在C++开发中,我们经常使用std::vector作为动态数组的首选容器。但是你是否曾经想过,为什么有时候在处理大量数据时,程序的性能会不尽如人意?今天我们就来探讨一个简单却强大的优化技巧------reserve()方法。
首先了解,为什么需要扩容?
std::vector 是 C++ 中最常用的序列式容器之一,它封装了动态大小的数组,提供快速的随机访问。其核心特性在于能够自动管理存储空间 ,在需要时自动扩容,从而让用户无需关心底层内存分配的细节。 vector 在构造时通常会分配一块初始大小的连续内存。当用户通过 push_back 或 insert 等操作添加新元素,导致当前容量 (size) 即将超过已分配的内存总量 (capacity) 时,容器就必须进行扩容。因为其底层是连续内存,无法在原地简单地"接上"一块新内存,所以必须执行一套复杂的、开销较大的操作。
扩容的具体规则与过程
1. 触发条件
当 size == capacity 时,下一次需要增加新元素的操作(如 push_back, emplace_back, insert 等)就会触发扩容。
2. 基本规则:几何扩容(Geometric Growth)
C++ 标准并未严格规定 vector 的扩容因子(Growth Factor),这是一种有意的设计,为不同标准库实现留出优化空间。然而,所有主流实现(如 GCC 的 libstdc++, Clang 的 libc++, MSVC 的 STL)都遵循一个几何扩容的策略。
- 常见扩容因子 :1.5 或 2 。
- GCC (libstdc++) 和 Clang (libc++) :通常采用 2 倍扩容。
- MSVC (Microsoft STL) :通常采用 1.5 倍扩容。
扩容操作伪代码:
cpp
new_capacity = max(new_size, current_capacity * growth_factor);其中 new_size 是扩容后需要的最小大小(通常是 current_size + 1)。
3. 扩容的具体步骤
一旦确定新的容量,扩容过程分为以下几步,这些步骤都是自动完成的:
- 分配新内存 :在堆上分配一块新的、更大的连续内存空间,其大小为
new_capacity。 - 元素迁移(移动构造或拷贝构造) :
- C++11 之前 :将旧内存中的所有元素拷贝构造到新内存中。这意味着对于非平凡类型,会调用拷贝构造函数,开销较大。
- C++11 及以后 :如果元素的移动构造函数 是
noexcept(或者编译器判断为不会抛出异常),则会优先使用移动构造将元素"移动"到新内存,这通常比拷贝更高效。否则,为了保证"强异常安全"保证,会退回到拷贝构造。
- 销毁旧元素并释放内存:按顺序调用旧内存中所有元素的析构函数,然后释放原来的内存块。
- 更新内部指针 :将
vector内部的指向数据的指针指向新内存,并更新capacity和size(size会增加新加入的元素)。
4. 迭代器与引用失效
这是扩容带来的一个至关重要的影响:一旦发生扩容,所有指向原 vector 内存的迭代器、指针和引用都会立即失效。继续使用它们会导致未定义行为(Undefined Behavior)。这是一个非常常见的错误来源。
cpp
std::vector<int> vec = {1, 2, 3};
int& ref = vec[0]; // 引用第一个元素
auto it = vec.begin(); // 迭代器指向第一个元素
vec.push_back(4); // 假设这触发了扩容
// ref 和 it 现在已经失效!访问它们是未定义行为。
// std::cout << ref << *it; // 危险!为什么是 1.5 或 2?------ 扩容因子的数学分析
选择几何扩容而非固定大小扩容(如每次增加 10 个)是为了保证插入操作的均摊时间复杂度为 O(1)。扩容因子的大小是一个在时间和空间之间权衡的经典问题。
假设我们插入 n 个元素,扩容因子为 k。
- 拷贝操作次数:在达到 n 个元素的过程中,会发生大约 ( log_k(n) ) 次扩容。每次扩容时,需要拷贝的元素数量是 ( k^0, k^1, k^2, ..., k^m )(其中 ( k^m \approx n ))。
- 总拷贝次数 是一个等比数列求和,其和与 n 成正比。因此,均摊到每次
push_back操作上,时间复杂度是 O(1)。
比较 2 和 1.5:
-
k = 2 (2倍扩容):
- 优点:分配次数少,均摊常数时间的常数项较小。
- 缺点 :内存浪费严重 。新分配的内存永远比之前所有分配的内存总和还大,这导致最多可能有 50% 的内存未被使用(因为 ( 1 + 2 + 4 + ... + n/2 < n ))。在内存受限的系统中,这可能是个问题。
-
k = 1.5 (1.5倍扩容):
- 优点 :内存利用率更高 。经过多次扩容后,之前释放的内存块可以在未来被重新利用的可能性更大,因为新旧内存块的大小不会相差太远。理论上,最多约有 33% 的闲置内存。
- 缺点:分配次数稍多,均摊常数时间的常数项稍大,但在现代系统中,这个差异通常不显著。
正因为 1.5 在内存利用上更优,许多现代实现(如 MSVC、Facebook 的 Folly 库)倾向于选择它。
性能优化方式
由于扩容开销巨大,理解并主动管理 vector 的容量是高性能 C++ 编程的关键。
-
预分配空间:
reserve()如果你能提前知道vector最终会存放多少元素,最有效的优化就是使用reserve(size_type n)函数一次性分配足够的内存。cppstd::vector<int> vec; vec.reserve(1000); // 一次性分配1000个int的空间 for (int i = 0; i < 1000; ++i) { vec.push_back(i); // 这1000次push_back都不会触发扩容 } -
查看容量:
capacity()使用capacity()函数可以查询当前已分配的内存最多能容纳多少元素。 -
释放未使用内存:
shrink_to_fit()shrink_to_fit()是一个非强制性的请求,要求vector将容量减少到与其大小 (size) 相匹配。这可以节省内存,但实现可以忽略此请求。在 C++11 及以后,移动一个vector通常会将源vector置于"空"状态,其capacity()可能为 0。
什么是reserve()?
reserve()是std::vector的一个成员函数,它用于预分配容器的内存空间。其函数签名如下:
cpp
void reserve(size_type n);调用reserve(n)会告诉vector:"请提前为至少n个元素分配内存空间"。但这并不会改变vector的size(),只是改变了capacity()。
测试实验设计
为了验证reserve()的实际效果,我设计了两个版本的代码进行对比测试:
版本1:无预分配
cpp
void processData(std::vector<int>& data, size_t numElements) {
for (size_t i = 0; i < numElements; ++i) {
data.push_back(i); // 动态增长
}
}版本2:有预分配
cpp
void processData(std::vector<int>& data, size_t numElements) {
data.reserve(numElements); // 预分配内存
for (size_t i = 0; i < numElements; ++i) {
data.push_back(i);
}
}测试环境:插入1000万个整数元素,使用std::chrono进行精确时间测量。
测试结果数据
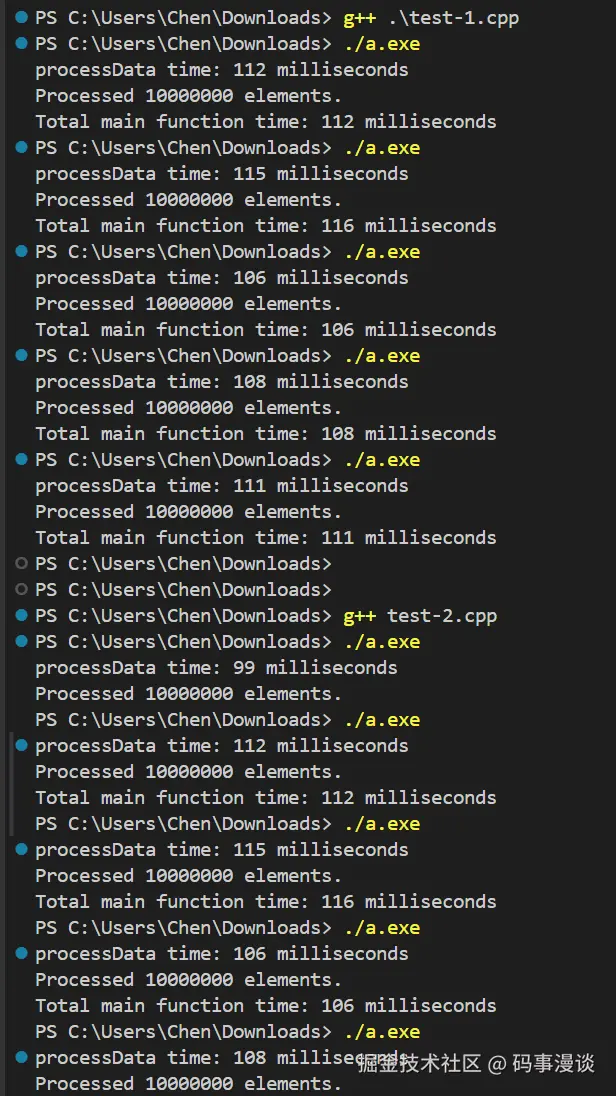
经过5次运行取平均值,得到以下数据:
| 测试版本 | 运行1 | 运行2 | 运行3 | 运行4 | 运行5 | 平均耗时 |
|---|---|---|---|---|---|---|
| 无预分配 | 112ms | 115ms | 106ms | 108ms | 111ms | 110.4ms |
| 有预分配 | 99ms | 92ms | 99ms | 99ms | 100ms | 97.8ms |
性能提升统计
| 指标 | 无预分配 | 有预分配 | 提升效果 |
|---|---|---|---|
| 平均耗时 | 110.4ms | 97.8ms | 减少12.6ms |
| 性能提升 | 基准 | - | 11.4% |
| 最快记录 | 106ms | 92ms | 提升13.2% |
| 最慢记录 | 115ms | 100ms | 提升13.0% |
为什么reserve()能提升性能?
1. 避免多次内存重新分配
没有使用reserve()时,vector的增长过程如下:
scss
初始容量 → 填满 → 重新分配(2倍) → 填满 → 重新分配(2倍) → ...对于1000万个元素,这个过程会发生大约25-30次重新分配!
2. 消除数据拷贝开销
每次重新分配都需要:
- 分配新的更大的内存块
- 将原有所有元素拷贝到新内存
- 释放旧内存
这个拷贝操作的时间复杂度是O(n),随着元素数量增加,开销呈线性增长。
3. 减少内存碎片
频繁的内存分配和释放会导致内存碎片,影响整体系统性能。
重新分配次数的实际验证
让我们通过一个简单的测试程序来验证重新分配的发生次数:
cpp
#include <vector>
#include <iostream>
void testReallocations() {
std::vector<int> data;
size_t numElements = 10000000;
size_t reallocations = 0;
std::cout << "初始容量: " << data.capacity() << std::endl;
for (size_t i = 0; i < numElements; ++i) {
if (data.size() == data.capacity()) {
reallocations++;
std::cout << "第" << reallocations << "次重新分配: "
<< data.capacity() << " → " << data.capacity() * 2 << std::endl;
}
data.push_back(i);
}
std::cout << "总重新分配次数: " << reallocations << std::endl;
std::cout << "最终容量: " << data.capacity() << std::endl;
}运行这个程序,你会看到vector经历了多次容量翻倍的增长过程。
何时使用reserve()?
推荐使用reserve()的场景:
- 已知确切数据量:当你提前知道要存储的元素数量时
- 批量数据插入:需要一次性插入大量数据时
- 性能敏感场景:对性能要求较高的算法或实时系统
- 避免内存碎片:在长时间运行的程序中减少内存碎片
使用示例:
cpp
// 场景1:从文件读取已知数量的数据
std::vector<DataRecord> loadDataFromFile(const std::string& filename) {
std::ifstream file(filename);
size_t recordCount = getRecordCount(file);
std::vector<DataRecord> records;
records.reserve(recordCount); // 预分配
DataRecord record;
while (file >> record) {
records.push_back(record);
}
return records;
}
// 场景2:处理大量计算结果
std::vector<double> computeResults(const std::vector<double>& input) {
std::vector<double> results;
results.reserve(input.size()); // 预分配
for (const auto& value : input) {
results.push_back(complexCalculation(value));
}
return results;
}注意事项
- 不要过度使用:如果数据量很小或者不确定,预分配可能没有必要
- 内存占用:预分配会立即占用内存,如果分配过多可能浪费资源
- 精确预分配:尽量提供准确的数量估计,避免分配过多或过少
cpp
// 不好的做法:过度预分配
data.reserve(1000000); // 但实际只用了1000个元素
// 好的做法:基于实际需求预分配
data.reserve(estimatedSize);其他容器的类似方法
除了std::vector,其他STL容器也提供了类似的预分配方法:
std::string::reserve()std::deque(虽然没有reserve,但可以预先插入元素来控制内存)std::unordered_map/set::reserve()(预分配桶的数量)
结论
通过实际的性能测试,我们证实了reserve()方法能够带来11.4% 的性能提升。这个看似简单的优化技巧,在处理大量数据时效果显著。
关键收获:
reserve()通过一次性内存分配避免了多次昂贵的重新分配- 减少了数据拷贝开销,提高了缓存友好性
- 在已知数据量的场景下,应该养成使用
reserve()的习惯 - 性能提升的幅度会随着数据量的增加而更加明显
记住这个简单的原则:如果你知道要存储多少数据,提前告诉vector! 这个小小的习惯改变,可能会在你的下一个项目中带来显著的性能提升。
测试环境:Windows, g++编译器,1000万int类型元素 测试完整代码如下
test-1.cpp
cpp
#include <vector>
#include <iostream>
#include <chrono>
void processData(std::vector<int>& data, size_t numElements) {
auto start = std::chrono::high_resolution_clock::now();
for (size_t i = 0; i < numElements; ++i) {
data.push_back(i);
}
auto end = std::chrono::high_resolution_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end - start);
std::cout << "processData time: " << duration.count() << " milliseconds" << std::endl;
}
int main() {
auto mainStart = std::chrono::high_resolution_clock::now();
std::vector<int> data;
size_t numElements = 10000000; // 模拟大量数据
processData(data, numElements);
auto mainEnd = std::chrono::high_resolution_clock::now();
auto mainDuration = std::chrono::duration_cast<std::chrono::milliseconds>(mainEnd - mainStart);
std::cout << "Processed " << data.size() << " elements." << std::endl;
std::cout << "Total main function time: " << mainDuration.count() << " milliseconds" << std::endl;
return 0;
}test-2.cpp
cpp
#include <vector>
#include <iostream>
#include <chrono>
void processData(std::vector<int>& data, size_t numElements) {
auto start = std::chrono::high_resolution_clock::now();
data.reserve(numElements); // 预分配内存
for (size_t i = 0; i < numElements; ++i) {
data.push_back(i);
}
auto end = std::chrono::high_resolution_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end - start);
std::cout << "processData time: " << duration.count() << " milliseconds" << std::endl;
}
int main() {
auto mainStart = std::chrono::high_resolution_clock::now();
std::vector<int> data;
size_t numElements = 10000000; // 模拟大量数据
processData(data, numElements);
auto mainEnd = std::chrono::high_resolution_clock::now();
auto mainDuration = std::chrono::duration_cast<std::chrono::milliseconds>(mainEnd - mainStart);
std::cout << "Processed " << data.size() << " elements." << std::endl;
std::cout << "Total main function time: " << mainDuration.count() << " milliseconds" << std::endl;
return 0;
}