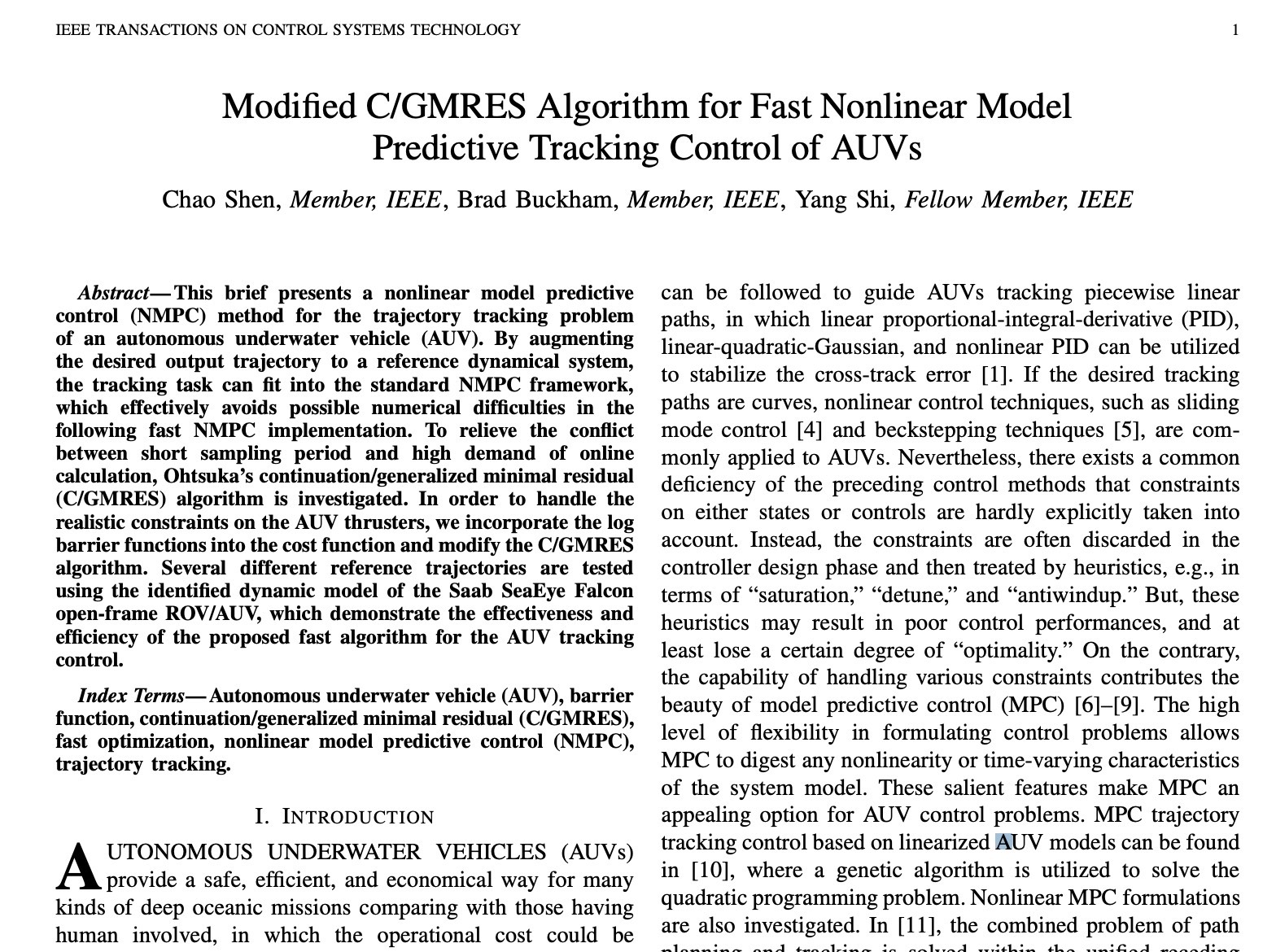
用于自动潜航器快速非线性模型预测跟踪控制的修正 C/GMRES 算法-306
在自动潜航器(AUV)的控制领域,快速且精准的非线性模型预测跟踪控制至关重要。今天咱们就来深入聊聊用于此的修正C/GMRES算法。
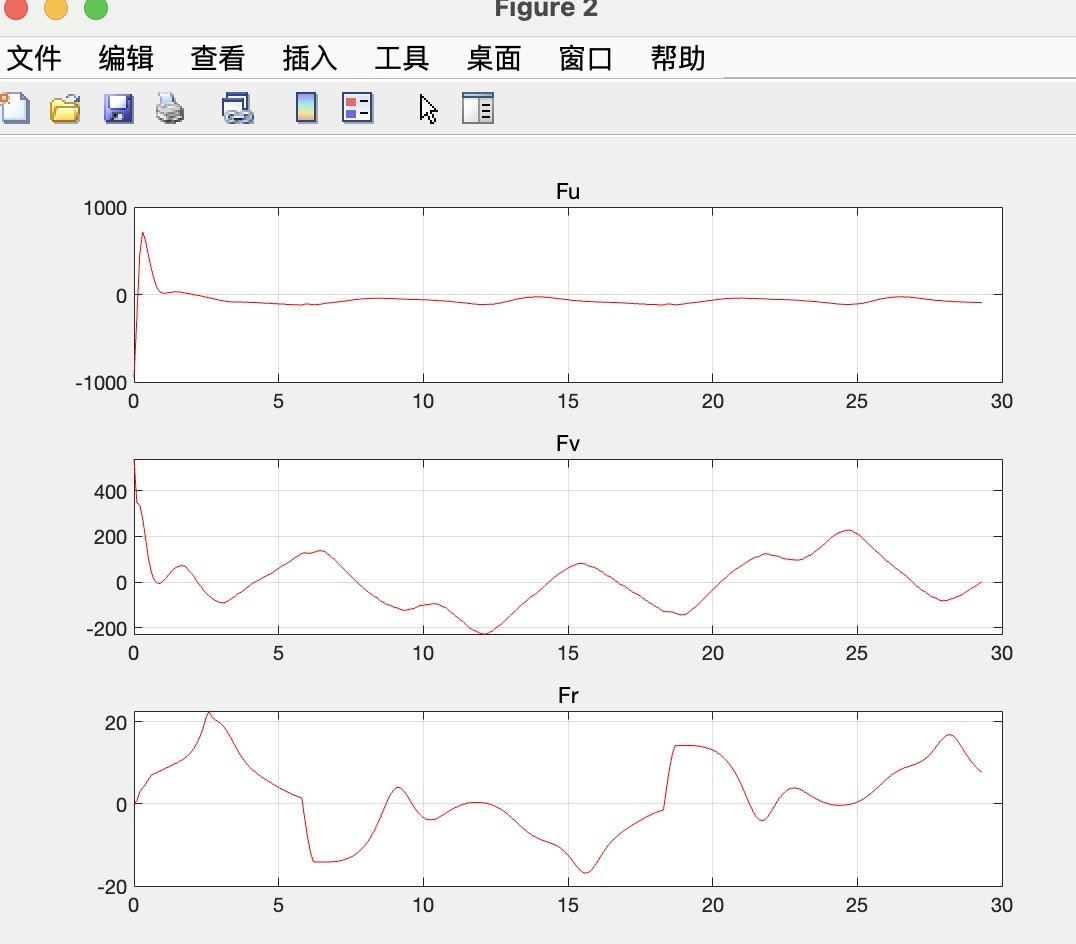
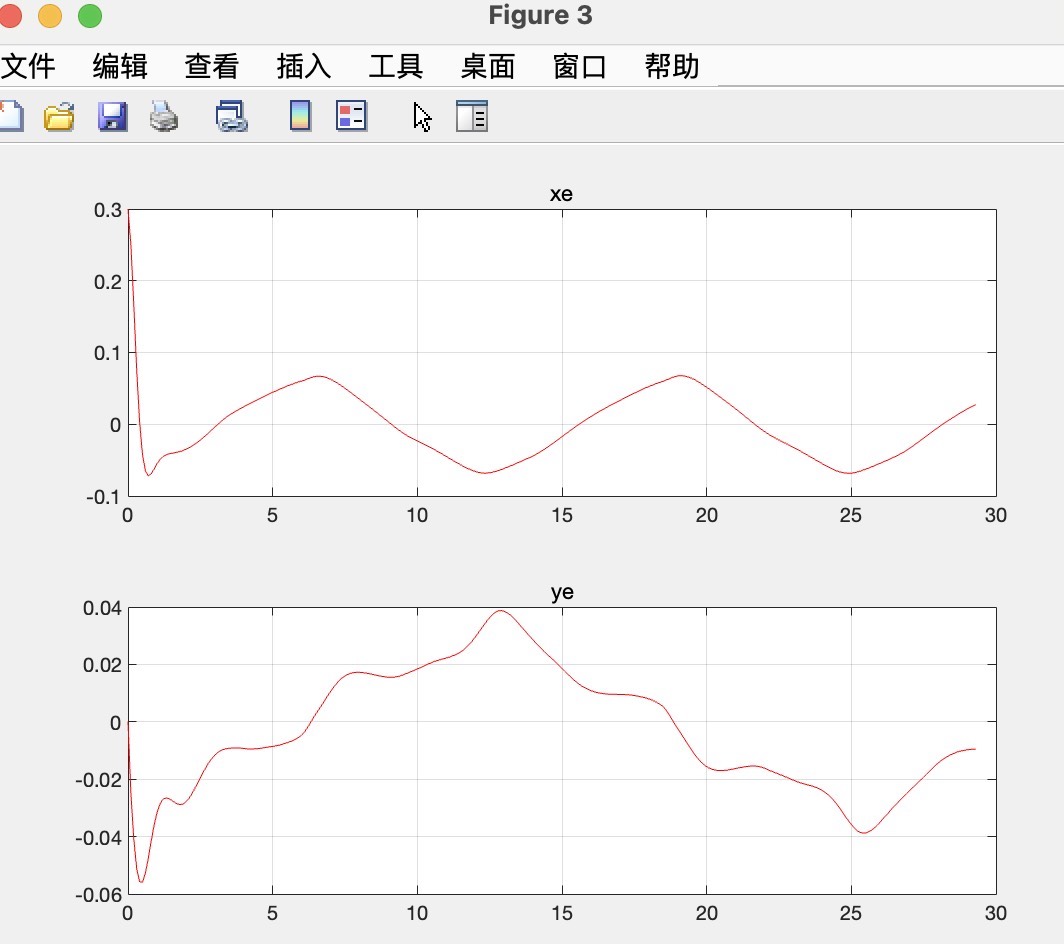
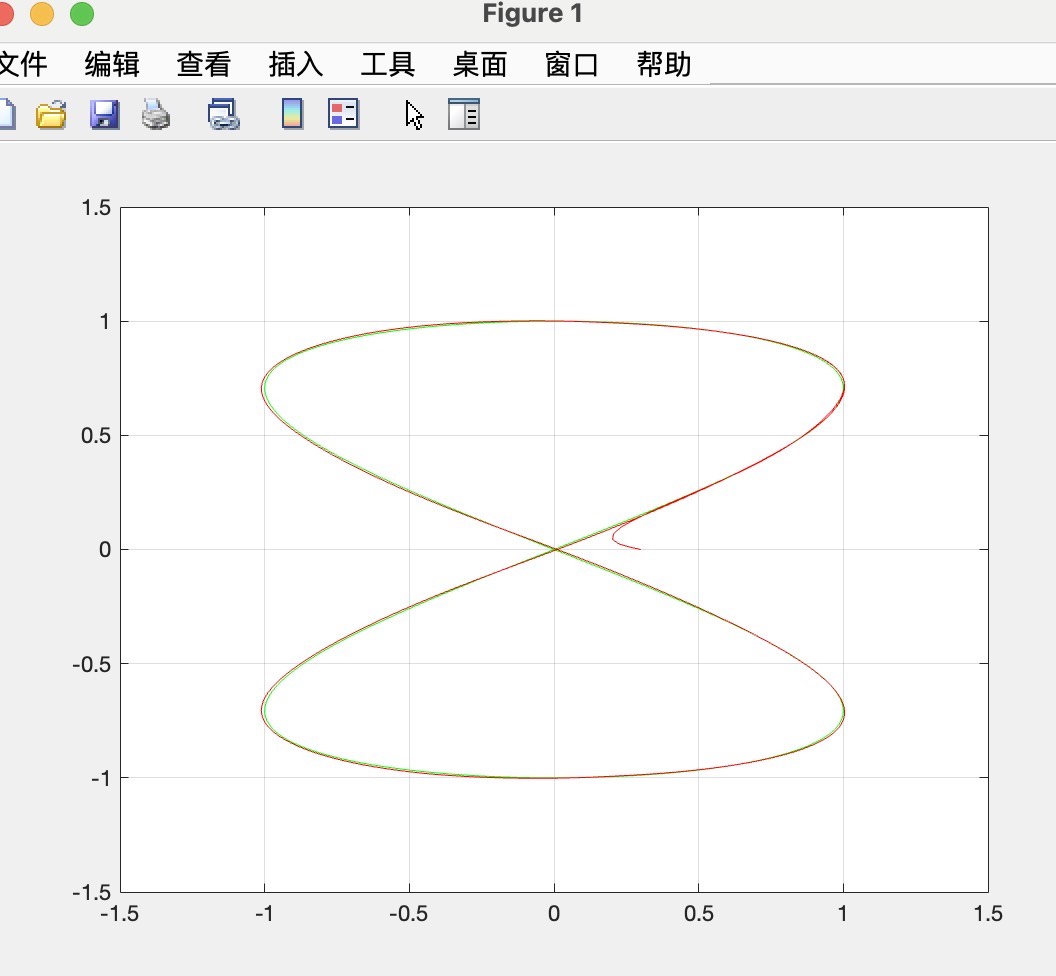
AUV在水下复杂环境中运行,其运动控制面临诸多挑战。非线性模型预测控制(NMPC)旨在通过对系统未来动态的预测,优化控制输入,以实现期望的轨迹跟踪。然而,传统算法在处理这类复杂的非线性优化问题时,计算量较大,效率难以满足实际应用需求,特别是在对实时性要求极高的AUV控制场景中。
这时候,修正C/GMRES算法就闪亮登场啦。GMRES(广义极小残差法)原本是用于求解大型稀疏线性方程组的迭代方法。但在AUV的非线性模型预测跟踪控制场景下,对其进行修正以适应特定需求就显得尤为重要。
我们来看看简单的代码示例(这里以Python伪代码为例帮助理解,实际应用可能用更适合的语言和库):
python
import numpy as np
# 定义一些假设的系统参数
n = 100 # 假设的系统维度
A = np.random.rand(n, n) # 系统矩阵
b = np.random.rand(n) # 右侧向量
def gmres(A, b, max_iter=100, tol=1e - 6):
m = len(b)
x = np.zeros(m)
r = b - np.dot(A, x)
beta = np.linalg.norm(r)
V = np.zeros((m, max_iter + 1))
V[:, 0] = r / beta
H = np.zeros((max_iter + 1, max_iter))
for k in range(max_iter):
w = np.dot(A, V[:, k])
for j in range(k + 1):
H[j, k] = np.dot(V[:, j].T, w)
w = w - H[j, k] * V[:, j]
H[k + 1, k] = np.linalg.norm(w)
if H[k + 1, k] < tol:
break
V[:, k + 1] = w / H[k + 1, k]
# 计算最小二乘解
y = np.linalg.lstsq(H[:k + 2, :k + 1], beta * np.vstack((np.eye(k + 1), np.zeros((1, k + 1)))), rcond=None)[0]
x = x + np.dot(V[:, :k + 1], y)
return x
# 这里假设修正部分是对系统矩阵A进行预处理
def precondition_A(A):
# 简单示例:这里可以是复杂的预处理操作,这里假设是取A的对角矩阵作为预处理器
return np.diag(np.diag(A))
preconditioned_A = precondition_A(A)
solution = gmres(preconditioned_A, b)在这段代码中,我们首先定义了一个基本的GMRES函数来求解线性方程组Ax = b。在AUV的应用场景里,这个方程组可能是由非线性预测模型离散化后得到的。而修正部分,我们通过precondition_A函数对系统矩阵A进行预处理,以加速GMRES的收敛速度。在实际的AUV控制中,预处理操作可能基于对AUV动力学模型的深入理解和分析,通过巧妙地构造预处理器,让GMRES算法在更少的迭代次数内达到收敛,从而满足快速控制的需求。
修正C/GMRES算法通过对传统GMRES算法的适应性改进,为AUV的非线性模型预测跟踪控制提供了更高效的解决方案,助力AUV在复杂水下环境中更加敏捷、精准地执行任务。它就像是给AUV装上了一个智能的"导航大脑",在提升控制性能的同时,也为水下探索等相关领域的发展注入了新的活力。
希望通过今天的分享,大家对用于自动潜航器快速非线性模型预测跟踪控制的修正C/GMRES算法有了更直观的认识。后续有机会咱们可以继续深挖更多相关的有趣技术点。