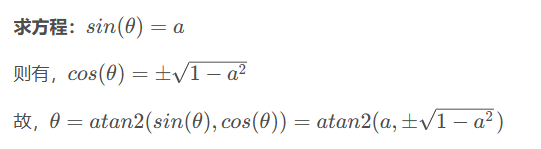
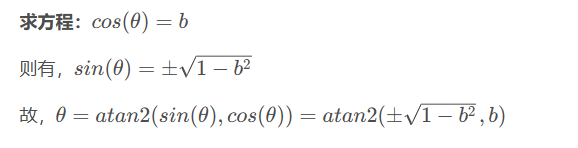
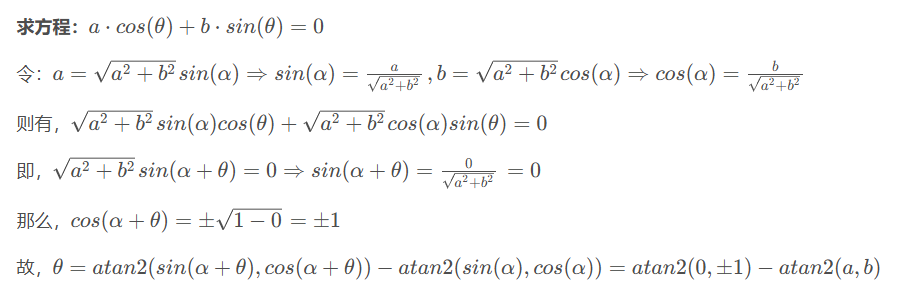
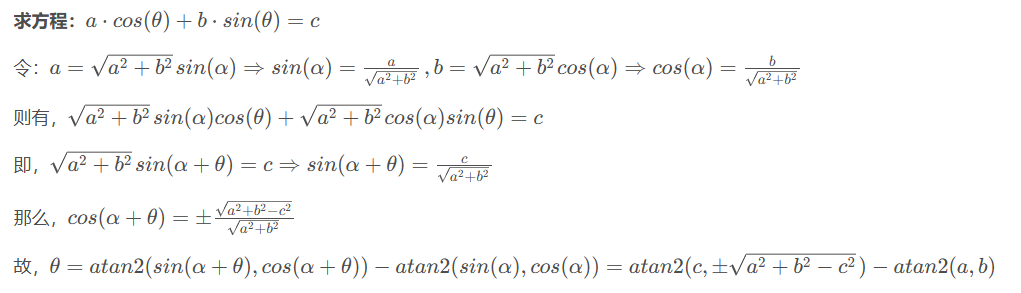
1.常见变换方程
2.matlab求解
matlab符号解求解:
将上式与下式联立:
求解代码:
Matlab
syms a b q1 c cq1 sq1 real
%cq1=cos(q1);sq1=sin(q1)
res=solve(a*cq1+b*sq1==c,cq1^2+sq1^2==1,[sq1,cq1])
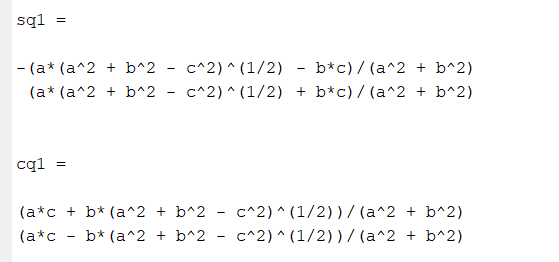
sq1=simplify(res.sq1)
cq1=simplify(res.cq1)求解出两组解,结果如下:
则: