Head Unit Integration Guide (HUIG) 4.3
第 0 章:引言(Introduction)
0. 引言概述
当今的移动设备集成了尖端技术------包括最新的硬件与软件、高速移动网络,以及不断扩展的互联服务与应用程序生态。这些技术的融合,为用户提供了全新的方式来通信、享受数字内容、获取信息、学习,并探索周围世界。
然而,这些设备并非为驾驶场景设计。在驾驶过程中直接操作手机存在显著的安全风险。
为此,Android Auto (www.android.com/auto)应运而生。它实现了移动设备与车辆之间的无缝集成,使驾驶员能够通过一个更简单、更安全的车载界面,访问并控制移动设备上的技术功能。
本指南描述了如何通过 Android Auto Projection (AAP) 技术,使汽车车载信息娱乐系统 (IVI) 能够利用现代移动设备的计算能力、连接能力和应用生态。
本文件面向希望在其车机(Head Unit, HU) 的汽车信息娱乐系统开发团队,旨在帮助其通过 Android Auto 认证。
⚠️ 注意 :
本指南不涉及 AAP 协议底层实现细节 (如序列化格式、网络帧结构等),这些由 Google 提供的 Sender/Receiver 库 在 HU 与移动设备(MD)两端自动处理。
如需协议细节,请参考:
0.1 规范性用语约定(Conventions)
本文档中使用的关键词 "MUST" (必须)、"MUST NOT" (不得)、"REQUIRED" (必需)、"SHALL" (应)、"SHALL NOT" (不应)、"SHOULD" (建议)、"SHOULD NOT" (不建议)、"RECOMMENDED" (推荐)、"MAY" (可以)、"OPTIONAL" (可选)等,均遵循 IETF RFC 2119 标准 的定义。
- MUST / SHALL:表示绝对强制要求,违反将导致认证失败。
- SHOULD / RECOMMENDED:强烈建议遵循,以确保最佳用户体验。
- MAY / OPTIONAL:可选实现,不影响基本功能认证。
**0.2 关于 Android Auto Projection(AAP)
Android Auto Projection (AAP) 是连接移动设备与车辆的桥梁,使驾驶员能够通过车辆提供的物理人机交互界面(HMI)(如触摸屏、旋钮、语音按钮等)来访问移动设备的功能。
在 AAP 架构中:
- 移动设备 (MD)负责管理所有用户界面 (UI)、应用逻辑 、网络连接 及计算资源;
- 车机(HU)则作为显示与输入终端,接收来自 MD 的投影内容,并将用户操作反馈回 MD。
这种架构充分发挥了车辆与移动设备各自的优势,共同打造最优驾驶体验:
| 来源 | 提供的能力 |
|---|---|
| 车辆 HU | • 更适合驾驶场景的 HMI(如大按钮、语音优先) • 高精度车辆数据(如 GPS、轮速、档位、燃油状态等),提供更准确的驾驶环境上下文 |
| 移动设备(MD) | • 最新的计算硬件平台(如高性能 CPU/GPU) • 最新的操作系统与安全更新 • 高速移动网络(5G/4G)连接云端服务 • 快速迭代的软硬件生态(消费电子级更新节奏) |
✅ 核心理念 :"App 在手机跑,界面在车机显" ------ 手机是"大脑",车机是"眼睛和手"。
**0.3 传输层(Transport)
AAP 协议本身是传输无关 (transport-agnostic) 的,只要传输通道具备足够带宽与低延迟,即可运行。
目前官方平台支持的传输方式包括:
- USB 2.0:自 Android Auto 诞生起即支持,为有线连接标准;
- 无线局域网 (Wi-Fi):自 AAP v1.4 起支持,车机作为 Wi-Fi 接入点(AP),手机连接至 HU 建立点对点通信。
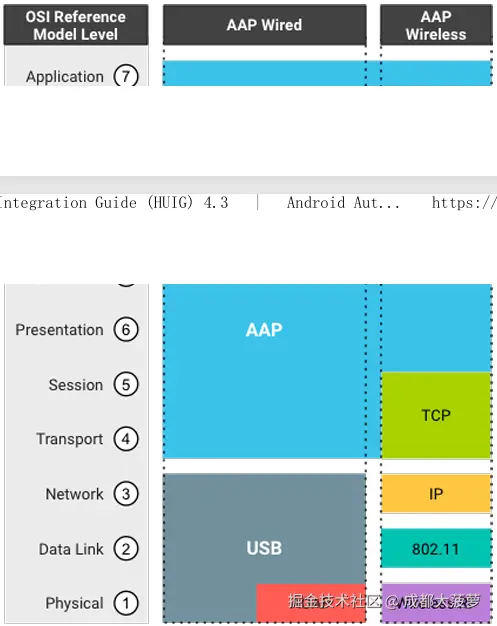
📌 图 0.1:Android Auto 网络栈 (原文配图,此处略)
展示了从物理层(USB/Wi-Fi)到 AAP 协议层,再到各功能通道的数据流向。
**0.4 通信通道(Channels)
AAP 协议定义了多个独立逻辑通道,用于在 MD 与 HU 之间高效传输不同类型的数据流:
| 通道名称 | 方向 | 功能说明 |
|---|---|---|
| Control(控制通道) | 双向 | 负责链路初始化、通道建立(如媒体、输入等子通道的协商) |
| Video Output(视频输出) | MD → HU | 传输 H.264 编码的视频流,用于在主中控屏显示 AAP 界面 |
| Audio Output(音频输出) | MD → HU | 传输媒体音频(如音乐、导航提示音),通过车载扬声器播放 |
| Vehicle Data(车辆数据) | HU → MD | 上传车辆传感器数据(如 GPS 位置、车速、转向角、燃油量等),供导航/应用使用 |
| Input(输入事件) | HU → MD | 将车机 HMI 输入(触摸、按键、旋钮、方向盘控制等)发送至 MD,驱动应用交互 |
| Microphone Audio(麦克风音频) | HU → MD | 传输车载麦克风采集的语音信号,用于语音搜索、通话等 |
| Bluetooth HFP(蓝牙免提) | 双向 | 专用于电话通话的音频通道(符合 Bluetooth Hands-Free Profile) |
| Application Status & Data(应用状态与数据) | MD → HU | 传输结构化元数据,如: • 导航指令(转弯提示、车道指引) • 媒体播放状态(歌曲名、进度、封面) |
💡 设计优势:通道分离避免了音视频与控制信令互相干扰,提升系统鲁棒性。
**0.5 车机(HU)组件与要求
支持 AAP 的车机系统需包含以下高层组件(与 AAP 相关部分):
| 组件 | 说明 |
|---|---|
| HU OS(车机操作系统) | 运行车载信息娱乐系统的底层 OS,如 Android Automotive OS、Linux、QNX、Windows Embedded 等 |
| OS 适配层(OS Adaptation Layer) | HU OS 与 AAP Receiver 之间的抽象层,负责: • 实现 AAP Receiver 的接口绑定 • 将 AAP 消息转换为 HU OS 原生调用(如 ALSA 音频、V4L2 视频、输入事件注入等) • Google 提供 Android 与 QNX 的参考实现源码 ,但不提供商业级二进制库 |
| Android Auto Projection Receiver(AAP 接收器) | HU 端的 AAP 核心实现,以可移植 C++ 源码形式 由 Google 提供给合作伙伴 • 通过 OS 适配层与 HU 的视频、音频、连接、输入等子系统交互 • 负责管理 AAP 会话生命周期、通道建立、错误恢复等 |
⚠️ 重要提示 :
本指南不涵盖 HU 完整软件栈(如 CAN 总线驱动、图形合成器、电源管理等),仅聚焦 AAP 集成相关部分。
**0.6 车辆类型(Vehicle Types)
AAP 可集成于以下类型的车辆信息娱乐系统:
| 车辆类型 | 定义 | 集成要求 |
|---|---|---|
| 乘用车(Car) | 无需商业驾照即可驾驶的车辆(如私家轿车、SUV) | ✅ 支持(R00-010) |
| 后装车机(Aftermarket HU) | 为乘用车设计的第三方替换主机 | ✅ 支持(R00-020) |
| 商用车/卡车(Truck) | 需要商业驾照驾驶的车辆(如货运卡车、巴士) | ✅ 支持(R00-030),但有特殊限制 |
针对卡车的强制要求(R00-060)
由于 Google 地图等导航应用未针对商用车辆优化(如限高、限重、危险品路线等),若 AAP 集成于卡车 HU,则:
-
每次启动 AAP 时 ,HU 必须 显示一条可关闭的原生免责声明,内容为:
"Some Android Auto navigation apps are not designed for commercial vehicles and may not be used for navigation."
("部分 Android Auto 导航应用并非为商用车辆设计,不可用于导航。")
-
例外 (R00-070):
若用户在某台手机上明确选择"不再显示" (如勾选 "Do Not Show Again"),则 HU 可记住该设备的偏好,后续连接时不再弹出该提示。
🌍 本地化要求 :免责声明文本需提供目标市场的官方语言翻译版本。
总结
第 0 章明确了 Android Auto Projection 的设计哲学 、技术架构 、通信模型 及适用范围,为后续章节的具体实现要求奠定了基础。开发团队需特别注意:
- 安全第一:所有设计围绕"减少驾驶分心"展开;
- 职责分离:MD 负责计算与逻辑,HU 负责交互与传感;
- 通道隔离:音视频、控制、数据独立传输,保障稳定性;
- 合规强制:卡车场景的免责声明是认证硬性要求;
- 参考实现:Google 提供 C++ 源码与 OS 适配参考,但需自行集成。