从傅里叶时钟到混合尺度:解构 RoPE 位置编码的演进之路
摘要
自 Transformer 架构诞生以来,位置编码一直是其核心组件之一。旋转位置编码 (RoPE) 利用傅里叶变换的"时移-相旋"特性,通过"旋转"而非"相加"的方式,将相对位置信息优雅地集成到注意力机制中,成为当今大语言模型 (LLM) 的基石。
然而,RoPE 的一个核心限制是其**"长度外推性" (Length Extrapolation) 失败**。当模型需要处理比训练时更长的序列时,其性能会急剧下降。本文将深入探讨这一问题的根源,并详细梳理从标准位置插值 (PI) 到 NTK 感知缩放 ,再到 YaRN 的完整技术演进。
我们将引入一个核心比喻------ "多频傅里叶时钟" ------来揭示为何一个看似简单的"外推"问题,需要一个"高频外推、低频内插"的精妙混合策略来解决。
1. RoPE 的核心隐喻:"多频傅里叶时钟"
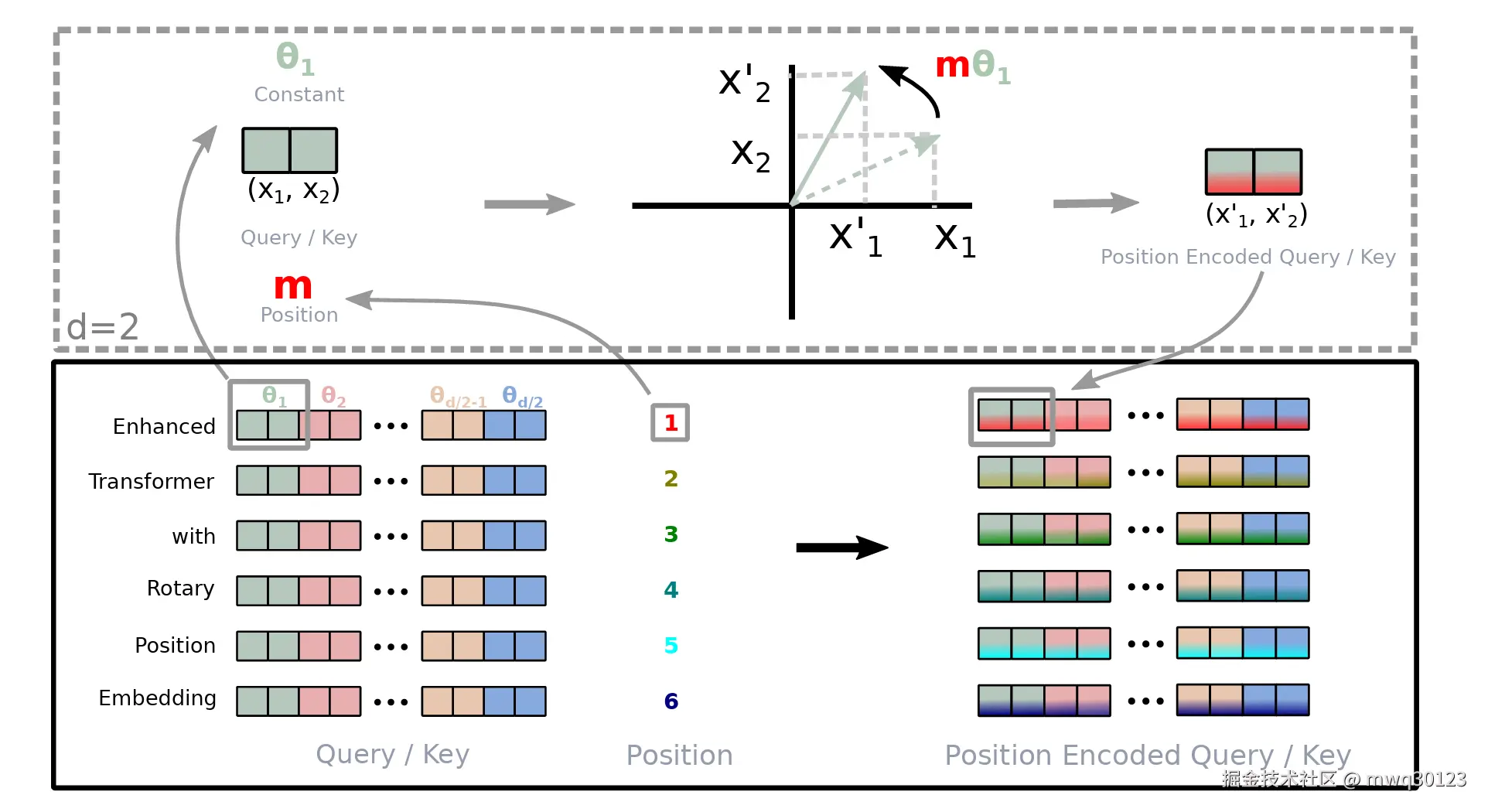
要理解 RoPE 的一切演进,我们必须首先理解它的工作原理。RoPE 将 d 维的词向量分为 d/2 对,每一对 (i,i+1) 都被视为一个复数(或一个 2D 向量),并根据其位置 m 进行旋转。
其旋转的"基准角速度"(频率)为: θi=10000−2i/d
我们可以将这 d/2 对维度想象成一个**"多频傅里叶时钟"**,它有 d/2 根指针,每根指针 (i) 都以自己不同的速度 (θi) 转动。
1.1 高频维度:"秒针" (The Second Hand)
- 对应: i 值较小(例如 i=0,1,...)
- 特性: θi 值大(接近 1),旋转极快。
- 作用: 在 4096 步的训练中,这根"秒针"可能已经转了成百上千圈。它不携带任何有意义的"绝对位置"信息。
- 模型学到了什么: 它只关心极短距离的相对位置 。例如,模型学到 m=10 和 m=11 之间,秒针旋转了(比如)90度。这个"90度"就是模型心中"相邻"的定义。
- 特性总结: 周期性 (Cyclical)、鲁棒 (Robust)、只关心局部相对关系。
1.2 低频维度:"时针" (The Hour Hand)
- 对应: i 值较大(例如 i=d/2−1)
- 特性: θi 值极小(接近 0.0001),旋转极慢。
- 作用: 在 4096 步的训练中,这根"时针"可能只从 12:00 缓慢转到了 1:00。
- 模型学到了什么: 它在训练范围内是近似单调的 。模型用它来感知全局的、粗粒度的绝对位置。例如,"12:00" 意味着"文档开头","12:30" 意味着"中段","1:00" 意味着"训练过的最末尾"。
- 特性总结: 单调性 (Monotonic)、脆弱 (Fragile)、承载全局绝对关系。
2. 问题的出现:"外推"为何会失败?
当模型在 0-4096 长度上训练后,我们让它去处理一个位于 m=5000 的词符时:
-
"秒针"(高频)的反应:
它继续旋转。在 m=5000 时,它可能指向"4:30"。这对它来说不是问题,因为在训练的几百圈里,它已经见过"4:30"无数次了。这不是"分布外"(OOD) 数据。
-
"时针"(低频)的反应:
它被迫从"1:00"(训练终点)继续转向"1:15"。这是灾难性的 OOD。模型在训练中从未见过"1:00"之外的角度,它的大脑"短路"了。它不知道这个"1:15"的向量代表什么,导致模型对全局位置的理解彻底崩溃。
结论: RoPE 的外推失败,根本上是低频维度的 OOD 灾难。
3. 演进一:位置插值 (PI) ------ "匀速放慢时钟"
位置插值 (Position Interpolation, PI) 是一种简单而巧妙的"作弊"手段。
- 思想: 我们不"外推"到 8192,而是把 0-8192 的坐标系 ,"压缩"回 0-4096 的安全区。
- 方法: m′=m×LnewLtrain。例如,缩放因子 s=4096/8192=0.5。
- 输入: 当真实位置 m=8192 时,模型计算的是 RoPE(m′=4096)。当真实位置 m=10 时,模型计算的是 RoPE(m′=5)。
- 比喻: 我们把整个"傅里叶时钟"的运行速度调慢了 2 倍。
3.1 PI 的成功与"致命缺陷"
-
成功:
它完美解决了低频 OOD 灾难。"时针"现在在 m=8192 时,刚好指向它熟悉的"1:00"终点,永远不会越界。
-
致命缺陷:
"秒针"也被迫放慢了 2 倍!
- 模型原本学到的是: m=10 和 m=11(相邻) → "秒针"转 90 度。
- 现在模型看到的是: m′=5 和 m′=5.5(内插后) → "秒针"只转了 45 度!
- 模型对"相邻"这个最基本概念的感知被稀释和破坏了。这导致模型在局部语法、近距离依赖任务上性能急剧下降,变得"模糊"不清。
4. 演进二:NTK 感知缩放 ------ "高频外推、低频内插"的觉醒
PI 的缺陷在于它对所有频率"一刀切"。NTK (Neural Tangent Kernel) 理论启发我们:高频和低频分量在神经网络中扮演不同角色,高频对精细结构至关重要。
NTK 感知缩放 (NTK-aware Scaling) 认识到,我们不应该去压缩位置索引 m,而应该去改变时钟的"齿轮" ,即改变基准角 θi。
-
思想: 我们希望"时针"被压缩(内插),但"秒针"保持原速(外推)。
-
方法: 它不缩放 m,而是去缩放旋转频率的"基座" (Base)。
原始基座 b=10000。 θi=b−2i/d。
新基座 b′=b×s(d/(d−2))( s 是缩放系数)。
-
比喻: 我们不是"放慢时间",而是**"更换了时钟的内部齿轮" 。通过改变基座 b,我们巧妙地拉平了频率谱**。其效果是:
- 低频(时针): 频率被大幅压缩,等效于"内插"。
- 高频(秒针): 频率几乎不变(或变化很小),等效于"外推"。
结论: NTK 方案是第一个在数学上实现"高频外推、低频内插"原则的方案,它通过修改频率基座 b 来代替修改位置 m。
5. 演进三:YaRN ------ "混合动力时钟"的最终形态
NTK 方案虽然原理精妙,但仍有损失。YaRN (Yet another RoPE extension method) 采取了一种更直接、更激进、也更符合直觉的策略,它完美地实现了我们讨论的混合方案。
YaRN 结合了 PI 和 NTK 的思想,并做出了关键改进:
-
频率分离 (Frequency Splitting):
YaRN 显式地将 d/2 个维度分为"高频"(秒针)和"低频"(时针)。
-
混合插值 (Hybrid Interpolation):
- 对于低频(时针)维度: 执行"内插" 。 m′=m×s。
- 对于高频(秒针)维度: 执行"外推" 。 m′=m。
- (注:YaRN 的实现比这更平滑,它使用了一个插值函数从 m 过渡到 m×s,但其核心思想就是区别对待)
-
注意力缩放 (Attention Scaling):
YaRN 发现,当上下文变长时,注意力 logits 的方差会改变。因此,它引入了一个与缩放因子 s 相关的温度系数 t,来动态调整 Attention Softmax,防止其过于"尖锐"或"平坦"。 Attention(Q,K)=Softmax(tdk QKT)。
YaRN 的比喻:"混合动力时钟"
如果说 PI 是"匀速慢放",NTK 是"更换齿轮",那么 YaRN 就是一个**"混合动力时钟"**:
- 它告诉**"时针" :"你必须使用 内插时间**( m′=m×s),以确保你永远在 12:00 到 1:00 的安全区内,保证全局位置感不错乱。"
- 它告诉**"秒针" :"你必须使用 真实时间**( m′=m),以确保你保持原有的转速,完美保留'相邻'90度的局部感知力。"
结论
RoPE 的演进之路,是一场在"保留局部细节"与"维持全局稳定"之间不断权衡的博弈。
-
RoPE:利用傅里叶思想,创造了"多频时钟"。
-
外推失败:暴露了"时针"(低频)的 OOD 脆弱性。
-
PI:通过"匀速慢放"(内插)解决了 OOD,但牺牲了"秒针"(高频)的局部精度。
-
NTK/YaRN :最终的领悟------我们必须区别对待:
- 用"内插"保护脆弱的低频,维持全局稳定。
- 用"外推"释放鲁棒的高频,保留局部细节。
这种"高频外推、低频内插"的混合策略,是目前 LLM 突破上下文窗口限制的最优解,它充分利用了傅里叶分解下不同频率分量的独特数学特性。