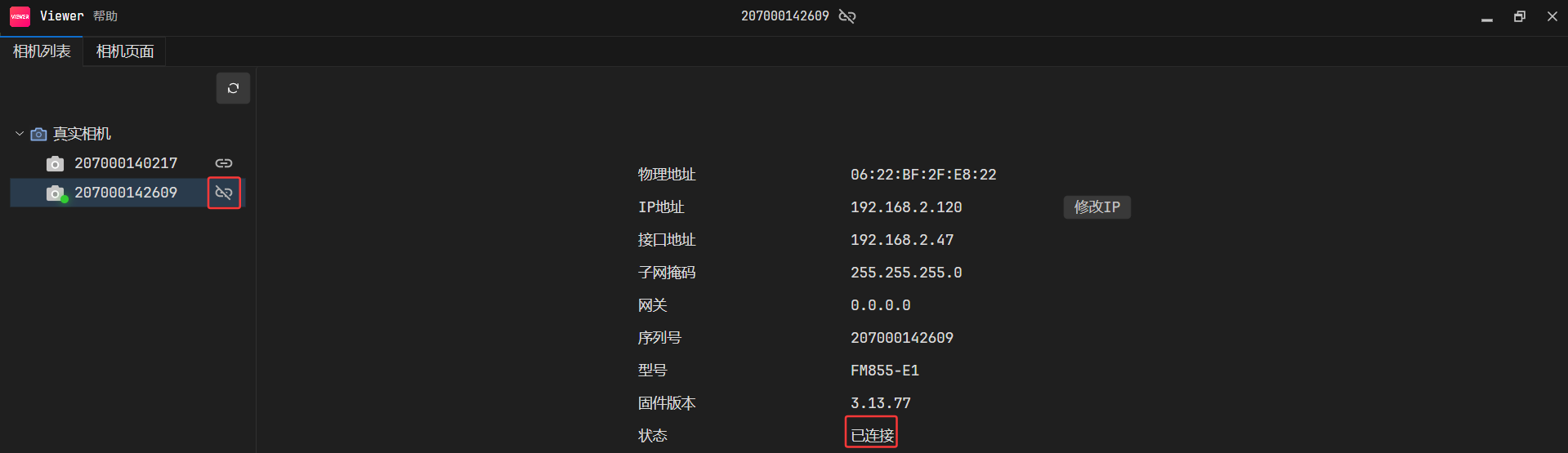
启动 Percipio Viewer,进入相机列表界面:
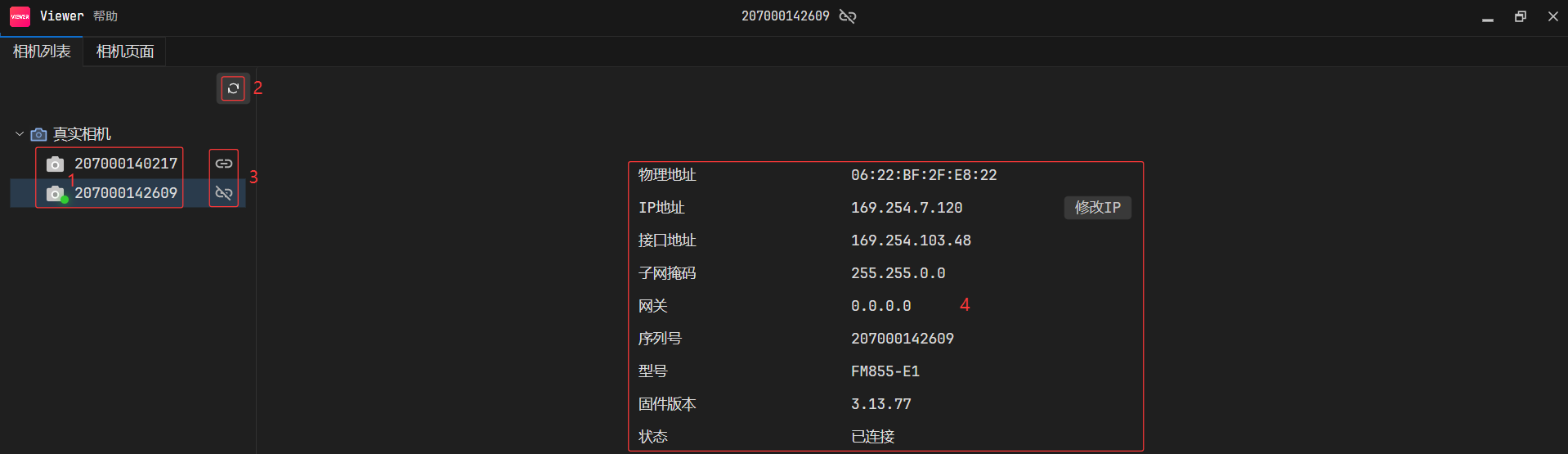
相机列表界面
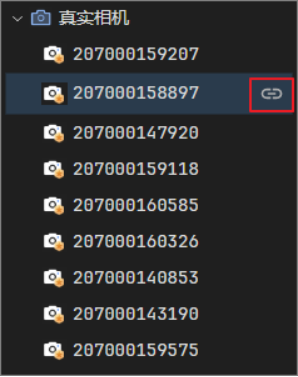
1.显示当前找到的所有相机的序列号。
2.刷新设备列表。
3.表示相机可连接。单击该图标即可连接相机。
4.在设备列表中点击相机序列号,相机信息区会显示该相机的详细信息。另外,通过IP地址右侧的修改IP 按钮
2.2 Windows环境设置动态IP
2.2.1 更改电脑网络适配器IP
首先需要将电脑适配器的IP改为自动获取IP,详细操作步骤如下:
2.2.2 看图软件设置动态IP
之后打开新的看图软件后,枚举出来相机相机,之后点击"修改IP "

之后再选择 "DHCP ",点击 "确定 "
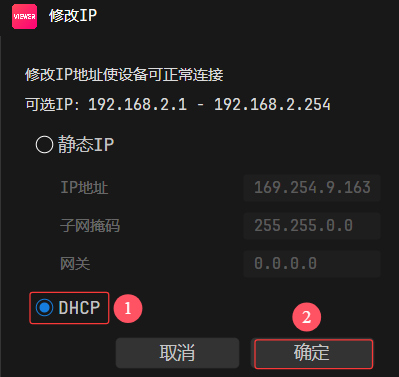
动态IP设置
弹出以下提示 对话框,表示 IP 设置成功。
IP设置成功
2.3 Windows环境设置静态IP
2.3.1 电脑网络适配器设置静态IP
首先需要将电脑适配器的IP改为静态IP,详细操作步骤如下:
2.3.2 看图软件设置静态IP
首先打开新的看图软件后,枚举出来相机相机,之后点击"修改IP "

而设置IP界面如下:
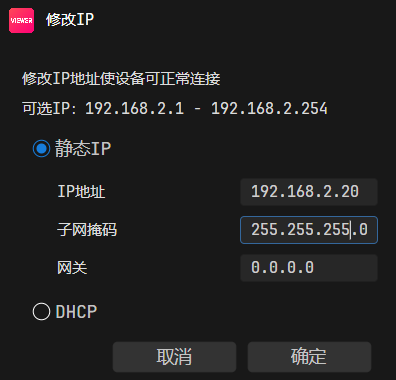
静态IP设置
1.选择 "静态IP "。
2.根据界面提示设置 "IP地址 "、"子网掩码 " 和 "网关 "
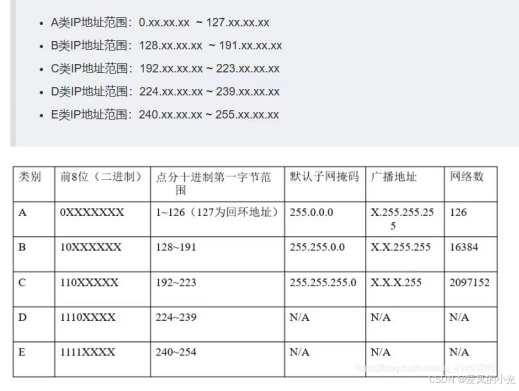
IP地址分类
2.4 连接/断开相机
在相机列表 中,按照如下操作连接相机:
单击 此处是打开相机,再次单击,即恢复待链接状态,正常链接如下图所示:
3 相机页面---简易操作
在设备列表中点 连接相机后,自动跳转至 相机页面。
连接相机后,自动跳转至 相机页面。
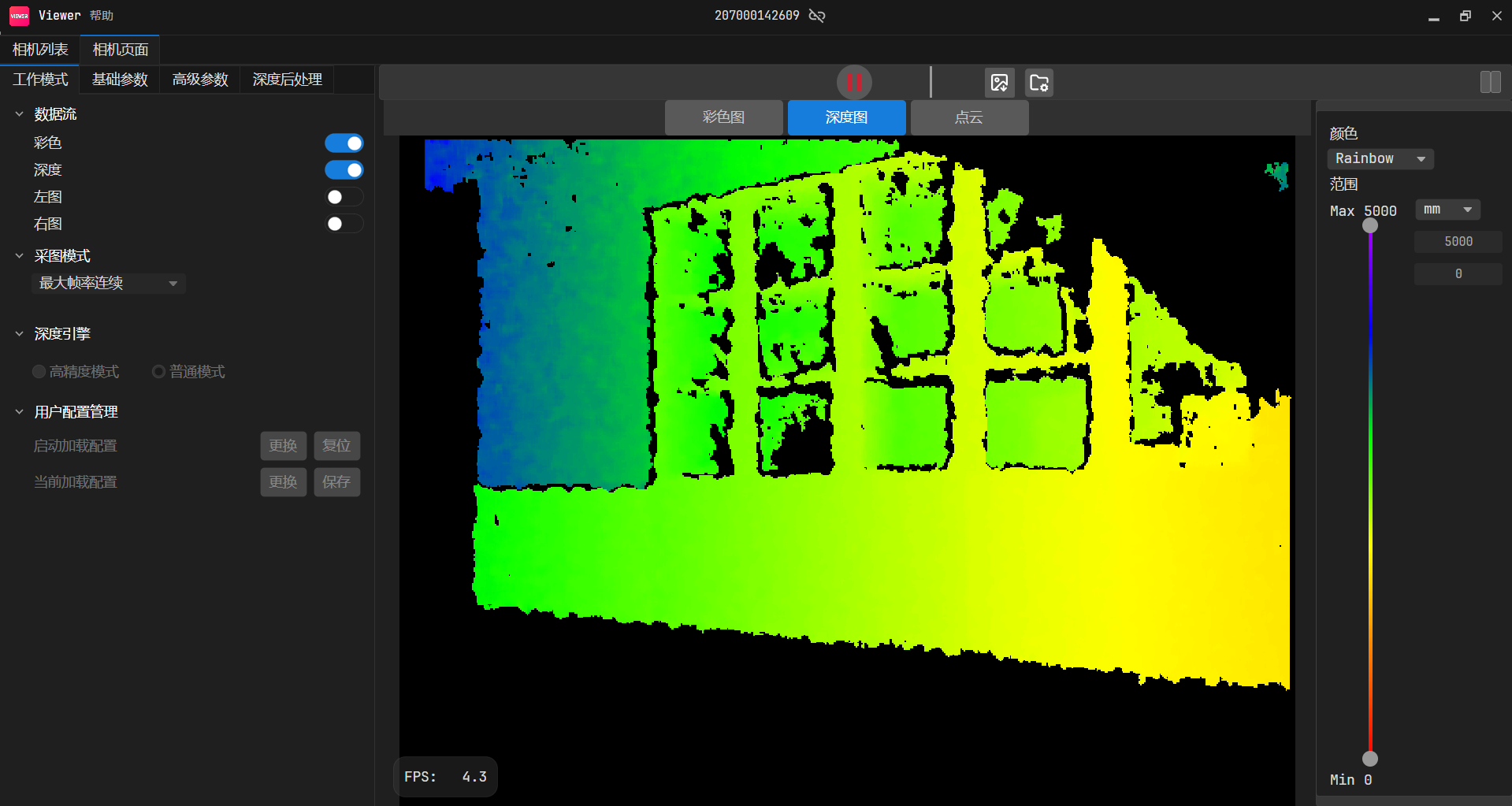
相机界面
3.1 数据流
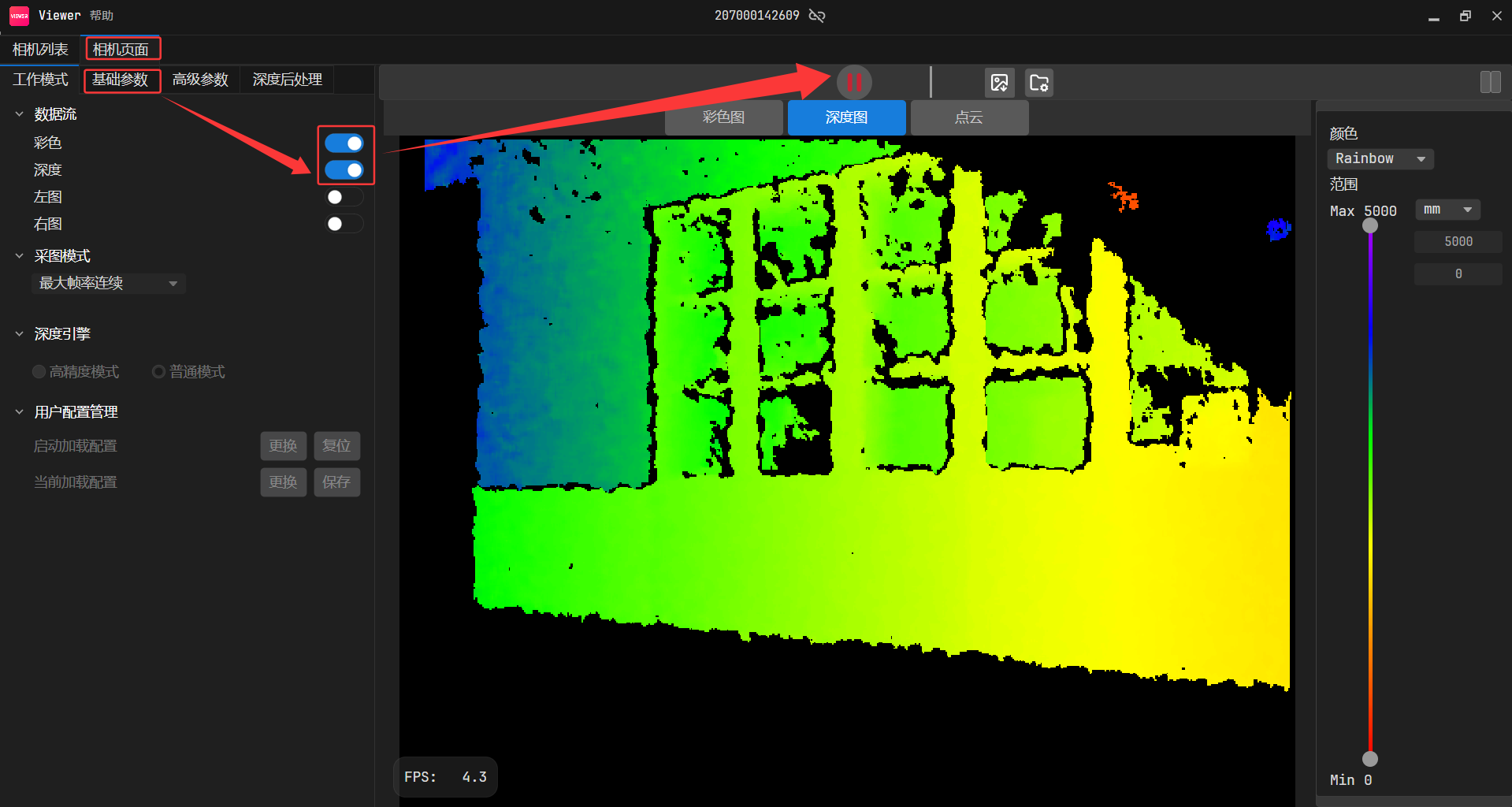
使能 "彩色" 数据流后,图像采集区会显示彩色图视图。
使能 "深度" 数据流后,图像采集区会显示深度图和点云视图。
使能**"左IR"/ "右IR"** 数据流后,图像采集区会显示 IR 视图,左IR和右IR图都显示在 IR 视图中。
3.1.1 深度
| 组件名称 | 参数及描述 |
|---|---|
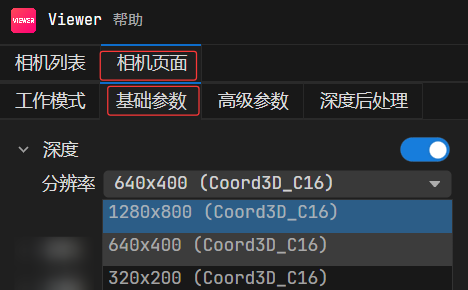
| 深度 | 1. 点击使能相应组件。2. 分辨率:设置图像分辨率和图像格式。停止采集图像时可设置。 |
注1 :采图过程中,无法打开/关闭取图开关,请先停止采图再操作。
注2:不同相机的分辨率可能不一样
3.1.2 彩色
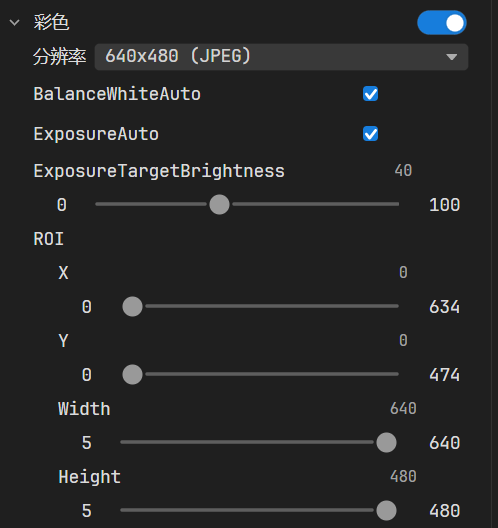
| 组件名称 | 参数及描述 |
|---|---|
| 彩色 | 1. :点击使能相应组件。2. 分辨率:设置图像分辨率和图像格式。停止采集图像时可设置。 |
注:不同相机属性范围值不一样哦
3.1.3 左图
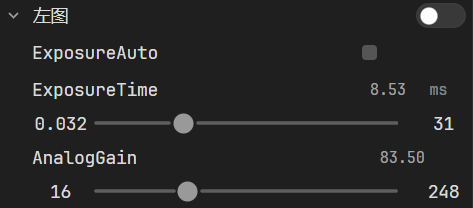
| 数据流 | 参数及描述 |
|---|---|
| 左图 | 1.点击使能相应组件 2. 设置模拟增益 |
注:不同相机属性范围值不一样哦
3.1.4 右图
| 数据流 | 参数及描述 |
|---|---|
| 右图 | 1.点击使能相应组件 2. 设置模拟增益 |
注:不同相机属性范围值不一样哦
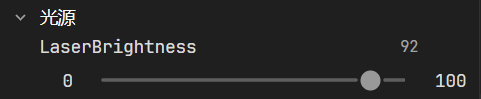
3.1.5 散斑投射器(激光器)
3.2 采图模式

相机采图模式
3.2.1 最大帧率连续
,将采图模式 设置为'"最大帧率连续 ",之后在相机参数 页面打开取图开关,使能相应数据流即可。
3.2.2 固定帧率连续
待补充
3.2.3 硬件信号触发
3.2.4 软件信号触发
3.3 深度引擎
3.3.1 高精度模式
使用此模式,成像质量会更好,但是帧率会适当降低。
3.3.2 普通模式
默认出图方式,帧率和图像质量均衡模式。
3.4 用户配置管理
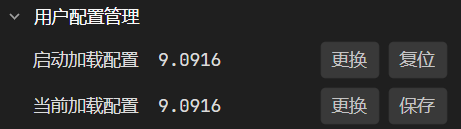
3.4.1 保存当前用户配置
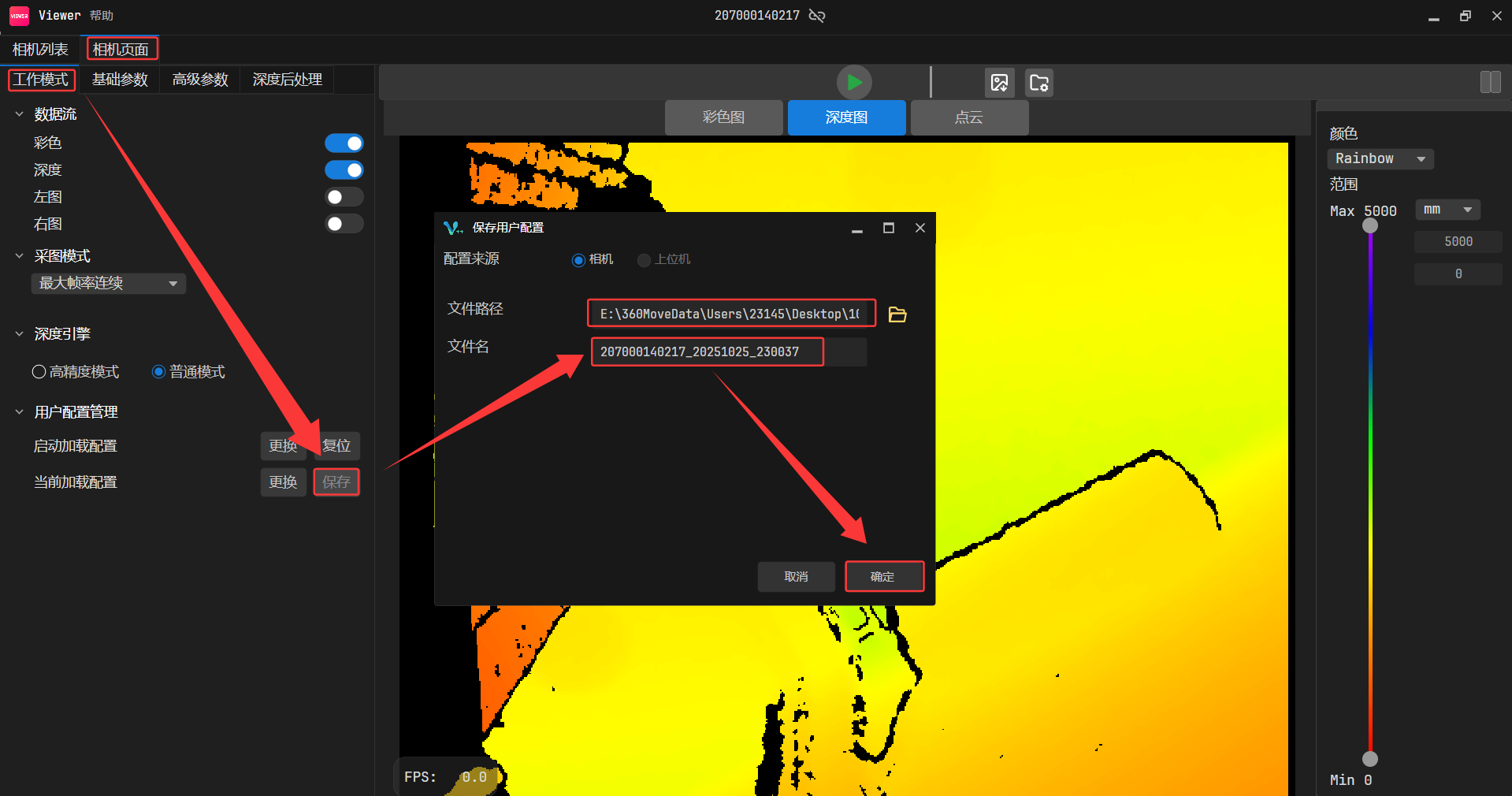
3.4.1 更新当前用户配置
待补充
3.4.3 设置启动时用户配置
待补充
3.4.4 恢复默认设置
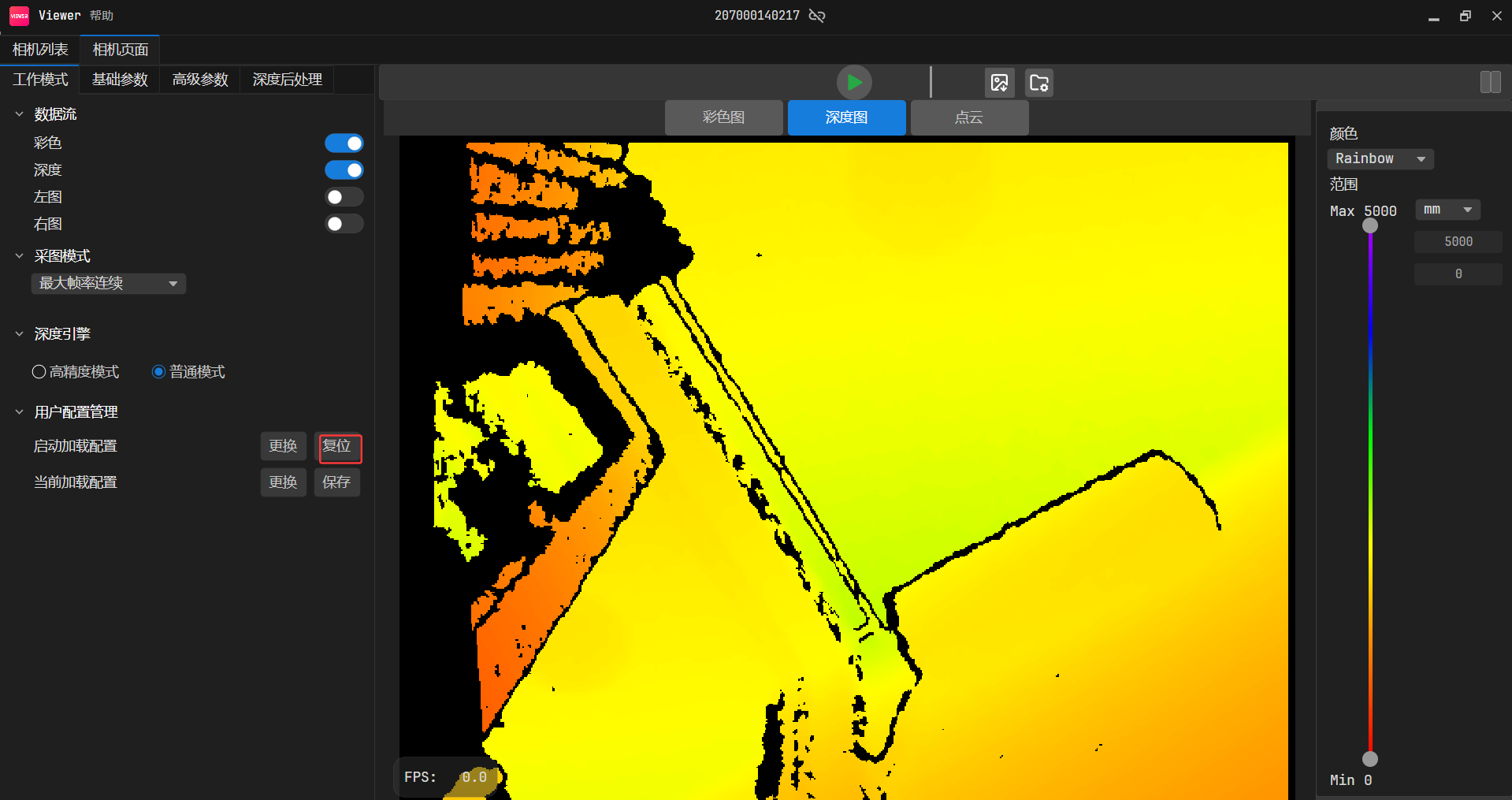
恢复出厂设置
3.5 算法参数
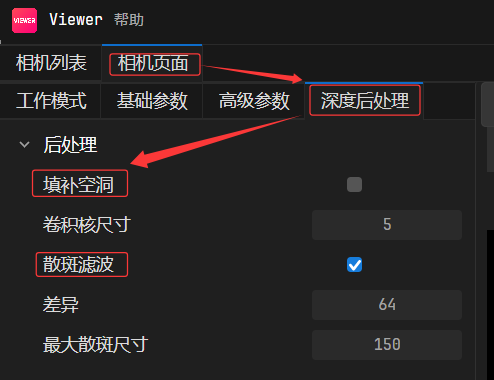
3.5.1 填充空洞
该功能是软件层面的后处理,可填补缺失的深度数据。
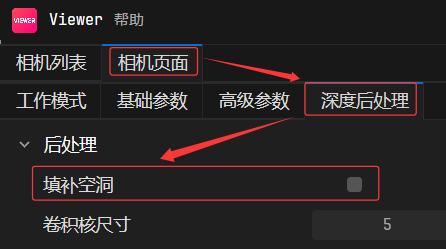
注:若
填充空洞的参数值设置太大,可能会出现深度图失真的现象。
3.5.2 斑点滤波

差异 :若区域中相邻像素的深度差值小于spk diff设定值,则区域内相邻像素属于同一个飞点。
最大散斑尺寸 :若区域中的点云个数小于spk size设定值,则将该区域的点云视为飞点并去除。
注:建议打开相机后,首先打开散斑滤波开关。
4.相机页面---高级参数
4.1 通用属性
4.1.1 帧率设置

| 帧率设置 | 参数及描述 |
|---|---|
| AcquisitionFrameRateEnable | 该功能开启后,可通过 AcquisitionFrameRate 设定相机的出图帧率。 |
| AcquisitionFrameRate | AcquisitionFrameRate |
注1 :AcquisitionFrameRate参数仅作用于Depth。
注2 .:AcquisitionFrameRate行为,受到DepthSgbmSaturateFilterEnable 和DepthSgbmTextureFilterEnable的影响,单帧模式下开启后处理会让帧率减半。
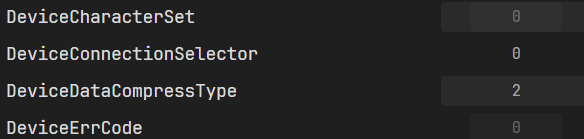
4.1.2 Device Control---错误码
错误码
| 错误码属性 | 参数及描述 |
|---|---|
| DeviceCharacterSet | 设备字符集 |
| DeviceConnectionSelector | 设备连接选择器 |
| DeviceDataCompressType | 设备数据压缩模式 |
| DeviceErrCode | 设备错误代码 |
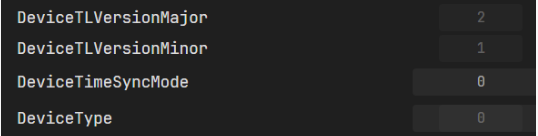
4.1.3 Device Control---相机版本和固件信息
错误码
| 错误码属性 | 参数及描述 |
|---|---|
| DeviceTLVersionMajor | GigeVision 主要版本 |
| DeviceTLVersionMinor | GigeVision 次要版本 |
| DeviceTimeSyncMode | 设备时间同步方式 |
| DeviceType | 设备类型 |
4.1.4 Device Control---设备链接
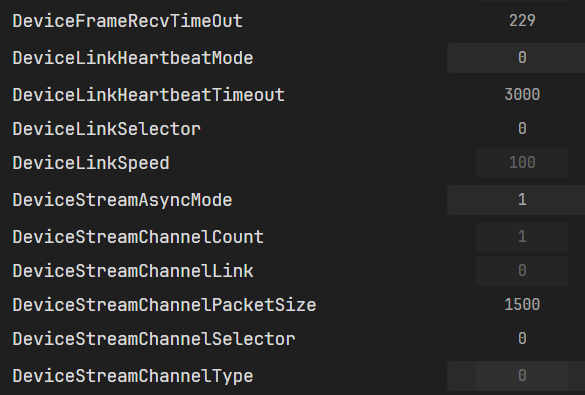
设备连接参数
| 设备连接属性 | 参数及描述 |
|---|---|
| DeviceFrameRecvTime0ut | 帧接收超时时间 |
| DeviceLinkHeartbeatMode | 设备链接心跳模式 |
| DeviceLinkHeartbeatTimeout | 设备链接心跳超时时间 |
| DeviceLinkSelector | 设备链接选择器 |
| DeviceLinkSpeed | 设备链路速度 |
| DeviceStreamAsyncMode | 设备事件通道同步方式 |
| DeviceStreamChannelCount | 设备事件通道计数 |
| DeviceStreamChannelLink | 设备流信道链路 |
| DeviceStreamChannelPacketSize | 设备流通道数据包大小( |
| DeviceStreamChannelSelector | 设备流通道选择器 |
| DeviceStreamChannelType | 设备流通道类型 |
4.1.5 Transport Layer Control---IP参数
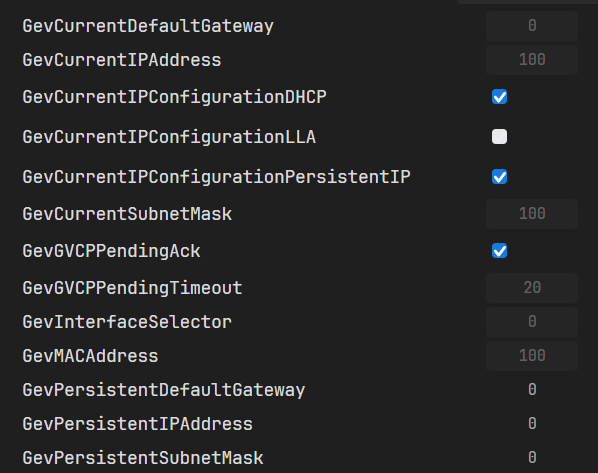
IP参数
| IP属性 | 参数及描述 |
|---|---|
| GevCurrentIPAddress | 相机当前 IP 地址 |
| GevCurrentSubnetMask | 相机当前子网掩码 |
| GevCurrentDefaultGateway | 相机当前默认网关 |
| GevPersistentIPAddress | 相机永久 IP 地址 |
| GevPersistentSubnetMask | 相机永久子网掩码 |
| GevPersistentDefaultGateway | 相机永久默认网关 |
| GevCurrentIPconfigurationDHCP | 当前IP配置DHCP |
| GevCurrentIPConfigurationLLA | 当前IP配置LLA |
| GevCurrentIPConfigurationPersistentIP | 当前IP配置静态IP |
| GevInterfaceSelector | 接口选择器 |
| GevMACAddress | MAC地址 |
| GevGVCPPendingAck | 命令超时是否上报Pending_ACK |
| GevGVCPPendingTimeout | GVCP命令执行超时时间 |
| GevCCP | 控制应用程序访问相机的权限 |
4.1.6 Transport Layer Control---SCPD/GVCP
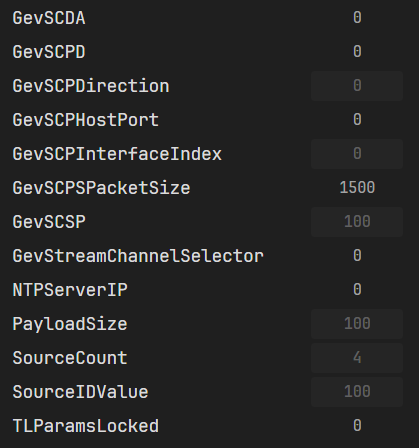
SCPD/GVCP参数
| SCPD/GVCP属性 | 参数及描述 |
|---|---|
| GevSCDA | 流通道的目的地址 |
| GevSCPD | 控制报文之间的间隔。修改此数值可以降低对网卡的要求,但是最大带宽会受一定的影响,单帧的获取时间会加长。 |
| GevSCPDirection | 相机流通道使用的方向 |
| GevSCPHostPort | 相机流通道使用的端口号 |
| GevSCPInterfaceIndex | 显示设备对应的逻辑通道号 |
| GevSCPSPacketSize | 设置流通道的报文长度 |
| GevSCSP | 流通道的目的端口 |
| GevStreamChannelSelector | 流通到选择器 |
| NTPServerIP | NTP服务器IP地址 |
| Payloadsize | 每个报文的长度 |
| SourceCount | 源数量 |
| SourceIDValue | 源数值 |
| TLParamsLocked | 锁定相机参数 |
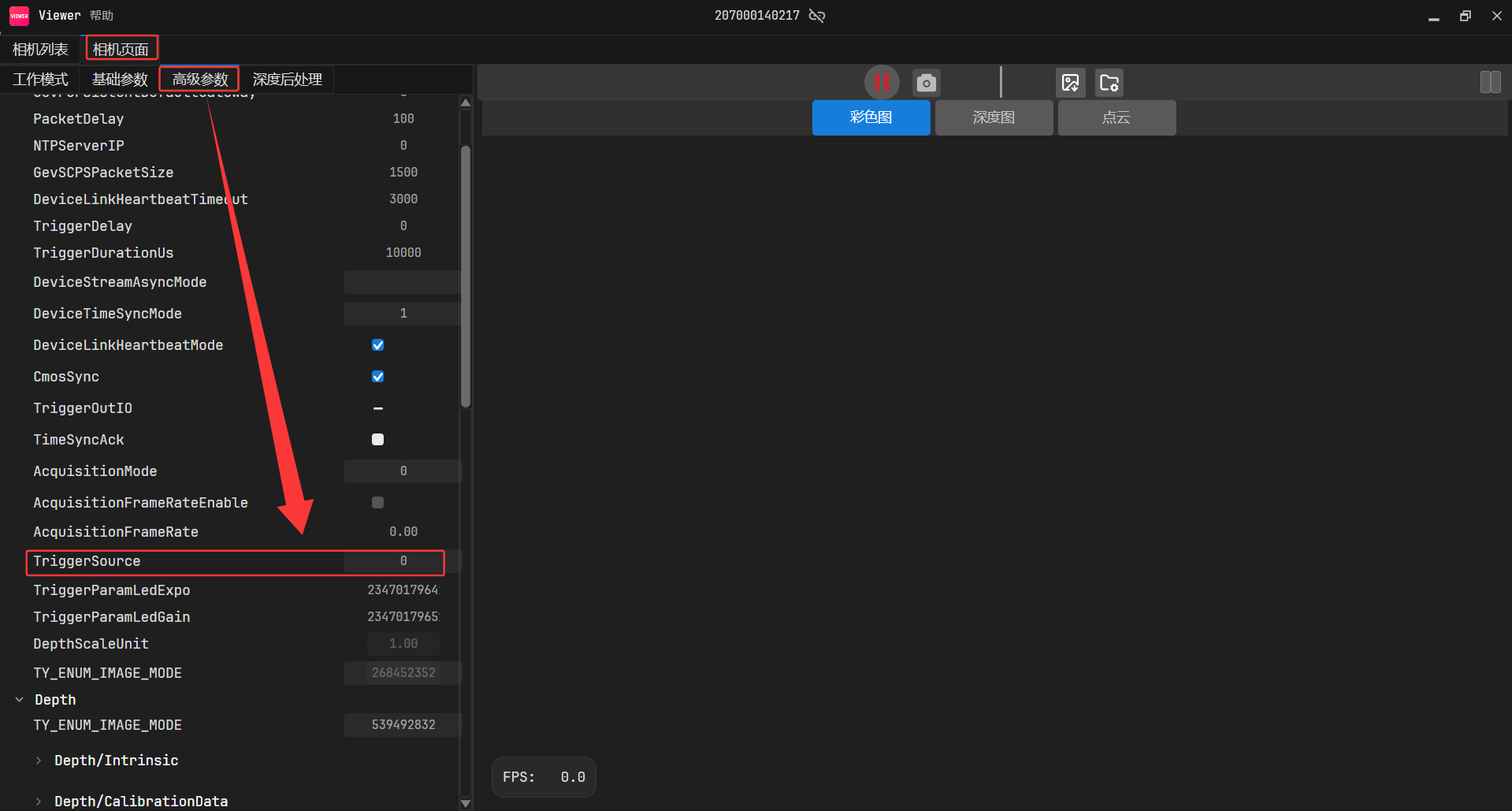
4.1.7 触发模式
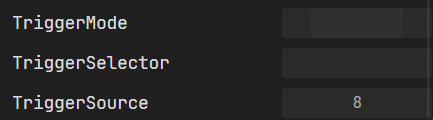
触发模式属性参数说明
| 触发模式属性 | 参数及描述 |
|---|---|
| TriggerSelector | 触发器选择器 |
| TriggerMode | 触发模式 |
| TriggerSource | 触发源 |
4.2 深度图属性
4.2.1 SGBM属性
诸如FM855-E1,FM815-IX-E1,PS800,PS802等带有SGBM参数的相机
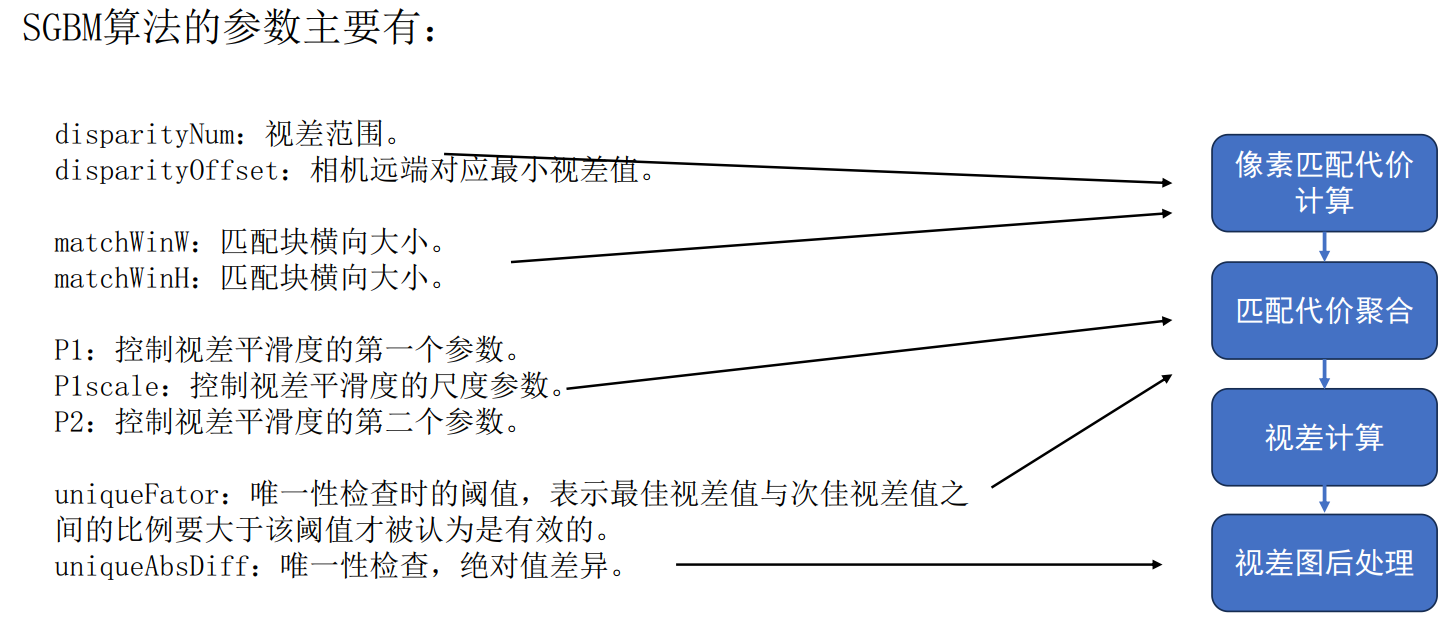
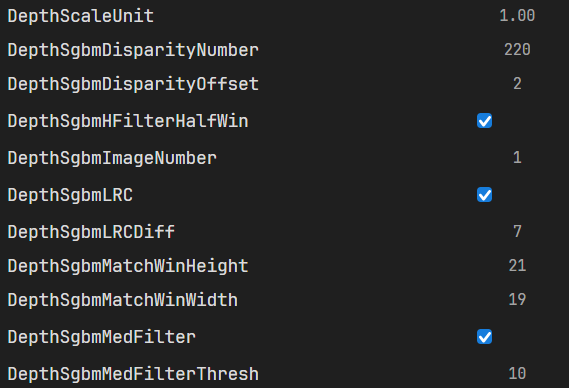


4.2.1.1 精度相关SGBM参数
精度相关的SGBM 参数
| SGBM属性 | 参数及描述 |
|---|---|
| DepthScaleUnit | 设置深度图中像素值的单位 |
1.深度数据可表示
最大值 = 65536 * scale unit。2.设定值越小,深度计算的精度越高,但设定值过小可能会导致深度计算出现误差。
4.2.2.2 测量范围相关SGBM参数
测距范围相关的SGBM 参数
| SGBM属性 | 参数及描述 |
|---|---|
| DepthSgbmDisparityNumber | 设置视差搜索范围 |
| DepthSgbmDisparityOffset | 设置开始搜索的视差值 |
使用场景 :
客户想要更改预定义的深度范围(近远端值)。
调整方向 :深度范围减小, disparityNum大概率减小。
深度范围远端往相机端缩进, disparityOffset变大,反之亦反。
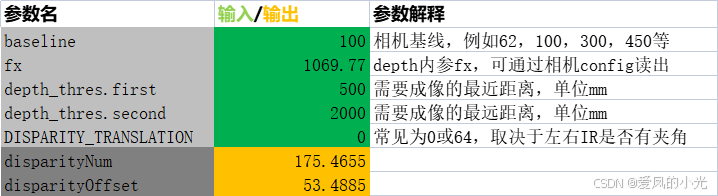
而disparityNum和disparityOffset参数设置,计算公式如下:
cpp
disparityNum = (baseline* fx) / depth_thres.first - (baseline* fx) / depth_thres.second + 15;
disparityOffset = ((baseline * fx) / (depth_thres.second)) - DISPARITY_TRANSLATION;计算公式里的每个参数的具体含义如下:
4.2.2.3 帧率相关SGBM参数
帧率相关的SGBM 参数
| SGBM属性 | 参数及描述 |
|---|---|
| DepthSgbmImageNumber | 设置用于深度计算的 IR 图像数量 |
| DepthSgbmMatchWinHeight | 设置视差匹配窗口的高 |
| DepthSgbmMatchWinWidth | 设置视差匹配窗口的宽 |
使用场景 :
针对被测物要测量的特征(针对的是平滑面,还是物体细节),进行细微的调整。
调整方向 :一般的预设置的匹配块大小可认为是一个全局考虑的值;深度图越需要平滑的,匹配块大概率是从预设值向大调整,反之,亦反。
注意事项1:请首先按照 matchWinW = matchWinH 的方式进行调整;
一般匹配块大小必须是奇数且大于等于3;
注意事项2:受相机算力的影响,image number 和 match window height 之间存在一个约束,即 (image number+1) / 2 * match window height < 48。
4.2.2.4 边缘像素平滑处理相关的的SGBM 参数
边缘像素平滑处理相关的的SGBM参数
| SGBM属性 | 参数及描述 |
|---|---|
| DepthSgbmSemiParamP1 | 控制视差平滑度的第一个参数 |
| DepthSgbmSemiParamP1Scale | 控制视差平滑度的尺度参数 |
| DepthSgbmSemiParamP2 | 控制视差平滑度的第二个参数 |
使用场景 : 需要调整深度图平滑度的情况。
调整方向 P1越大,越倾向于生成连续的视差图。 P1scale作用在平滑度上,P1sacle范围是0\~1,越大就越平滑。 P2越大,越倾向于消除小的视差变化。P2必须大于P1。
注意事项:建议先调整P1sacle,后P1,再P2。
4.2.2.5 与误匹配相关的SGBM参数
与误匹配相关的SGBM 参数
| SGBM属性 | 参数及描述 |
|---|---|
| DepthSgbmUniqueFactor | 唯一性检查阈值, 最优与次优的比值约束 |
| DepthSgbmUniqueAbsDiff | 唯一性检查阈值, 绝对值差阈值 |
| DepthSgbmUniqueMaxCost | 唯一性最大代价阈值 |
| DepthSgbmLRC | 左右一致性检查开关 |
| DepthSgbmLRCDiff | 左右一致性差异阈值 |
使用场景 :被测物有杂点、飞点、空洞过多等情况。
调整方向 :后处理约束参数调整过小会产生杂点或飞点;过大则会产生大片空洞。 一般uniqueAbsDiff 比 uniqueFator约束性更强。
4.2.2 纹理滤波
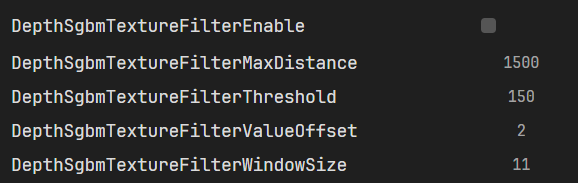
纹理滤波参数
| 纹理滤波属性 | 参数及描述 |
|---|---|
| DepthSgbmTextureFilterEnable | 纹理滤波使能开关 |
| DepthSgbmTextureFilterMaxDistance | 纹理滤波最大有效距离 |
| DepthSgbmTextureFilterThreshold | 纹理滤波梯度阈值 |
| DepthSgbmTextureFilterValue0ffset | 纹理滤波偏移值 |
| DepthSgbmTextureFilterWindowSize | 纹理滤波的滑动窗⼝⼤⼩ |
4.2.3 饱和度滤波
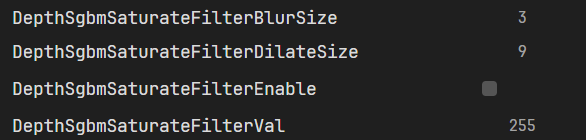
饱和度滤波参数
| 饱和度滤波属性 | 参数及描述 |
|---|---|
| DepthSgbmSaturateFilterBlurSize | 降噪的盒式滤波器⼤⼩ |
| DepthSgbmSaturateFilterDilatesize | 膨胀核⼤⼩ |
| DepthSgbmSaturateFilterEnable | 启⽤/禁⽤饱和度滤波 |
| DepthSgbmSaturateFilterVal | 饱和度阈值 |
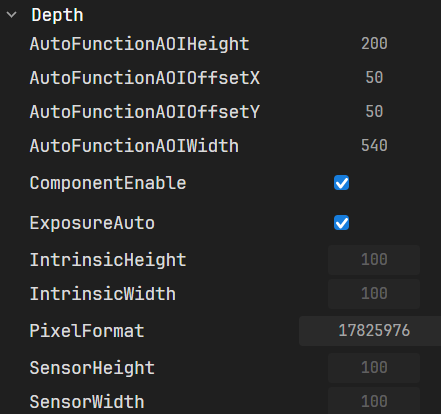
深度图属性参数说明
| 深度图属性 | 参数及描述 |
|---|---|
| ComponentEnable | 是否使能组件 |
| ExposureAuto | 自动曝光时间 |
| ExposureTargetBrightness | 自动曝光目标亮度 |
| AutoFunctionAOIOffsetX | 自动功能AOI水平偏移 |
| AutoFunctionAOIOffsetY | 自动功能AOI垂直偏移 |
| AutoFunctionAOIWidth | 自动功能AOl宽度 |
| AutoFunctionAOIHeight | 自动功能AOI高度 |
| IntrinsicHeight | 内部高度 |
| IntrinsicWidth | 内部宽度 |
| PixelFormat | 图像格式 |
| SensorHeight | Sensor的高 |
| SensorWidth | Sensor的宽 |
4.3 Texture(彩色)属性
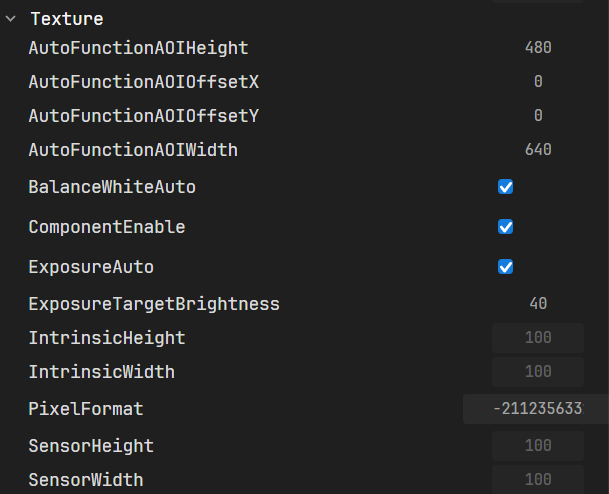
RGB属性参数说明
| RGB属性 | 参数及描述 |
|---|---|
| ComponentEnable | 是否使能组件 |
| ExposureAuto | 自动曝光时间 |
| ExposureTargetBrightness | 自动曝光目标亮度 |
| AutoFunctionAOIOffsetX | 自动功能AOI水平偏移 |
| AutoFunctionAOIOffsetY | 自动功能AOI垂直偏移 |
| AutoFunctionAOIWidth | 自动功能AOl宽度 |
| AutoFunctionAOIHeight | 自动功能AOI高度 |
| IntrinsicHeight | 内部高度 |
| IntrinsicWidth | 内部宽度 |
| PixelFormat | 图像格式 |
| SensorHeight | Sensor的高 |
| SensorWidth | Sensor的宽 |
4.4 左IR属性
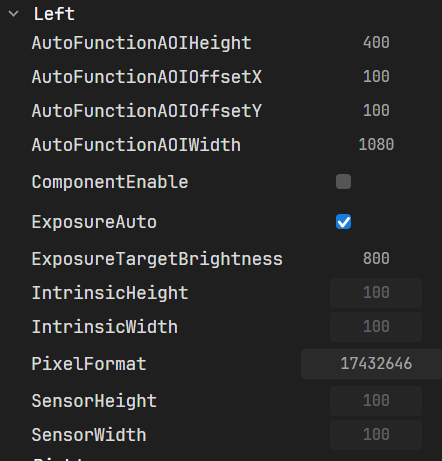
左IR属性参数说明
| 左IR属性 | 参数及描述 |
|---|---|
| ComponentEnable | 是否使能组件 |
| ExposureAuto | 自动曝光时间 |
| ExposureTargetBrightness | 自动曝光目标亮度 |
| AutoFunctionAOIOffsetX | 自动功能AOI水平偏移 |
| AutoFunctionAOIOffsetY | 自动功能AOI垂直偏移 |
| AutoFunctionAOIWidth | 自动功能AOl宽度 |
| AutoFunctionAOIHeight | 自动功能AOI高度 |
| IntrinsicHeight | 内部高度 |
| IntrinsicWidth | 内部宽度 |
| PixelFormat | 图像格式 |
| SensorHeight | Sensor的高 |
| SensorWidth | Sensor的宽 |
4.5 右IR属性
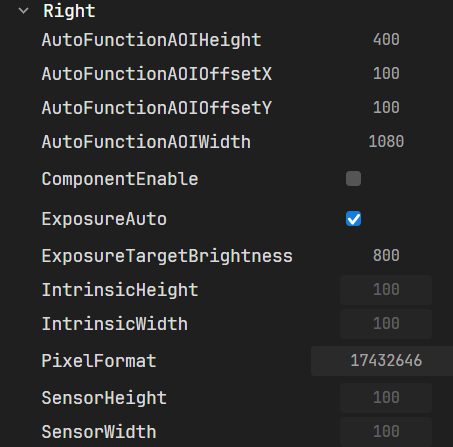
右IR属性参数说明
| 右IR属性 | 参数及描述 |
|---|---|
| ComponentEnable | 是否使能组件 |
| ExposureAuto | 自动曝光时间 |
| ExposureTargetBrightness | 自动曝光目标亮度 |
| AutoFunctionAOIOffsetX | 自动功能AOI水平偏移 |
| AutoFunctionAOIOffsetY | 自动功能AOI垂直偏移 |
| AutoFunctionAOIWidth | 自动功能AOl宽度 |
| AutoFunctionAOIHeight | 自动功能AOI高度 |
| IntrinsicHeight | 内部高度 |
| IntrinsicWidth | 内部宽度 |
| PixelFormat | 图像格式 |
| SensorHeight | Sensor的高 |
| SensorWidth | Sensor的宽 |
4.6 激光器属性

激光器属性参数说明
| 激光器属性 | 参数及描述 | 备注 |
|---|---|---|
| LaserPowerAutoCtrl | 激光器使能 | 启用/不启用 |
| LightBrightness | 激光器亮度 | 范围0~100 |
4.7 相机温度
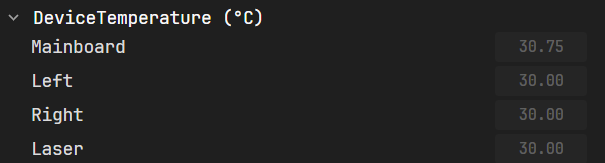
相机温度属性参数说明
| 相机温度属性 | 参数及描述 |
|---|---|
| LMainboard | 主面板 |
| Left | 左IR |
| Right | 右IR |
| Laser | 散斑投射器 |
5.流程操作
5.1 相机调参技巧
待补充
5.2 查看与调整视图
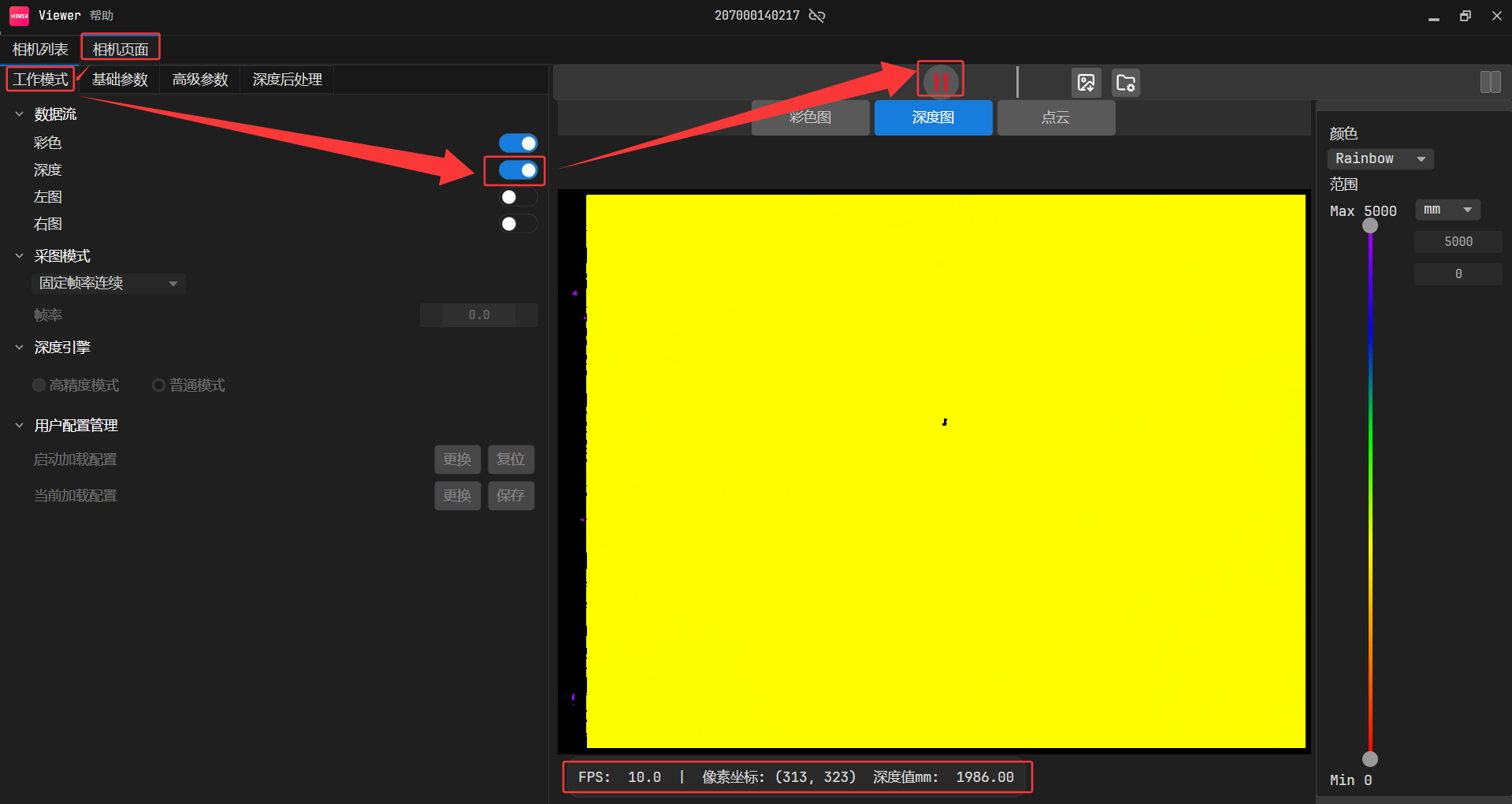
5.2.1 查看深度值
打开深度取图开关,点击 按钮开始采图
按钮开始采图
2.将鼠标放置于深度图上,即可查看当前像素点对应的像素坐标与实际深度值(单位:mm)。
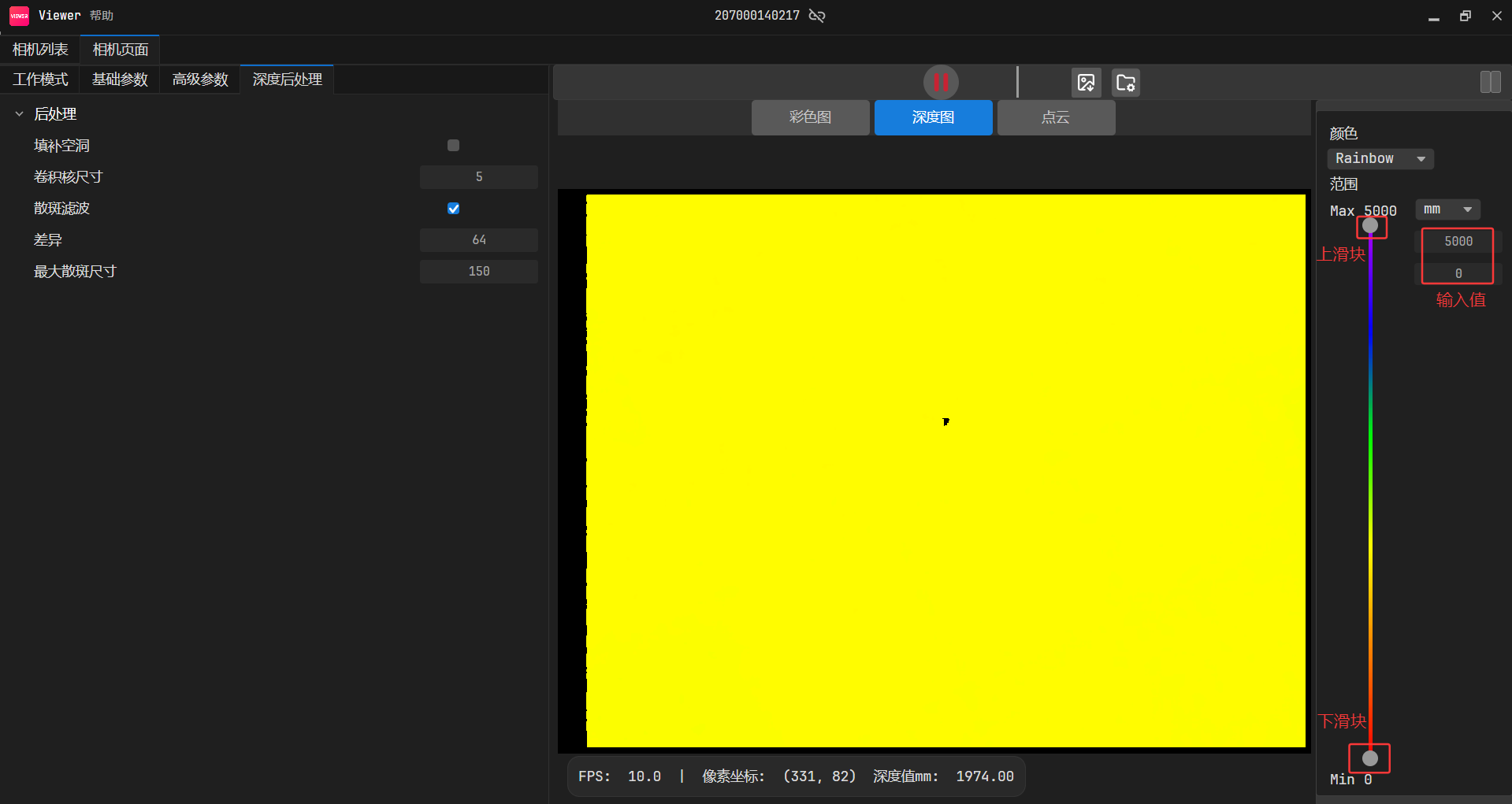
5.2.2 渲染范围调节方法
深度图支持动态渲染范围调整。通过优化目标深度区间的色彩映射 ,显著增强深度细节的可辨识度。
1.通过上滑块 调节渲染深度上限,通过下滑块调节渲染深度下限。
2.直接在输入框 键入目标值,或通过箭头微调。
5.2.3 调节深度图渲染效果
1.深度值位于下滑块值和上滑块值之间时,色彩梯度均匀分布 ;
2.深度值小于下滑块值显示为红色,深度值大于上滑块值显示为紫色。
当场景深度集中分布在 400-800 mm 区间时:
使用默认渲染范围(0-5000 mm):如下方左图所示,色彩梯度平缓,细节难以区分****。
缩小范围至400--800mm:如下方右图所示,色彩对比鲜明,可清晰辨识三个物体的深度差异。
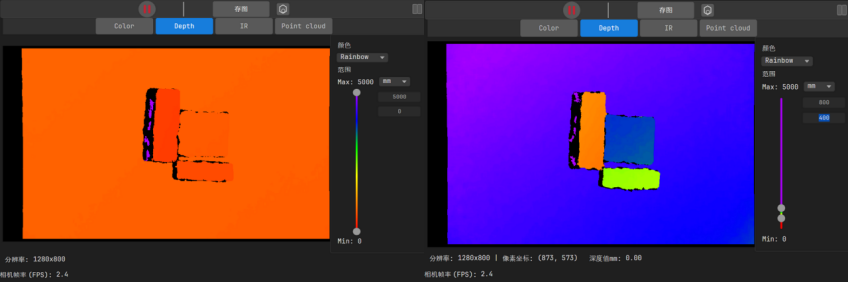
使用默认深度渲染范围(左)/调节渲染范围后(右)
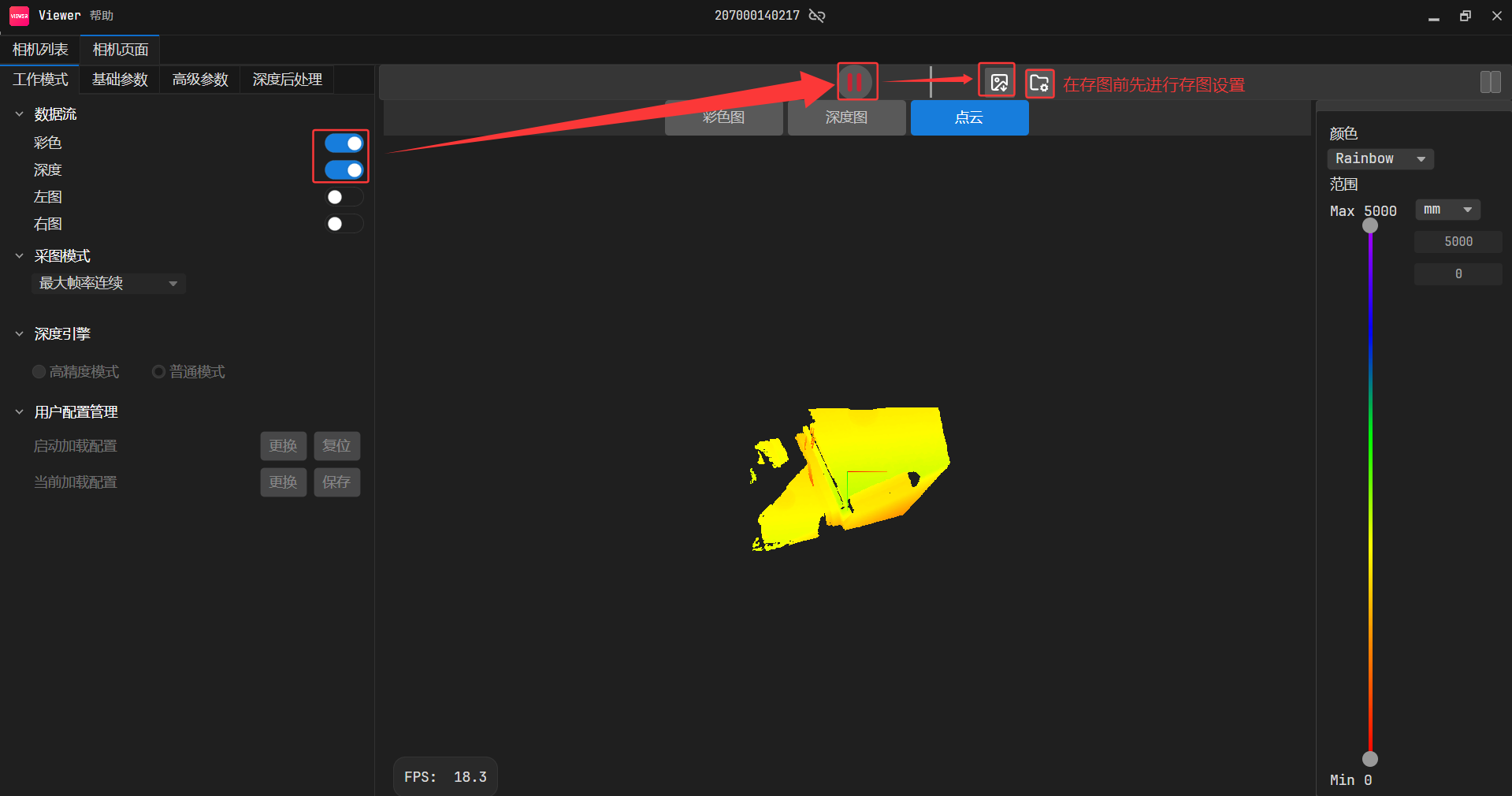
5.2.4 调整点云视图
1.打开深度 取图开关,点击 开始采图。
开始采图。
2.切换到点云视图。
缩放点云 :将鼠标置于点云视图,滚动鼠标滚轮。
旋转点云 :按住鼠标左键并拖动。
平移点云:按住鼠标右键并拖动。
5.3 保存图像
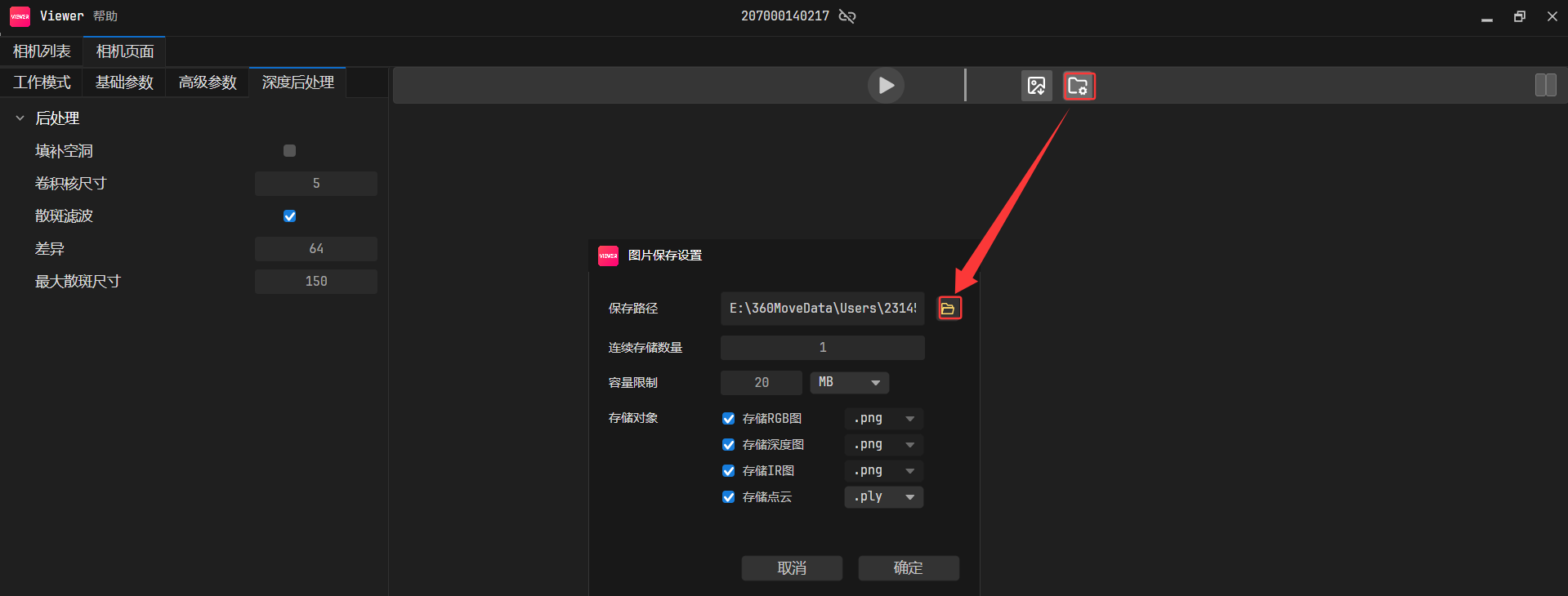
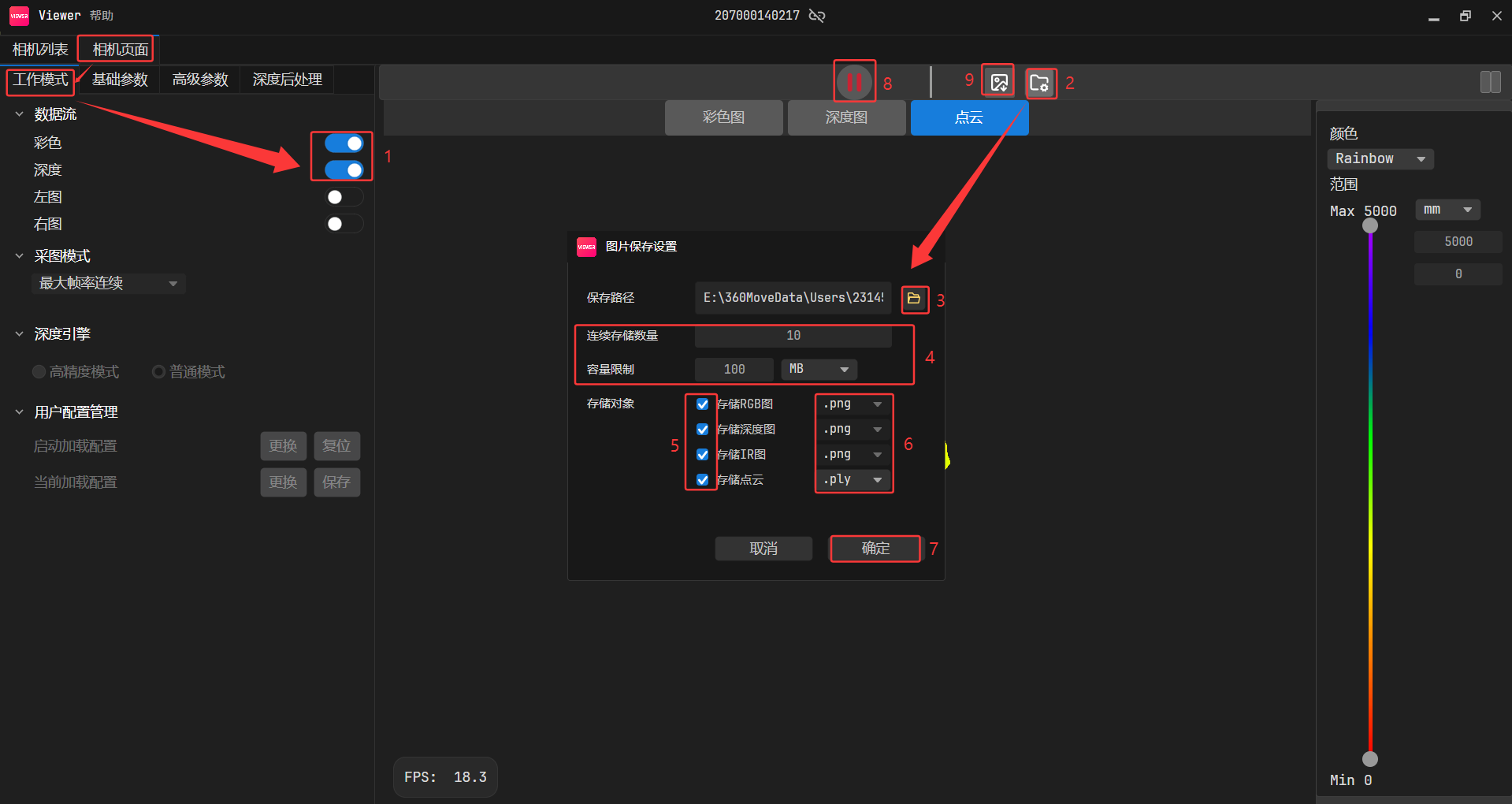
5.3.1 存图设置
新的Percipio Viewer支持保存当前帧图像,可同时保存彩色图、深度图、渲染后的深度图、左/右IR图、点云数据
(.ply/.pcd格式)。
操作步骤:
1.点击 ,弹出保存图片设置对话框。
,弹出保存图片设置对话框。
2.点击 ,选择存图文件夹,并点击 "确定 "。
,选择存图文件夹,并点击 "确定 "。
5.3.2 保存图片
保存图像操作如下:
系统将弹出保存图像提示框。核对提示框中显示的已保存图像数量是否与开启的数据流数量一致,若一致则表示存图成功。
5.3.3 单张存图
5.3.4 连续存图
6.常见问题FAQ
6.1 新版本软件双击无反应
6.2 状态码显示为"-1016"
在设备列表中,点击相机序列号后,状态码显示为 "-1016 "
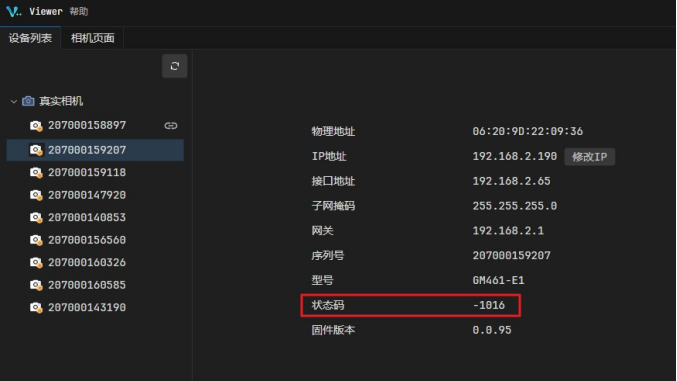
原因:
网络相机被占用。
解决措施:
请排查是否有本机上的其他进程或其他上位机占用了该相机。若相机被占用,解除占用即可。
6.3 修改 IP 后提示"IP设置失败:Timeout"?
问题:
修改 IP 地址后,弹出提示对话框,显示:"IP设置失败,Timeout"。
原因1:
网络相机被占用。
解决措施1:
请排查是否有本机上的其他进程或其他上位机占用了该相机。若相机被占用,解除占用即可。
原因2:
目标IP网段与上位机IP网段不符。
解决措施2:
设置相机为静态 IP 前,需确保上位机 IP 地址在目标网段上。
6.4.连接相机后,相机参数界面部分组件不显示?
问题:
连接相机后,相机参数界面部分组件不显示。
如下图,相机参数界面只显示深度和用户配置控制组件,未显示彩色和IR组件。
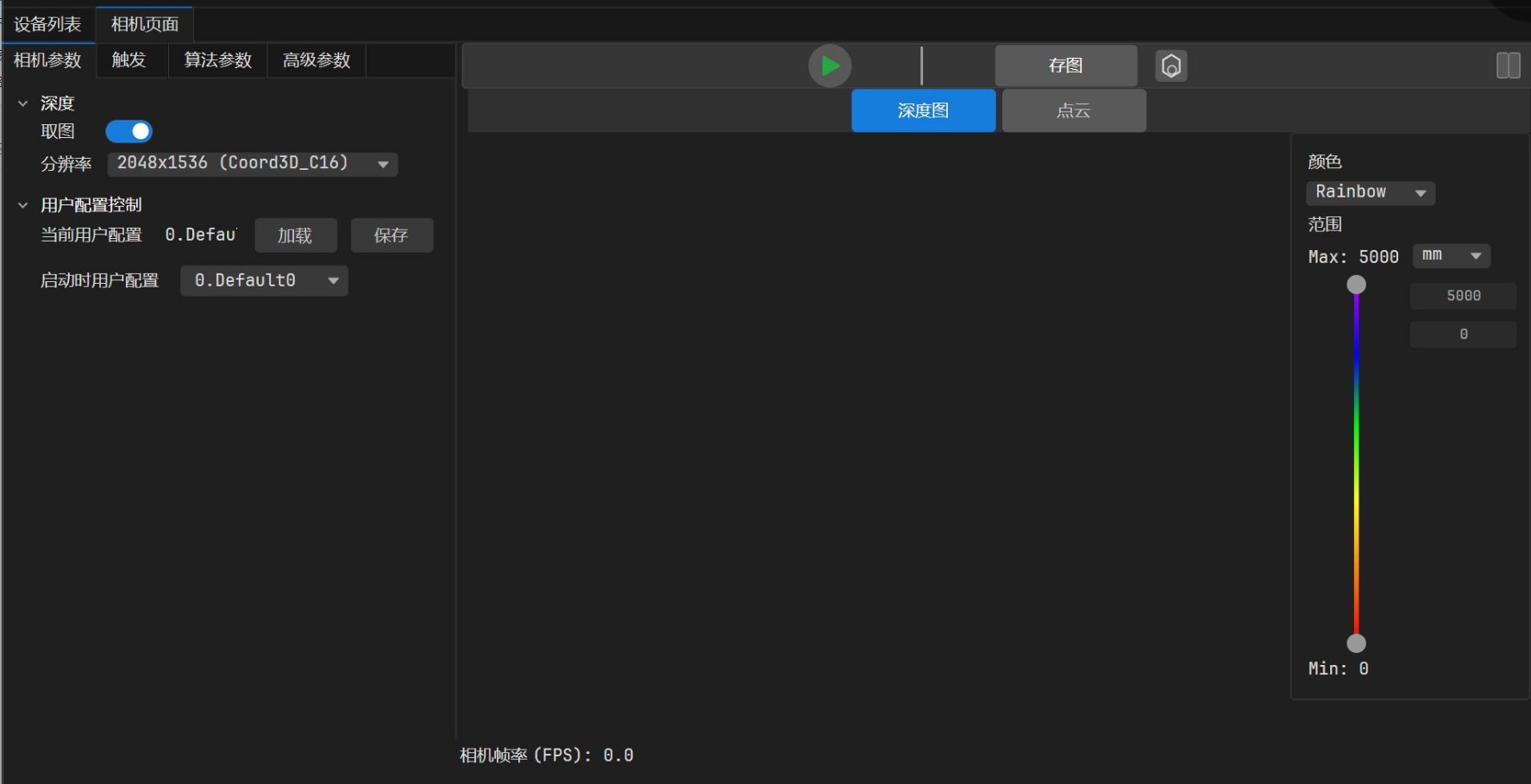
原因:
上位机系统处于低性能模式
解决措施:
先按照以下步骤,将上位机系统切换到高性能模式。
1.按Win+R ,输入cmd ,然后按下Ctrl+Shift+Enter以管理员身份运行。
2.输入以下命令切换到高性能电源计划:
cpp
powercfg -setactive 8c5e7fda-e8bf-4a96-9a85-a6e23a8c635c3.输入以下命令,验证是否切换成功:
cpp
powercfg /getactivescheme若显示为**"高性能**"模式,表示切换成功。
然后按照以下步骤,设置处理器电源状态。
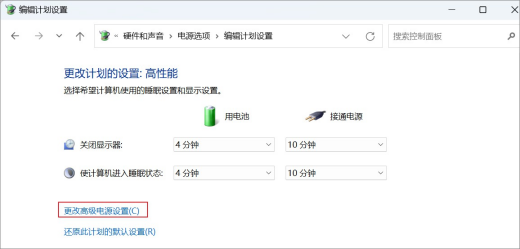
1.打开控制面板,选择 "硬件和声音 " > "电源选项 " > "编辑电源计划 " > "更改高级电源设置 " ,打开 电源选项 界面。
IP设置成功
2.展开 "处理器电源管理 " > "最小处理状态 ",将 "使用电池 " 和 "接通电源 " 均修改为100%。
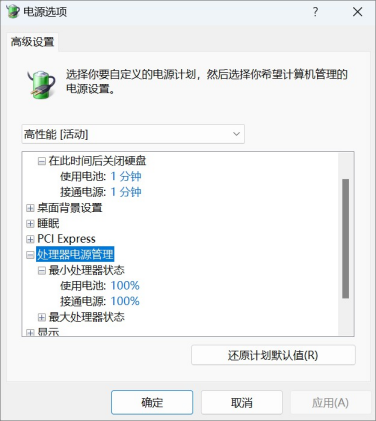
设置处理器电源状态