系列文章<八>(从LED显示屏的Gamma过曝问题问题到手机影像):从LED冬奥会、奥运会及春晚等大屏,到手机小屏,快来挖一挖里面都有什么
- 攻克LED显示中的Gamma过曝问题:从传统驱动优化到AI超分的进阶之路
-
- [🔧 一、问题定义:LED显示中的Gamma过曝:传统工程解法与底层视觉思路](#🔧 一、问题定义:LED显示中的Gamma过曝:传统工程解法与底层视觉思路)
- 二、融入底层视觉的进阶解决方案
-
- [2.1 自适应Gamma校正](#2.1 自适应Gamma校正)
- [2.2 深度学习驱动的自适应Gamma校正](#2.2 深度学习驱动的自适应Gamma校正)
巨人的肩膀:
- https://github.com/tensorlayer/SRGAN
- chrome-extension://bpoadfkcbjbfhfodiogcnhhhpibjhbnh/pdf/index.html?file=https%3A%2F%2Fopenaccess.thecvf.com%2Fcontent_cvpr_2017%2Fpapers%2FLedig_Photo-Realistic_Single_Image_CVPR_2017_paper.pdf
- 佛佛里打的小可爱~~~~!~~~~
系列文章规划:以解决的LED"Gamma过曝"等相关问题为切入点,系统拆解其与手机影像ISP(图像信号处理器)中3A算法、AI超分、HDR 等模块的共性技术原理。深入剖析LED显示问题(如闪烁、色块)与手机拍照问题(如色彩断层、低光照噪点)在底层信号处理层面的关联。中间会夹杂讲解类似如下内容:
- 详解全灰阶校正 、Gamma标定等关键技术如何在LED显示与手机影像两大领域共通应用。
- 探讨AI技术(如AI超分、AI HDR)如何借鉴传统ISP流程解决画质问题。
- 即:LED显示屏的核心痛点与对应的AI解决方案。
往期文章如下:
系列文章<一>(从LED显示问题到非LED领域影像画质优化:揭秘跨领域的核心技术):从LED冬奥会、奥运会及春晚等大屏,到手机小屏,快来挖一挖里面都有什么
系列文章<二>(从LED低灰不起灰、跳灰、过曝问题到手机影像:Gamma映射的跨领域技术解析):从LED冬奥会、奥运会及春晚等大屏,到手机小屏,快来挖一挖里面都有什么
...待补充
攻克LED显示中的Gamma过曝问题:从传统驱动优化到AI超分的进阶之路
🔧 一、问题定义:LED显示中的Gamma过曝:传统工程解法与底层视觉思路
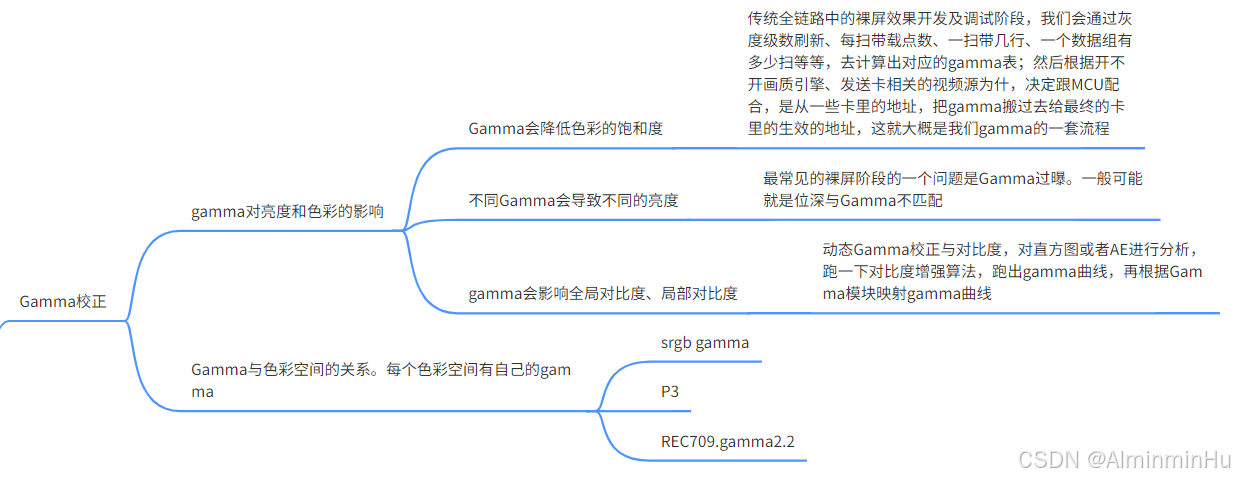
在LED显示屏行业,经常会遇到Gamma过曝相关的问题。Gamma过曝通常表现为低灰细节丢失、画面整体发白、亮区缺乏层次。这本质上是电光转换特性(E-O特性)的非线性与系统Gamma校正曲线不匹配导致的。。
-
通俗点说:
- gamma是一种亮度相关数学变换方式,幂函数:Vout=Vin^λ,Vout是图像输出的亮度,Vin是图像输入的亮度。假设gamma是2.2的gamma,那么λ=1/2.2
- gamma校正:输入亮度和输出亮度的非线性变换关系
-
Gamma校正的原理及其在显示和图像处理中的重要性
- 韦伯定律(人眼对暗部更敏感)和带宽优化(为暗部分配更多编码)出发,解释Encoding Gamma和Display Gamma的协同工作流程。并结合一个诺瓦星云项目中的真实案例,说明Gamma设置错误如何导致过曝及你的解决过程。
- 通俗点说:韦伯理论(JND):人眼的视觉是非线性的,并且人眼对暗部的变化是更加敏感的。因为人眼对暗区变化更加敏感,所以在存储的时候应该给暗区更大的带宽,比如0-255 位深为8bit,那么需要把更多的bit分配给暗区。通过gamma校正,可以将存储的位宽更多的分配给暗区,然后再显示端再做反gamma校正,将图像重新变为线性的(或者非线性的)
- 韦伯定律(人眼对暗部更敏感)和带宽优化(为暗部分配更多编码)出发,解释Encoding Gamma和Display Gamma的协同工作流程。并结合一个诺瓦星云项目中的真实案例,说明Gamma设置错误如何导致过曝及你的解决过程。
-
Gamma校正的数学本质
Gamma校正的核心数学公式
def gamma_correction(input_value, gamma):
"""
Gamma校正数学原理
V_out = V_in ^ (1/γ) # 编码Gamma
V_out = V_in ^ γ # 显示Gamma
"""
return np.power(input_value, 1.0/gamma)实际工程中的位深处理
def apply_gamma_with_bit_depth(input_8bit, gamma, target_bit_depth):
"""考虑位深的Gamma校正实现"""
# 归一化到[0,1]
normalized = input_8bit / 255.0
# Gamma校正
gamma_corrected = np.power(normalized, 1.0/gamma)
# 量化到目标位深
quantized = np.round(gamma_corrected * (2**target_bit_depth - 1))
return quantized.astype(np.uint16)Gamma知识体系
├── 数学基础
│ ├── 幂函数变换: V_out = V_in^γ
│ ├── 编码Gamma (γ < 1): 暗部扩展,亮部压缩
│ └── 显示Gamma (γ > 1): 暗部压缩,亮部扩展
│
├── 生理学基础
│ ├── 韦伯定律: ΔI/I = K (人眼对暗部更敏感)
│ └── JND(恰可察觉差): 指导位深分配
│
├── 工程实现
│ ├── 查找表(LUT)实现
│ ├── 位深匹配: 8bit/10bit/12bit Gamma表
│ └── 硬件流水线: 发送卡→接收卡→驱动IC
│
├── 问题诊断
│ ├── Gamma过曝: 高灰阶截断
│ ├── Gamma欠曝: 低灰阶合并
│ └── 色彩偏移: RGB通道不平衡
│
└── 全链路集成
├── 地址映射:
├── 与画质引擎协同
└── 测评软件验证
其中,流程性的:可参考https://en.wikipedia.org/wiki/Gamma_correction
- ISP中流程:Scene-->Sensor--->Encoding gamma(gamma校正)--->存储--->Display gamma--->Display
- Encoding Gamma:底>1的对数函数。按照曲线趋势,可以看出提亮了图像暗区的亮度,也就是低灰区域的亮度。相对的,也就是压缩了亮区的亮度
- Displya Gamma:底>1的指数函数,按照曲线趋势,可以看出压缩了了图像暗区的亮度,也就是低灰区域的亮度。相对的,也就是提高了亮区的亮度
这些问题的核心痛点在于:源于位深与Gamma曲线不匹配。在传统链路系统中,经常通过调节DCLK频率、GCLK相位、电流档位等硬件参数,配合Gamma表重新计算和加载来解决。。
- Gamma过曝的根本原因分析
- 在传统全链路中的具体表现:
- 位深不匹配:10bit Gamma表用在8bit系统,高灰阶被截断
- IC参数冲突:VCOM电压过高 + Gamma曲线过陡 = 低灰细节丢失
- 信号链误差:从发送卡到驱动芯片的Gamma表搬运地址错误
- 在传统全链路中的具体表现:
传统链路中的常规调试流程:传统调试的"望闻问切"
- 定位问题根源
- 核对位深与Gamma曲线匹配:这是最常见的原因。例如,驱动芯片配置为10bit灰度处理,但上屏的Gamma校正表却是按8bit生成的,会导致高灰阶信号被压缩至上限,引起过曝。
- 检查信号通路:确认从发送卡(如SP系列)到接收卡,再到驱动芯片的整个通路中,Gamma校正的加载地址和数值传递是否正确,避免数据错位或覆盖。
- 分析IC参数:重点检查驱动芯片的VCOM电压、Source输出增益等模拟参数。这些参数设置不当会直接改变电光转换特性,使实际EO曲线偏离预设的Gamma校正曲线。
- 四步定位法:
- 信号链检查:确认从发送卡地址到驱动芯片的Gamma表搬运是否正确
- 位深验证:核对Gamma表位深与硬件处理位深是否匹配(如10bit表用在8bit系统)
- IC参数分析:检查VCOM电压、源极增益是否导致EO曲线偏离预期
- Gamma表重算:基于实际测量重新生成匹配的查找表
- 四步定位法:
- 核心调试步骤
-
重新计算Gamma表:基于目标Gamma值(如2.2),根据实际的位深(如12bit、14bit)重新计算查找表(LUT)。确保输入-输出映射关系在低灰阶分配足够的编码值,在高灰阶避免被截断。
-
硬件参数协同调整:
- 电流档位:适当降低全局电流(如从128降至96),压缩整体亮度动态范围,为Gamma校正留出空间。
- 扫描配置:优化扫描次数和每扫带载行数,改善低灰均匀性,间接缓解因均匀性差导致的局部过曝。
-
验证与迭代:使用光枪测量0-255灰阶的亮度输出,绘制实际EO曲线。与目标Gamma曲线对比,微调Gamma表直至匹配
Gamma过曝诊断流程
def diagnose_gamma_overexposure(screen_phenomenon):
"""
基于现象的诊断流程
"""
diagnostic_flow = {
'整体发白': '检查全局Gamma曲线斜率',
'低灰细节丢失': '验证0-30灰阶的亮度输出',
'高亮区域糊成一片': '检查高灰阶(200-255)的量化精度',
'色彩饱和度降低': '分析RGB三通道Gamma一致性'
}
return diagnostic_flow.get(screen_phenomenon, '全面信号链检查')
-
二、融入底层视觉的进阶解决方案
传统的Gamma校正使用固定的全局曲线,但导致过曝的一个深层原因是场景内容动态范围与显示设备静态Gamma不匹配。
- 传统的Gamma校正有哪些局限性?如何用现代AI技术改进?
- 传统方法的静态和全局性不足,无法应对场景内容变化和局部过曝/欠曝。
- 基于深度学习的自适应Gamma校正方案。
- 构建符合显示退化特性的数据集(模拟低灰、量化噪声)和模型轻量化部署方面的具体思路,这表明你具备从研究到落地的完整能力。
2.1 自适应Gamma校正
核心思想是根据输入图像内容,动态生成或选择Gamma曲线。
-
基于图像统计特征:计算图像的直方图,若高亮像素聚集,则自动采用更高Gamma值(如2.4)的曲线,压缩高光细节;若图像整体偏暗,则采用较低Gamma值(如2.0)的曲线,提亮暗部。
-
在全链路中的落地:你可以在画质引擎模块中,在现有的Gamma流水线前,增加一个场景分析模块。该模块实时分析输入视频的统计信息,从预置的多个Gamma曲线中选择最合适的一条,或微调曲线参数。
import torch
import torch.nn as nn
import torch.nn.functional as Fclass AdaptiveGammaNetwork(nn.Module):
"""基于深度学习的自适应Gamma校正网络"""def __init__(self, num_gamma_curves=5): super().__init__() # 特征提取 - 分析图像统计特性 self.feature_extractor = nn.Sequential( nn.Conv2d(3, 32, 3, stride=2, padding=1), # 下采样提取全局特征 nn.ReLU(), nn.AdaptiveAvgPool2d(8), # 固定到8x8大小 nn.Flatten(), nn.Linear(32*8*8, 128), nn.ReLU() ) # Gamma曲线预测 self.gamma_predictor = nn.Sequential( nn.Linear(128, 64), nn.ReLU(), nn.Linear(64, num_gamma_curves), # 预测最适合的Gamma曲线索引 nn.Softmax(dim=1) ) # 或者直接回归Gamma参数 self.gamma_regressor = nn.Sequential( nn.Linear(128, 32), nn.ReLU(), nn.Linear(32, 1), nn.Sigmoid() # 输出范围[0,1],映射到[1.8, 2.6] ) def forward(self, x): features = self.feature_extractor(x) # 方法1: 分类 - 选择预定义Gamma曲线 curve_probs = self.gamma_predictor(features) # 方法2: 回归 - 直接预测Gamma值 gamma_value = 1.8 + self.gamma_regressor(features) * 0.8 # [1.8, 2.6] return curve_probs, gamma_valueclass GammaAwareLoss(nn.Module):
"""针对Gamma优化的损失函数"""def __init__(self, low_gray_weight=2.0, high_gray_weight=1.5): super().__init__() self.low_gray_weight = low_gray_weight self.high_gray_weight = high_gray_weight self.mse_loss = nn.MSELoss() def forward(self, pred, target): # 基础MSE损失 base_loss = self.mse_loss(pred, target) # 低灰区域加权损失(基于你的低灰校正经验) low_gray_mask = target < 0.3 if low_gray_mask.sum() > 0: low_gray_loss = self.mse_loss(pred[low_gray_mask], target[low_gray_mask]) else: low_gray_loss = 0 # 高灰区域加权损失(防止过曝) high_gray_mask = target > 0.7 if high_gray_mask.sum() > 0: high_gray_loss = self.mse_loss(pred[high_gray_mask], target[high_gray_mask]) else: high_gray_loss = 0 total_loss = (base_loss + self.low_gray_weight * low_gray_loss + self.high_gray_weight * high_gray_loss) return total_loss
2.2 深度学习驱动的自适应Gamma校正
这是将底层视觉与深度学习结合,从根本上解决问题的方案。目标是训练一个模型,学习从"过曝图像"到"正常图像"的映射。
- 网络模型选择:
- 基础选择:一个轻量的CNN(如3-5层的卷积网络)就足以学习图像到Gamma值的映射。输入可以是图像的下采样版本,输出是目标Gamma值或整个Gamma曲线参数。
- 进阶选择:U-Net或条件GAN。它们能进行像素级调整,输出的是直接校正后的图像,不仅能调Gamma,还能同步进行局部对比度增强和细节恢复,效果更佳。
- 关键:构建数据集
这是模型有效的基石。你需要制作大量过曝-正常图像对。
python
# 数据合成伪代码示例
for normal_image in high_quality_dataset:
# 1. 模拟过曝:施加一个随机的高Gamma值,并引入通道不平衡
over_gamma = 1.8 + random.uniform(0, 0.6) # 模拟过曝曲线
over_exposed = normal_image ** (1 / over_gamma)
# 2. 模拟硬件限制:如你工作中遇到的位深量化误差
bit_depth = random.choice([6, 7, 8]) # 模拟低灰阶问题
quantized = (over_exposed * (2**bit_depth - 1)).astype(np.uint8)
quantized = quantized.astype(np.float32) / (2**bit_depth - 1)
# 此时,(quantized, normal_image) 构成一个训练对数据合成与训练策略
def create_gamma_overexposure_dataset(original_images):
"""
创建Gamma过曝训练数据集
基于你的实际工程经验模拟各种过曝场景
"""
degraded_pairs = []
for img in original_images:
# 1. 随机过曝Gamma (1.6-1.9范围)
over_gamma = 1.6 + np.random.random() * 0.3
over_exposed = np.power(img, 1.0/over_gamma)
# 2. 模拟位深不匹配(基于你的位深经验)
effective_bits = np.random.choice([6, 7, 8])
quantized = (over_exposed * (2**effective_bits - 1)).astype(np.uint8)
quantized = quantized.astype(np.float32) / (2**effective_bits - 1)
# 3. 模拟IC参数导致的通道不平衡(基于你的驱动芯片经验)
channel_shift = np.random.uniform(0.9, 1.1, 3)
channel_shifted = quantized * channel_shift[np.newaxis, np.newaxis, :]
# 4. 添加传输噪声
noise = np.random.normal(0, 0.02, channel_shifted.shape)
final_degraded = np.clip(channel_shifted + noise, 0, 1)
degraded_pairs.append((final_degraded, img))
return degraded_pairs
def train_adaptive_gamma_model():
"""训练自适应Gamma模型"""
# 加载你的实际显示数据或公共数据集
train_dataset = create_gamma_overexposure_dataset(load_training_images())
model = AdaptiveGammaNetwork()
criterion = GammaAwareLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
for epoch in range(100):
for degraded_img, target_img in train_dataset:
# 预测最佳Gamma参数
curve_probs, gamma_value = model(degraded_img)
# 应用预测的Gamma校正
corrected_img = torch.pow(degraded_img, gamma_value)
# 计算损失
loss = criterion(corrected_img, target_img)
optimizer.zero_grad()
loss.backward()
optimizer.step()- 损失函数设计:结合L1/L2损失(保证像素准确)和感知损失/SSIM损失(保证结构相似性和视觉质量)。针对你的低灰经验,还可以在损失函数中为低灰区域(亮度值<30)赋予更高的权重。
- 在全链路中的产品化集成:
- 训练阶段:在强大的服务器上完成模型训练。
- 部署阶段:将训练好的模型通过ONNX Runtime或TensorRT转换为可在产线工控机或集成在FPGA中的轻量化模型。
- 工作流程:测评软件或画质引擎在检测到Gamma过曝倾向时,可调用此模型对图像进行实时预处理,或直接生成校正参数下发给硬件。
- 这种方法虽然在一定程度上改善了运动表现,但存在计算复杂度高、补偿精度有限的问题,特别是在复杂运动场景下容易产生新的伪影。
作者简介:现任西安诺瓦星云科技股份有限公司软件工程师,深度参与LED显示画质引擎开发与全链路效果调试,专注AI与传统图像处理的融合创新。
欢迎交流:如果您在显示画质、手机影像领域有类似的技术挑战或合作想法,欢迎通过CSDN私信交流。
-
如果想了解一些成像系统、图像、人眼、颜色等等的小知识,快去看看视频吧 :
- 抖音:数字图像哪些好玩的事,咱就不照课本念,轻轻松松谝闲传
- 快手:数字图像哪些好玩的事,咱就不照课本念,轻轻松松谝闲传
- B站:数字图像哪些好玩的事,咱就不照课本念,轻轻松松谝闲传
- 认准一个头像,保你不迷路:

- 认准一个头像,保你不迷路:
-
您要是也想站在文章开头的巨人的肩膀啦,可以动动您发财的小指头,然后把您的想要展现的名称和公开信息发我,这些信息会跟随每篇文章,屹立在文章的顶部哦
