使用matlab基于a星算法的多任务多AGV路径规划系统优化,环境是一个仓库,多个agv可以自由移动,考虑到通道占用问题,使用路径规划方法实现避障及最短路规划。 关键词:多任务 多agv 避障
在现代化的仓储物流场景中,多AGV(自动导引车)协同完成多任务的情况越来越常见。为了提升效率并避免冲突,基于A星算法的路径规划系统优化就显得尤为重要。今天咱们就来聊聊在Matlab环境下,针对仓库场景,如何实现这个优化。
仓库环境建模
仓库环境可以看作是一个二维的网格地图。我们可以用一个矩阵来表示这个地图,矩阵中的每个元素代表地图中的一个网格单元。0表示可通行区域,1表示障碍物区域。比如:
matlab
% 创建一个简单的仓库地图示例
warehouseMap = [0 0 0 0 0;
0 1 0 1 0;
0 0 0 0 0;
0 1 0 1 0;
0 0 0 0 0];这里我们构建了一个5x5的简单仓库地图,其中1所在位置就是障碍物。
A星算法核心原理与代码实现
A星算法是一种启发式搜索算法,用于在加权图中寻找从起始节点到目标节点的最短路径。它结合了Dijkstra算法的广度优先搜索策略和最佳优先搜索策略。其核心思想是通过评估函数 f(n) = g(n) + h(n) 来选择下一个要扩展的节点,其中 g(n) 是从起点到节点 n 的实际代价,h(n) 是从节点 n 到目标节点的估计代价。
matlab
function [path, cost] = aStarSearch(map, start, goal)
% 初始化
openSet = [start];
cameFrom = containers.Map;
gScore = containers.Map(num2cell(start), 0);
fScore = containers.Map(num2cell(start), heuristic(start, goal));
while ~isempty(openSet)
% 找到fScore最小的节点
[~, bestIndex] = min([fScore.values{:}]);
current = openSet(bestIndex);
openSet(bestIndex) = [];
if isequal(current, goal)
% 找到路径,回溯
path = reconstructPath(cameFrom, current);
cost = gScore(num2cell(current));
return;
end
% 扩展当前节点
neighbors = getNeighbors(current, map);
for i = 1:size(neighbors, 1)
neighbor = neighbors(i, :);
tentativeGScore = gScore(num2cell(current)) + 1;
if ~gScore.isKey(num2cell(neighbor)) || tentativeGScore < gScore(num2cell(neighbor))
cameFrom(num2cell(neighbor)) = current;
gScore(num2cell(neighbor)) = tentativeGScore;
fScore(num2cell(neighbor)) = tentativeGScore + heuristic(neighbor, goal);
if ~ismember(neighbor, openSet, 'rows')
openSet = [openSet; neighbor];
end
end
end
end
% 没有找到路径
path = [];
cost = Inf;
end
function h = heuristic(node, goal)
% 曼哈顿距离作为启发函数
h = abs(node(1) - goal(1)) + abs(node(2) - goal(2));
end
function neighbors = getNeighbors(node, map)
% 获取邻居节点
neighbors = [];
rows = size(map, 1);
cols = size(map, 2);
for i = -1:1
for j = -1:1
if ~(i == 0 && j == 0)
neighbor = node + [i j];
if neighbor(1) >= 1 && neighbor(1) <= rows && neighbor(2) >= 1 && neighbor(2) <= cols && map(neighbor(1), neighbor(2)) == 0
neighbors = [neighbors; neighbor];
end
end
end
end
end
function path = reconstructPath(cameFrom, current)
% 回溯路径
path = current;
while cameFrom.isKey(num2cell(current))
current = cameFrom(num2cell(current));
path = [current; path];
end
end上述代码实现了A星算法的核心部分。aStarSearch 函数实现了整个搜索流程,heuristic 函数定义了启发式函数(这里使用曼哈顿距离),getNeighbors 函数用于获取当前节点的邻居节点,reconstructPath 函数则是在找到目标节点后回溯路径。
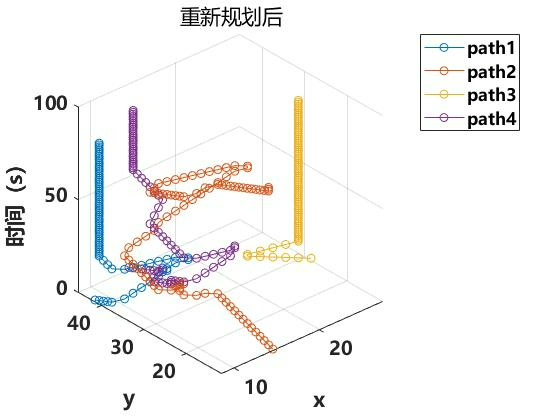
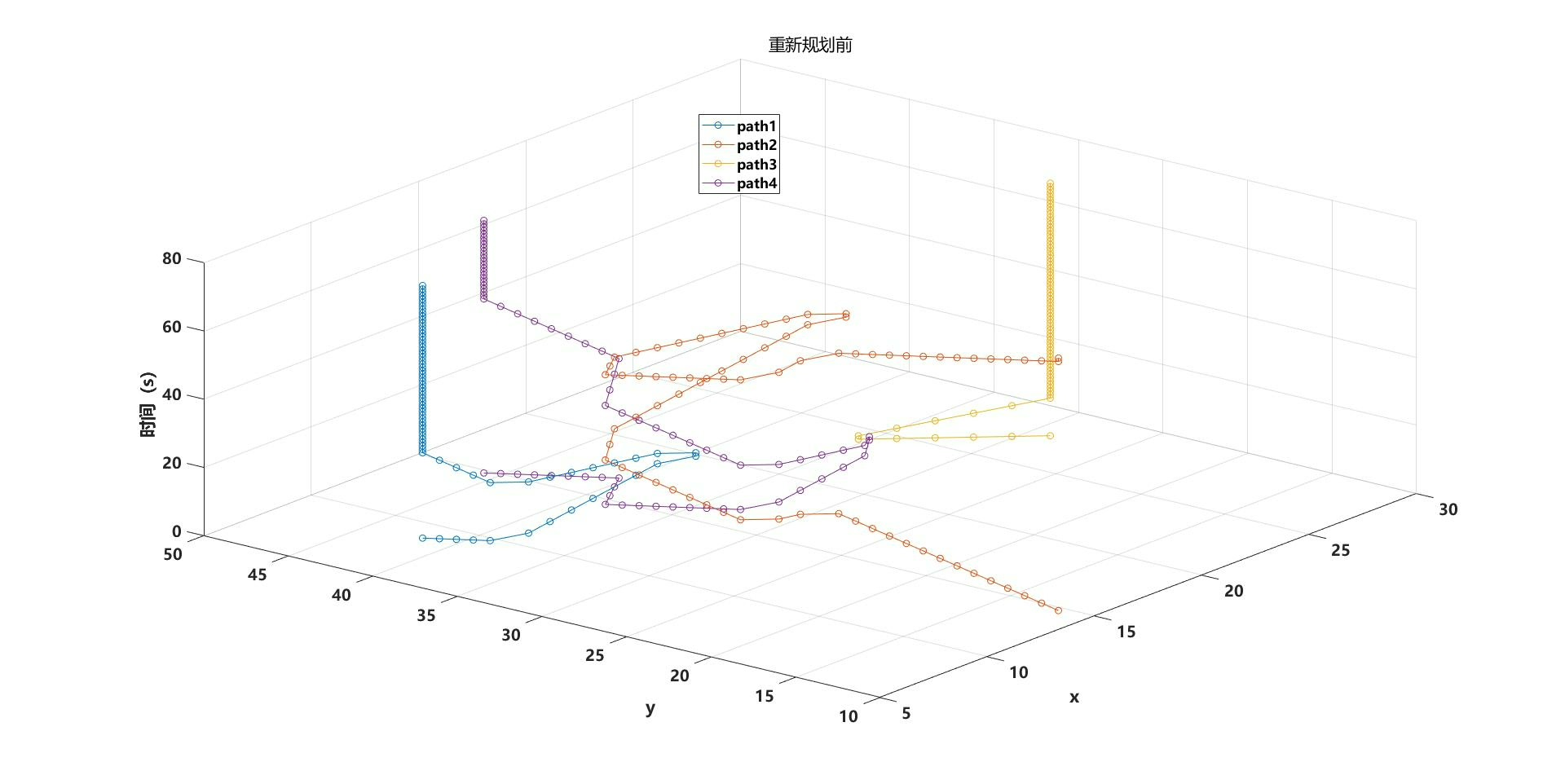
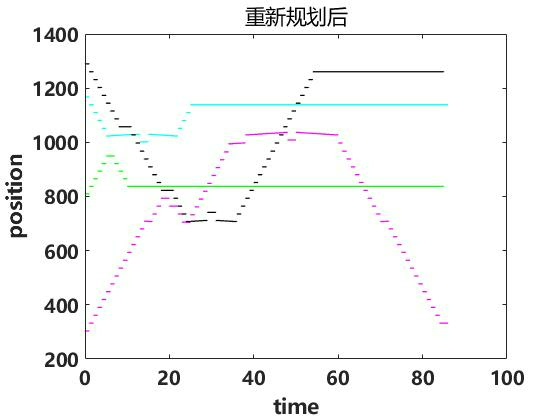
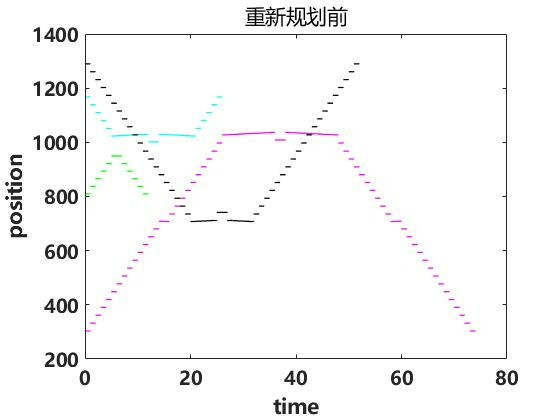
多AGV路径规划与避障
对于多AGV系统,我们不仅要为每个AGV规划路径,还要考虑通道占用和避障问题。一种简单的方法是为每个AGV依次规划路径,并在规划过程中,将已规划路径上的节点标记为临时障碍物,避免后续AGV重复经过。
matlab
% 假设多个AGV的起点和终点
startPoints = [[1, 1]; [1, 5]];
goalPoints = [[5, 5]; [5, 1]];
numAGVs = size(startPoints, 1);
map = warehouseMap;
for k = 1:numAGVs
[path, ~] = aStarSearch(map, startPoints(k, :), goalPoints(k, :));
if ~isempty(path)
% 将路径上的点标记为临时障碍物,避免其他AGV走
for i = 1:size(path, 1)
map(path(i, 1), path(i, 2)) = 1;
end
end
end这段代码展示了如何为多个AGV依次规划路径,并在规划过程中考虑避障。每个AGV规划完路径后,将路径上的网格标记为障碍物,防止其他AGV再次经过。
通过以上在Matlab环境下基于A星算法的多任务多AGV路径规划系统优化,我们可以有效解决仓库场景下多AGV自由移动中的避障和最短路规划问题,提升仓储物流的运作效率。当然,实际应用中还需要考虑更多的复杂因素,比如AGV的速度控制、实时动态环境变化等,这就有待我们进一步探索和优化啦。