导读
在救援、建筑或星球探测任务中,无人机常被寄予厚望------它能飞到人类够不到的地方,送去物资或工具。
但现实是:一架无人机的载重极其有限。于是科研人员想到让多架无人机一起"抬东西"。
问题来了,这个看似简单的合作,在空气中却异常复杂:每架无人机都通过缆绳拉着同一个物体,稍有不同步,整个系统就会像"空中秋千"一样剧烈晃动,失去稳定。过去的方法为追求安全,只能"慢飞":速度低、加速度小,根本谈不上敏捷。
来自代尔夫特理工大学的Sihao Sun团队决定打破这一限制。他们提出了一种基于轨迹的多无人机协同控制框架,让无人机队伍在空中既能稳稳抬起重物,又能快速飞行、甚至穿越狭窄通道。
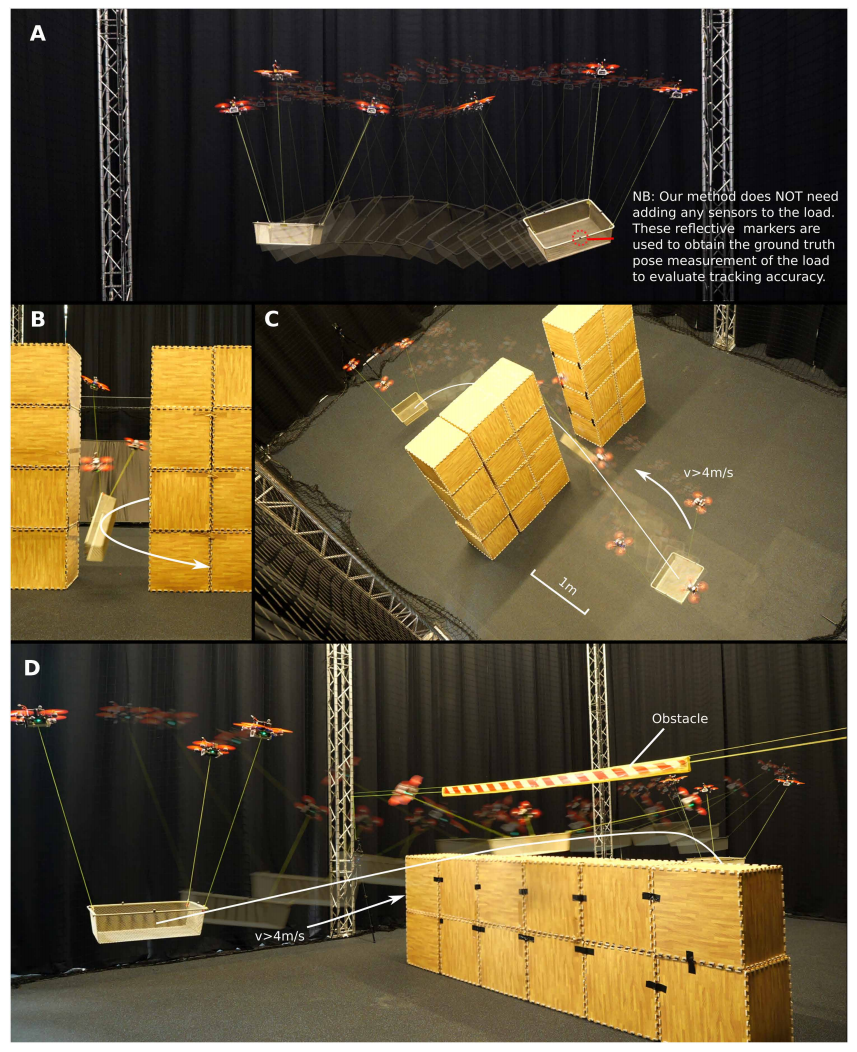
图1|该研究提出了一种使用多架四旋翼无人机悬挂负载的方法。(A) 该方法实现了对缆绳悬挂负载的敏捷全姿态控制。(B-D) 四旋翼能够动态控制负载姿态,并成功飞行通过狭窄通道和水平裂缝
论文出处:Science Robotics202**5
*论文标题:*Agile and cooperative aerial manipulation of a cable-suspended load
*论文作者:*Sihao Sun, Xuerui Wang, Dario Sanalitro, Antonio Franchi, Marco Tognon, Javier Alonso-Mora
论文地址:**https://www.science.org/doi/epdf/10.1126/scirobotics.adu8015
传统控制方法把问题拆成层层指令------上层算力、下层执行。这种"级联结构"在理论上可行,但当系统加速到高速飞行时,外层的指令频率跟不上内层响应,极易失稳。
Sun团队的思路是:别再分层,让系统整体规划未来几秒的动作。
他们构建了一个"全身运动规划器",实时求解整个多机系统的动力学方程,把每架无人机的姿态、推力、缆绳张力都考虑进去,在十几毫秒内规划出未来2秒的可行轨迹。
这条轨迹并不是单一目标点,而是一整条可预测的路径,会不断在10 Hz频率上更新。随后,每架无人机机载的小型计算机(Raspberry Pi 5)会接收这条轨迹,用**非线性动态反演控制(INDI)**方法跟踪执行。
INDI能即时利用IMU测得的加速度来估算缆绳张力并进行补偿,让无人机像拥有"身体感觉"一样自行平衡载荷,无需在货物上加任何传感器。这一整套机制的本质,是把"群体协作"转化为"个体沿预测轨迹飞行",从而在动态中保持整体稳定。
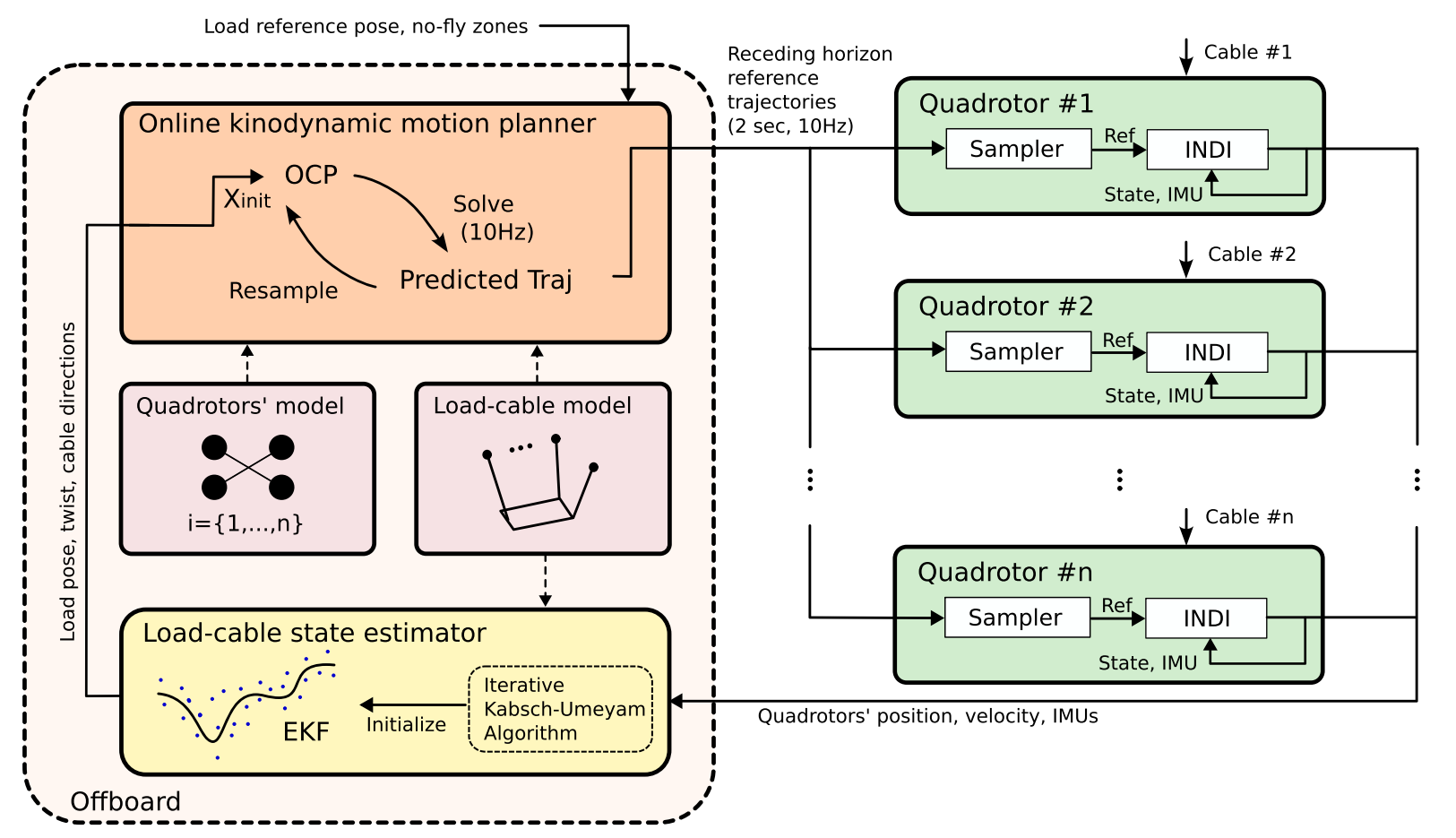
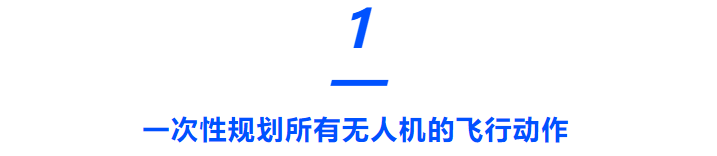
图2|方法概览:该框架包括一个基于轨迹的运动规划器,每10 Hz实时求解OCP,生成四旋翼的回溯轨迹。OCP使用整个系统的动力学,包括四旋翼模型和缆绳负载模型。负载的姿态、扭转和缆绳方向通过基于EKF的估算器获取。初始状态的其余部分(如缆绳张力和方向的高阶导数)通过重新采样生成的轨迹避免了四旋翼振荡运动

在线全身轨迹规划
为了提高系统的灵活性和稳定性,团队摒弃了传统的"级联控制"方法,转而采用在线动态规划。他们提出的在线全身轨迹规划框架基于有限时间最优控制(OCP),每隔100ms实时更新轨迹,生成未来两秒内的运动路径。该框架考虑了无人机与负载之间的动态耦合关系、推力限制、缆绳张力和障碍物避让等多个约束。通过这种回溯式预测****方法,无人机不仅能高效规划未来动作,还能处理时效性强的复杂任务,尤其是在大加速度飞行过程中,避免了传统方法在高频指令下的不稳定现象。更重要的是,这个规划过程无需依赖负载上的额外传感器,提升了实际应用中的可行性和灵活性
图3|快速轨迹跟踪表现:该图对比了研究方法与两种基线方法在快速轨迹跟踪中的表现。(A) 在跟踪8字形快速轨迹时,研究方法在速度达到5 m/s、加速度达到8 m/s²的条件下,依然能够精确跟踪,表现出比传统方法更高的稳定性和灵敏度。(i) 飞行路径展示了负载质心的轨迹;(ii) 和(iii) 进一步展示了在跟踪过程中,研究方法与基线方法在位置和姿态上的跟踪误差对比。(B) 在推力限制的实验中,尽管最大推力受到限制,研究方法仍能有效调整轨迹,保持稳定性,远超传统方法的性能
无传感器负载估计
与传统方法需要在负载上安装光学标记或传感器不同,Sun团队提出了基于扩展卡尔曼滤波(EKF)的负载状态估计器。这个估计器结合了无人机的IMU数据和位置估计,通过动态模型推算出负载的姿态、角速度和缆绳方向。通过IMU测量捕捉缆绳张力和外部扰动,系统能实时修正负载状态,避免了对负载上的复杂硬件依赖,极大简化了操作和部署过程。即使在负载质量未知或存在额外扰动(如篮球等"晃动"负载)的情况下,系统依然能够精确地估算负载的状态并保持稳定飞行。这一创新显著提高了系统的鲁棒性,使得多机协同任务更具实用性和可操作性。

图4|该图展示了在负载模型不确定性和通信延迟的条件下,研究方法的鲁棒性。(A) 在各种负载模型不匹配和通信延迟的情况下,研究方法依然能保持较低的跟踪误差,展示了它在不完全信息下的优越性能。(B) 通过实际实验,系统在负载模型不匹配的情况下(如放入篮球引起的质量偏差)仍然能够成功跟踪轨迹,证明了方法对负载不确定性的高度适应性
高鲁棒性控制
为了确保在复杂环境下的高鲁棒性,团队的控制算法采用了非线性动态反演(INDI)技术来应对实时的缆绳张力变化与外部扰动。与传统的基于预设轨迹的控制不同,INDI能够即时补偿来自缆绳的力和外部扰动,如风干扰或模型不准确性。该控制器结合了差分平坦性的特性,可以在不需要高频负载测量的情况下,稳定地跟踪动态轨迹。通过调整每架无人机的推力指令和姿态角度,INDI确保了整个系统在高速度、高加速度情况下依然能够保持稳定,且不会因外部干扰(如风速高达5 m/s)或模型误差导致系统失控。实验数据表明,这种高鲁棒性控制方法在各种不确定因素下均表现出色,能确保系统在现实任务中的高可靠性和高灵活性。
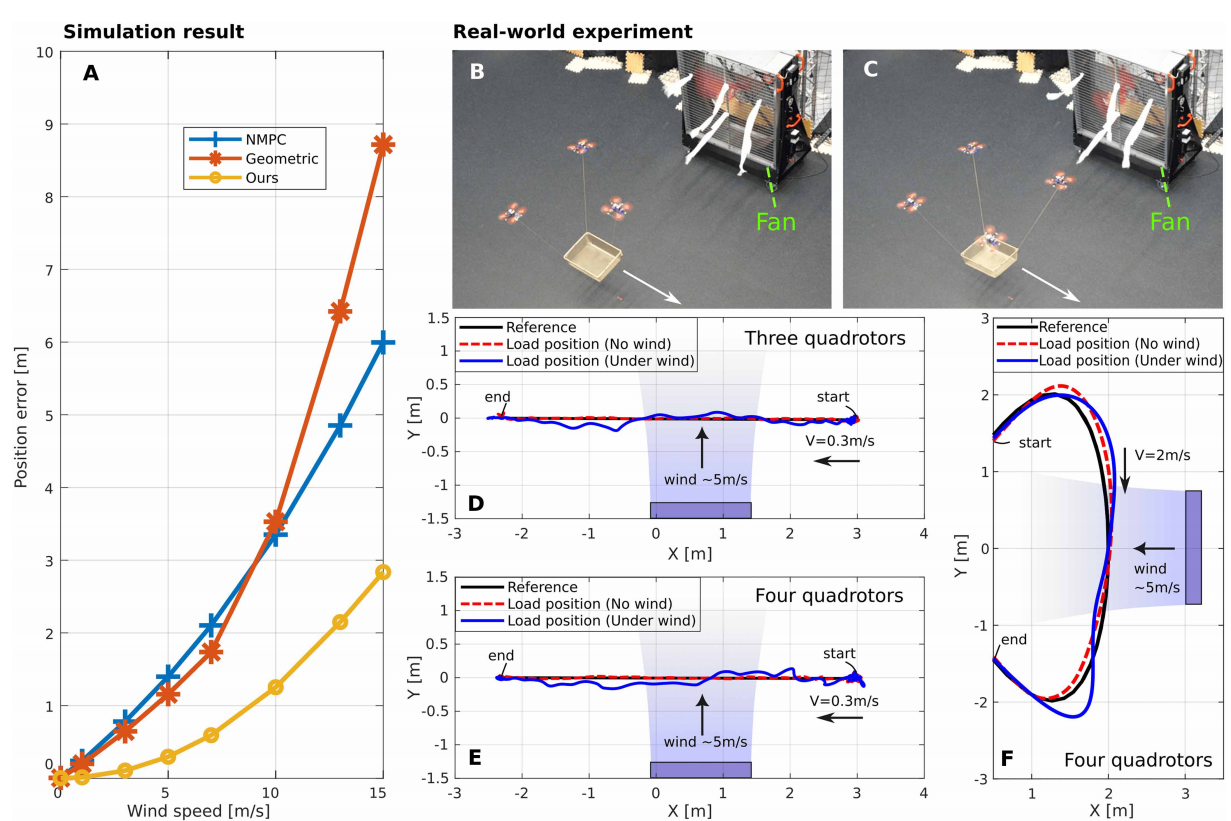
图5|这组图对比了风干扰条件下,研究方法与基线方法的性能。(A) 在仿真中,随着风速的增加,研究方法在5 m/s风速下保持了较低的跟踪误差,而传统方法在相同条件下则表现较差。(B) 和(C) 展示了在实际风场中,四旋翼系统在风速5 m/s下,依然能够成功完成轨迹跟踪任务,证明了该方法对外界扰动的高鲁棒性。(D) 和(F) 展示了四旋翼在风场中跟踪复杂曲线路径的表现,进一步验证了系统的动态适应能力
团队在实验室中使用三架改装自Agilicious平台的无人机,协同搬运1.4 kg的负载。
在"8字形"飞行测试中,它们以最高5 m/s的速度和8 m/s²的加速度完成复杂轨迹,而传统几何控制和NMPC方法在同样条件下均出现失稳。
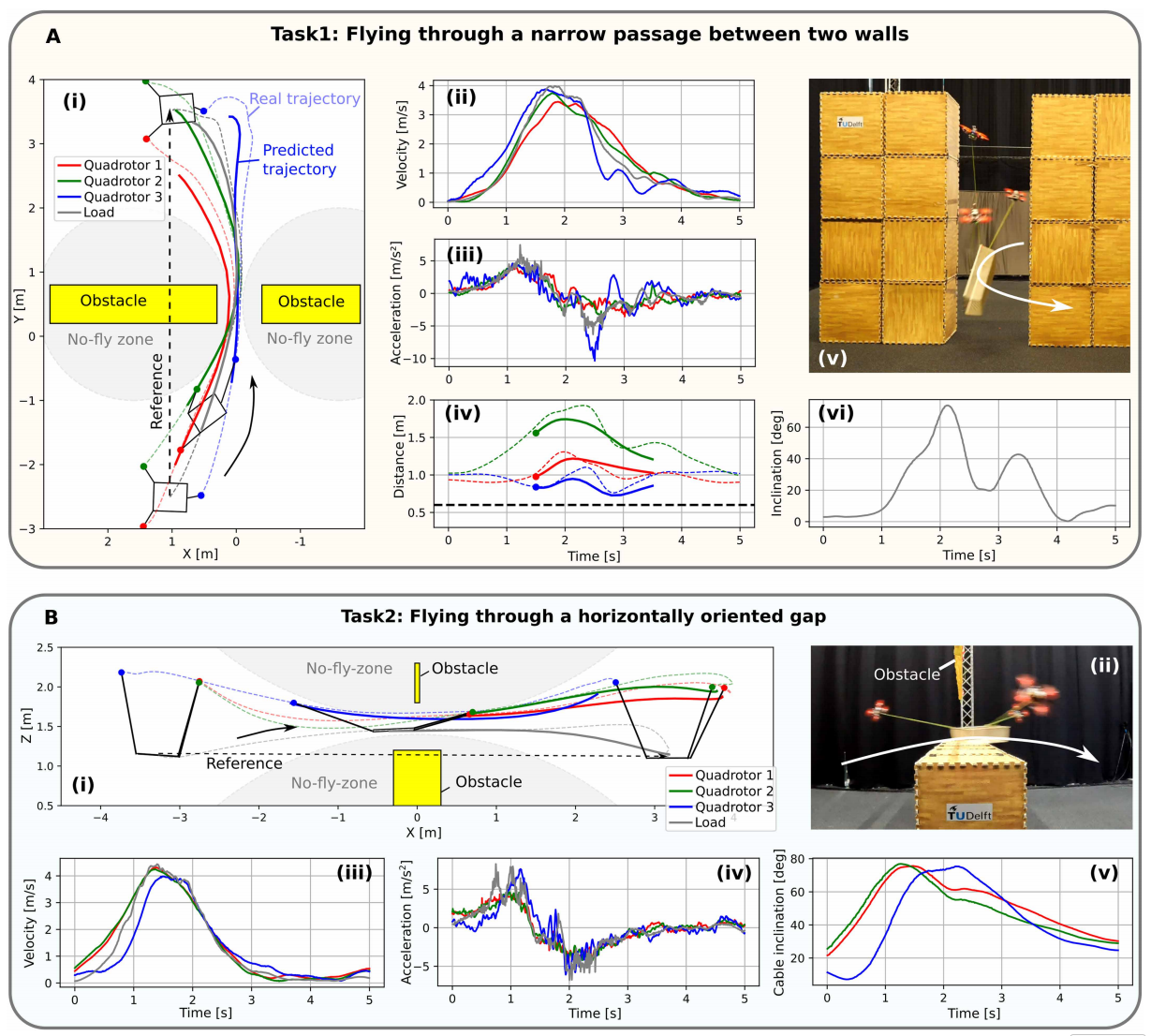
图6|这组图展示了多旋翼系统在复杂环境中的障碍物避让能力。(A) 任务1中,系统需要通过两墙之间的狭窄通道。(i) 负载质心与三架四旋翼的预测轨迹表明,系统通过调整姿态成功飞行。(ii) 和(iii) 展示了飞行过程中速度和加速度的变化,验证了方法在动态环境中的高适应性。(B) 任务2中,系统飞行通过一个水平裂缝,证明了该方法不仅能保持稳定,还能在复杂的空间中迅速调整姿态,以避免碰撞。这些结果展示了研究方法在高速、复杂环境中的高鲁棒性和灵活性
在受限条件下(降低推力上限),系统会自动调整曲率以避免超载,表现出"自我保护"的能力。
更惊艳的是障碍实验:
● 在垂直0.8 m的狭缝中,系统自动让负载倾斜70°"侧身挤过";
● 在水平0.6 m高的裂缝中,无人机展开、拉平缆绳,靠动量飞跃通过,仅用1.2 秒。
在风场与载荷不确定实验中,它能在风速5 m/s环境下稳定飞行,甚至在负载里放入一个"晃动的篮球"造成重心偏移后,仍能完成轨迹跟踪。
整体性能相比现有方法的加速度提升约八倍,位置误差控制在0.2 m以内。

这项研究让多无人机协同吊挂任务从"谨慎搬运"迈向"高速作业"。
它展示了一种从动态规划到执行控制全闭环优化的思路:未来,无人机群不只会飞,更能在空中"协作搬运、快速建构、精准救援"。
Sun团队的工作或许正揭示了未来空中机器人的趋势------当算法足够聪明,敏捷与安全不再冲突。
你觉得未来的无人机,能否在灾区上空像"会飞的施工队"那样协同作业?