本文基于大佬古月居的模型来使用,参考链接如下:
1、进入之前的工作空间下,下载模型
cd ~/XX_make/src2、下载功能包
git clone https://github.com/lmark1/velodyne_simulator.git
3、下载完成后使用catkin_make编译
4、编译成功后,安装相应的版本,本文是使用的ubuntu18.04,故而是melodic版本
sudo apt-get install ros-melodic-velodyne-*
5、编译完成后启动检验一下,能正常rviz显示就没问题
source ./devel/setup.bash
roslaunch velodyne_description example.launch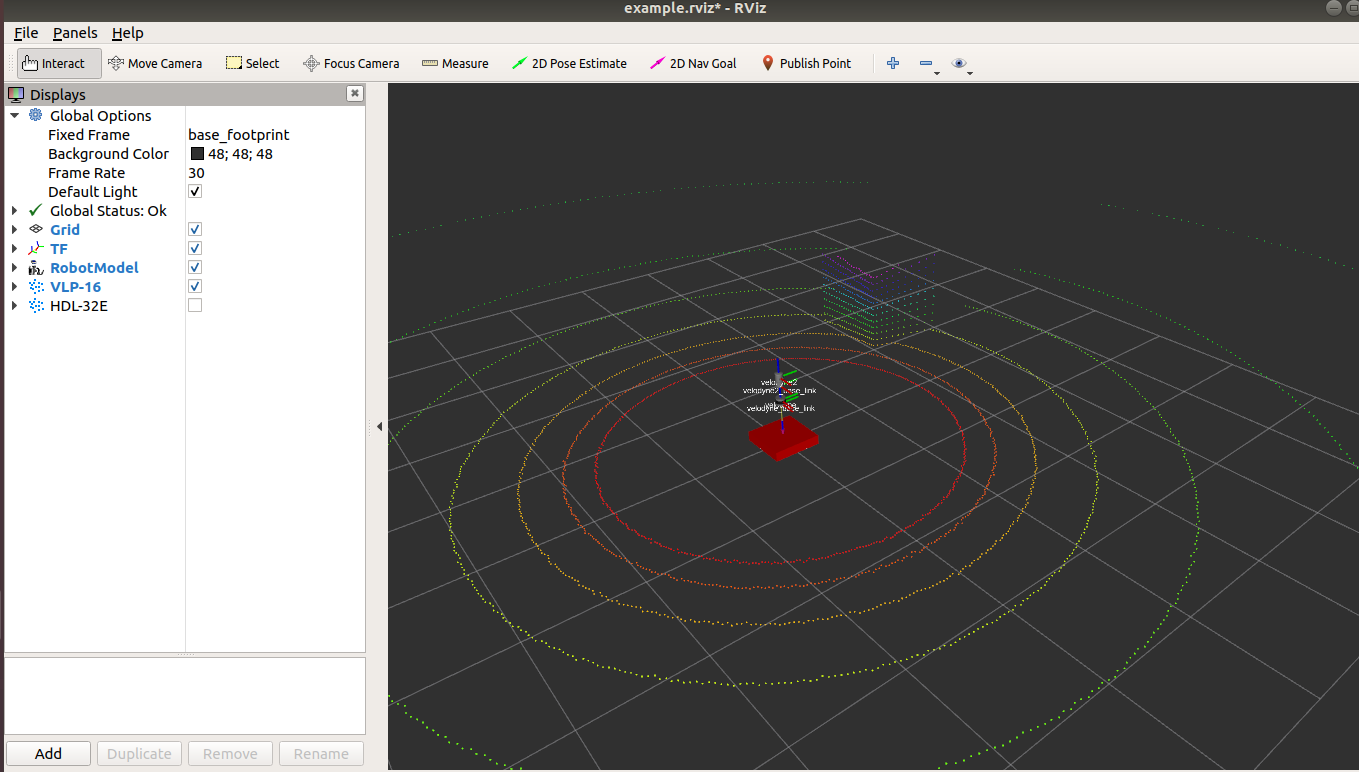
6、接下来就是将这个激光雷达集成到我们自己建立的小车模型上