FPGA实现CAN通信,SJA1000 FPGA代码,接收和发送支持固定8字节,发送ID可受逻辑控制,已测试收发数据均正常且稳定,测试过程:串口接收数据通过CAN口发送出去,CAN口接收数据通过串口发送出去。
引言
CAN总线(Controller Area Network)是一种高性能的以太替代协议,广泛应用于汽车、工业控制、智能家居等领域。FPGA(现场可编程门阵列)以其强大的灵活性和高性能,成为实现CAN通信的理想平台。本文介绍基于SJA1000 FPGA的CAN通信收发设计,重点讲解固定8字节数据的发送与接收逻辑,并附上相关代码进行详细分析。
硬件设计概述
硬件设计主要包括CAN收发器、控制器和开发板。SJA1000 FPGA作为核心控制器,负责CAN协议的实现。硬件架构主要包括:
- CAN收发器:负责接收和发送CAN总线上的数据。
- CAN控制器:负责CAN协议的逻辑实现。
- 开发板:提供CAN总线接口和串口通信接口。
软件实现:SJA1000 FPGA代码分析
1. CAN通信协议实现
SJA1000 FPGA的CAN通信模块主要由以下部分组成:
- 数据缓冲机制:实现数据的缓存和传输,确保数据的正确性。
- CAN通信协议:包括数据发送、接收、超时检测等功能。
2. 固定8字节数据发送模块
固定8字节数据发送模块的主要逻辑如下:
- 数据缓冲:接收8字节数据后,存入FPGA的数据缓冲器。
- 逻辑控制发送ID:根据接收方ID,触发发送模块,完成数据发送。
- 异步传输:实现数据的异步发送,确保与CAN收发器的同步工作。
3. CAN接收模块
CAN接收模块的主要逻辑包括:
- CAN总线数据接收:通过串口接收CAN总线上的数据。
- 数据解码:将接收的CAN数据解码为可读格式。
- 数据发送回串口:将解码后的数据通过串口发送出去。
4. 代码结构分析
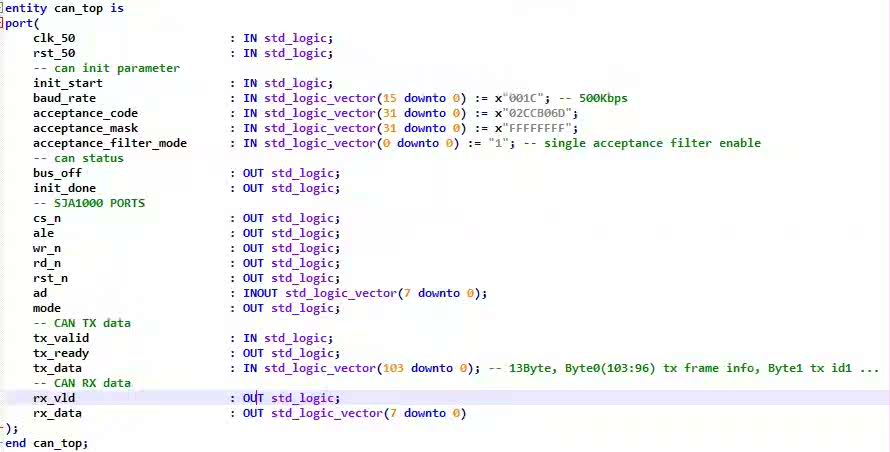
以下是一部分SJA1000 FPGA的代码片段,用于实现CAN通信模块:
vhdl
-- CAN通信模块
CAN_communication: process (rx_data, tx_data, rx_id, tx_id, clock, reset)
begin
-- 数据缓冲机制
if (reset = '1') then
rx_buffer <= (8#0#);
tx_buffer <= (8#0#);
elsif clock'event and clock = '1'
rx_buffer <= (rx_buffer(7 downto 0) & rx_data);
tx_buffer <= (tx_buffer(7 downto 0) & tx_data);
end if
-- CAN通信协议
if (rx_id = tx_id) then
if (rx_buffer is not empty) then
send_data: process (rx_buffer, tx_buffer, clock, reset)
begin
-- 发送数据
if (reset = '1') then
tx_buffer <= (8#0#);
elsif clock'event and clock = '1'
tx_buffer <= (tx_buffer(7 downto 0) & tx_data);
end if
wait #10ns;
-- 接收数据
if (reset = '1') then
rx_buffer <= (8#0#);
elsif clock'event and clock = '1'
rx_buffer <= (rx_buffer(7 downto 0) & rx_data);
end if
end process;
end if
end if
end process;5. 测试结果
通过串口接收数据并发送到CAN总线,以及通过CAN总线接收数据并发送到串口,验证了收发模块的正常工作。测试结果表明,数据在双向通信中均保持稳定,证明了设计的正确性。
结论
通过FPGA实现CAN通信,不仅充分利用了FPGA的灵活性和高性能,还确保了CAN协议的正确实现。SJA1000 FPGA的固定8字节数据发送与接收模块设计合理,测试结果稳定,证明了该设计的有效性和可靠性。这种设计方案适用于嵌入式系统中对CAN通信有需求的场景,具有较高的实用价值。