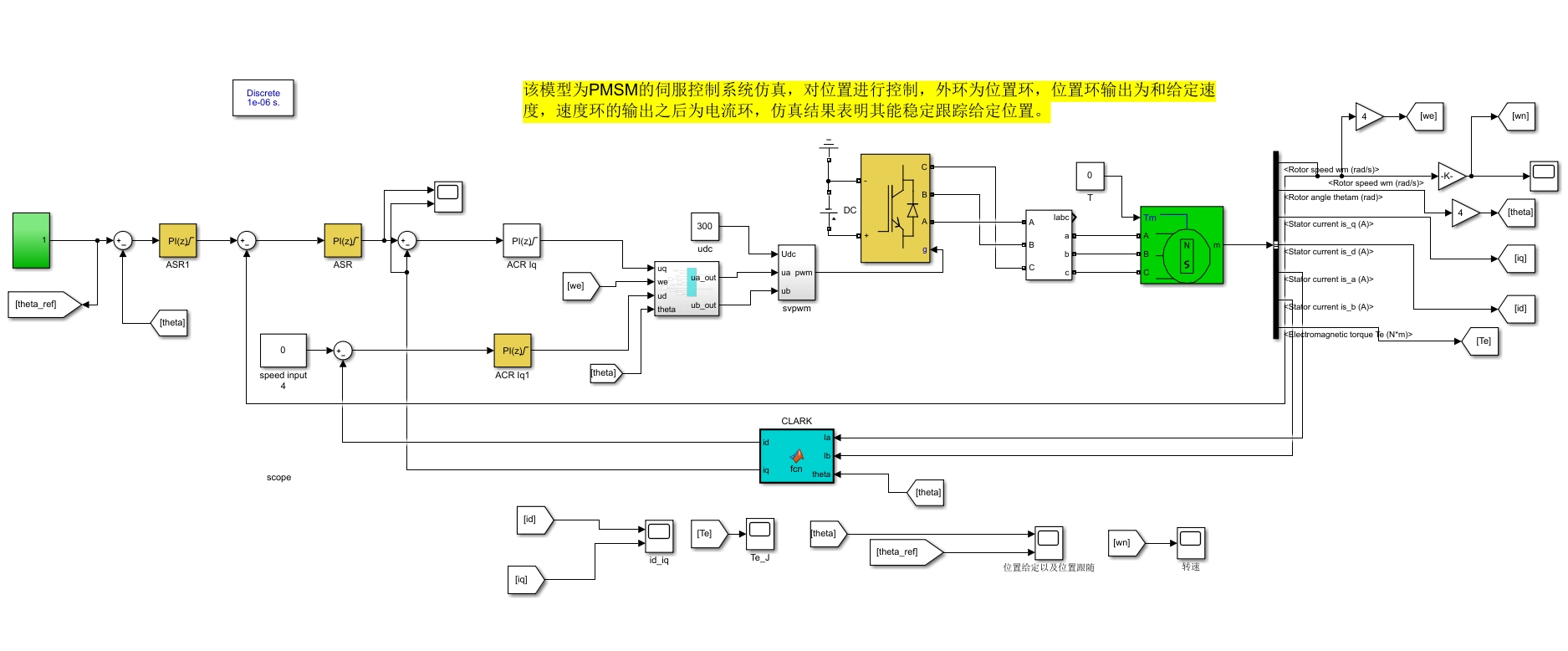
该模型为PMSM的伺服控制系统仿真,对位置进行控制,外环为位置环,位置环输出为和给定速度,速度环的输出之后为电流环,仿真结果表明其能稳定跟踪给定位置。
永磁同步电机(PMSM)的伺服控制在工业自动化领域是块硬骨头。今天咱们聊聊怎么用三环控制架构实现位置跟踪,重点看看每个环节的代码实现------毕竟再好的算法也得落地成代码才有意义。
先看控制架构的整体设计(配图:控制结构框图)。最外层是位置环,中间是速度环,最内层是电流环。这种分层结构就像洋葱一样,一层包裹一层,外环的输出是内环的输入。这种设计的好处是解耦了不同时间尺度的控制目标。
位置环的PID实现有个小细节值得注意:
python
class PositionController:
def __init__(self, Kp, Ki, Kd):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.prev_error = 0
self.integral = 0
def update(self, target, actual, dt):
error = target - actual
self.integral += error * dt
derivative = (error - self.prev_error) / dt
output = self.Kp*error + self.Ki*self.integral + self.Kd*derivative
self.prev_error = error
return output # 作为速度环的输入这里积分项的处理需要注意抗饱和问题。实际项目中我们会给积分项加个限幅,但仿真时为了简化暂时没加。参数Kp=15,Ki=0.5,Kd=2时响应曲线最平滑。
速度环的代码看起来差不多,但物理意义完全不同:
matlab
function speed_ref = speed_control(current_speed, target_speed)
persistent integral error_prev
if isempty(integral)
integral = 0;
error_prev = 0;
end
Kp = 120;
Ki = 35;
Kd = 5;
error = target_speed - current_speed;
integral = integral + error * 0.001; % 假设采样时间1ms
derivative = (error - error_prev)/0.001;
speed_ref = Kp*error + Ki*integral + Kd*derivative;
error_prev = error;
end注意这里速度环的输出是电流环的q轴参考电流。参数整定有个小技巧:先关掉积分项调Kp,直到出现轻微震荡,再引入微分项来抑制。
电流环的实现就比较有意思了,这里用到了Clarke和Park变换:
c
// dq轴电流控制
void current_loop(float id_ref, float iq_ref) {
ClarkeTransform(); // 三相转两相
ParkTransform(theta); // 静止转旋转
float vd = pid_d.update(id_ref - id_actual);
float vq = pid_q.update(iq_ref - iq_actual);
InverseParkTransform(theta); // 旋转转静止
SVM_Generate(v_alpha, v_beta); // 空间矢量调制
}这段C代码里藏着磁场定向控制的核心思想。特别要注意Park变换的角度θ需要实时获取,这里我们用的是编码器反馈的位置信号。调试时遇到过相位滞后导致震荡的情况,最后通过角度补偿解决了。
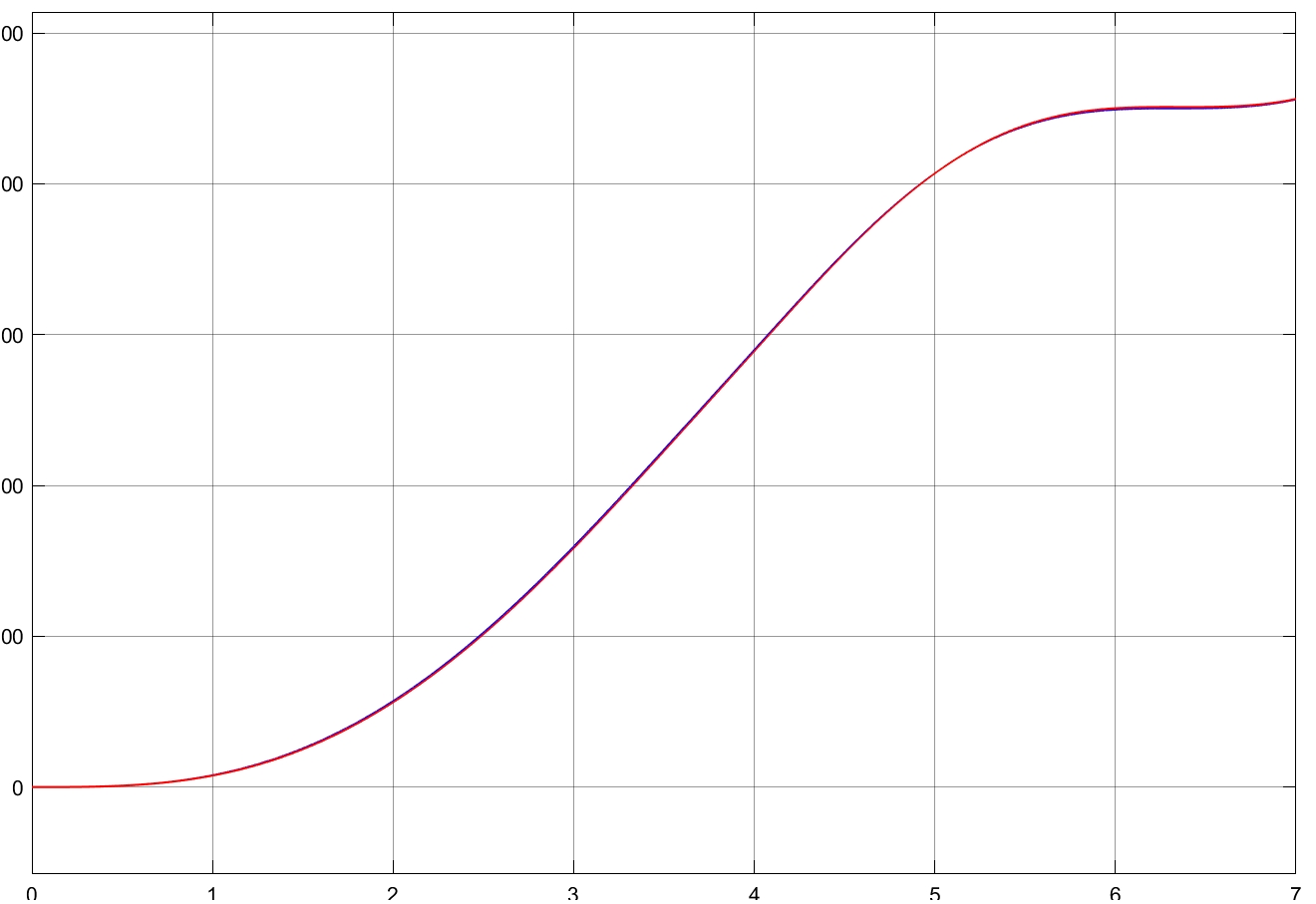
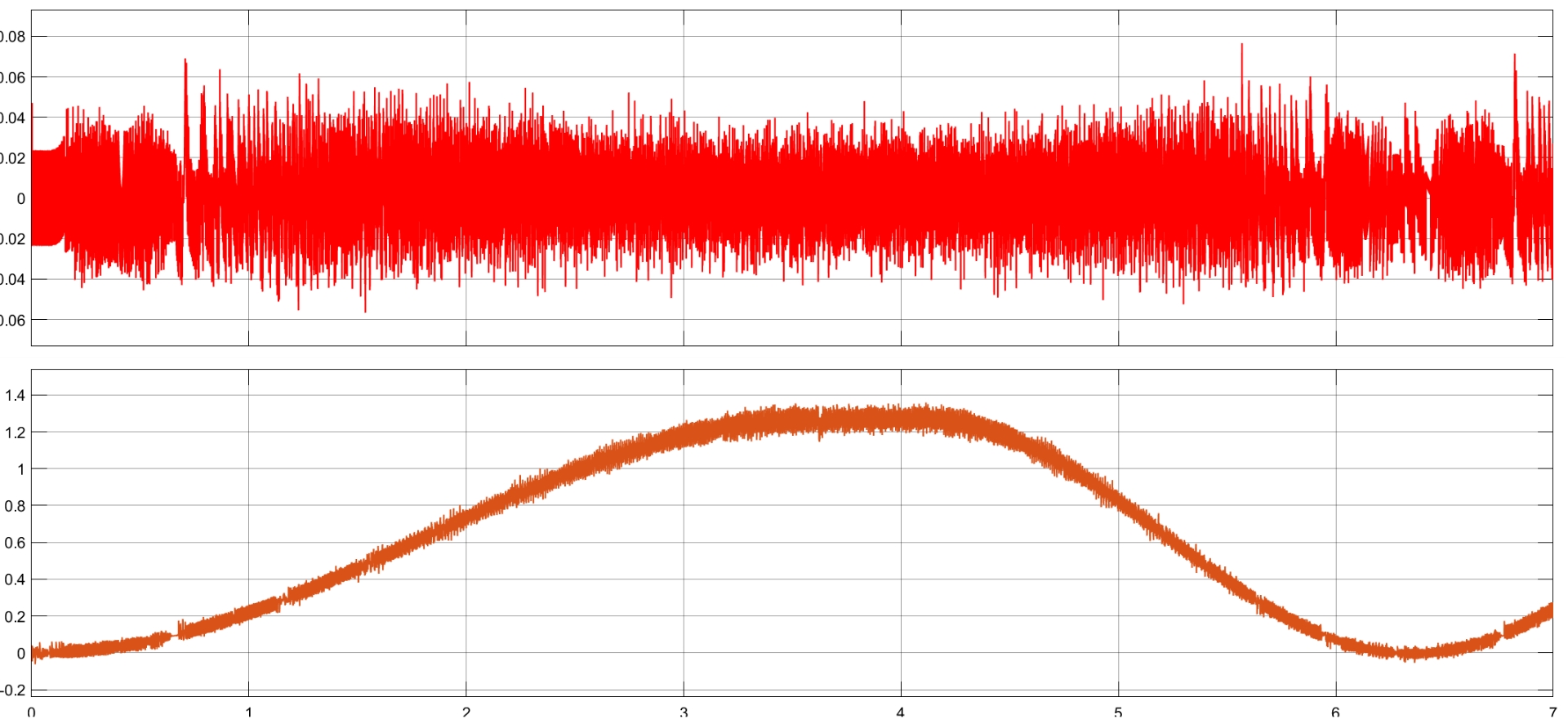
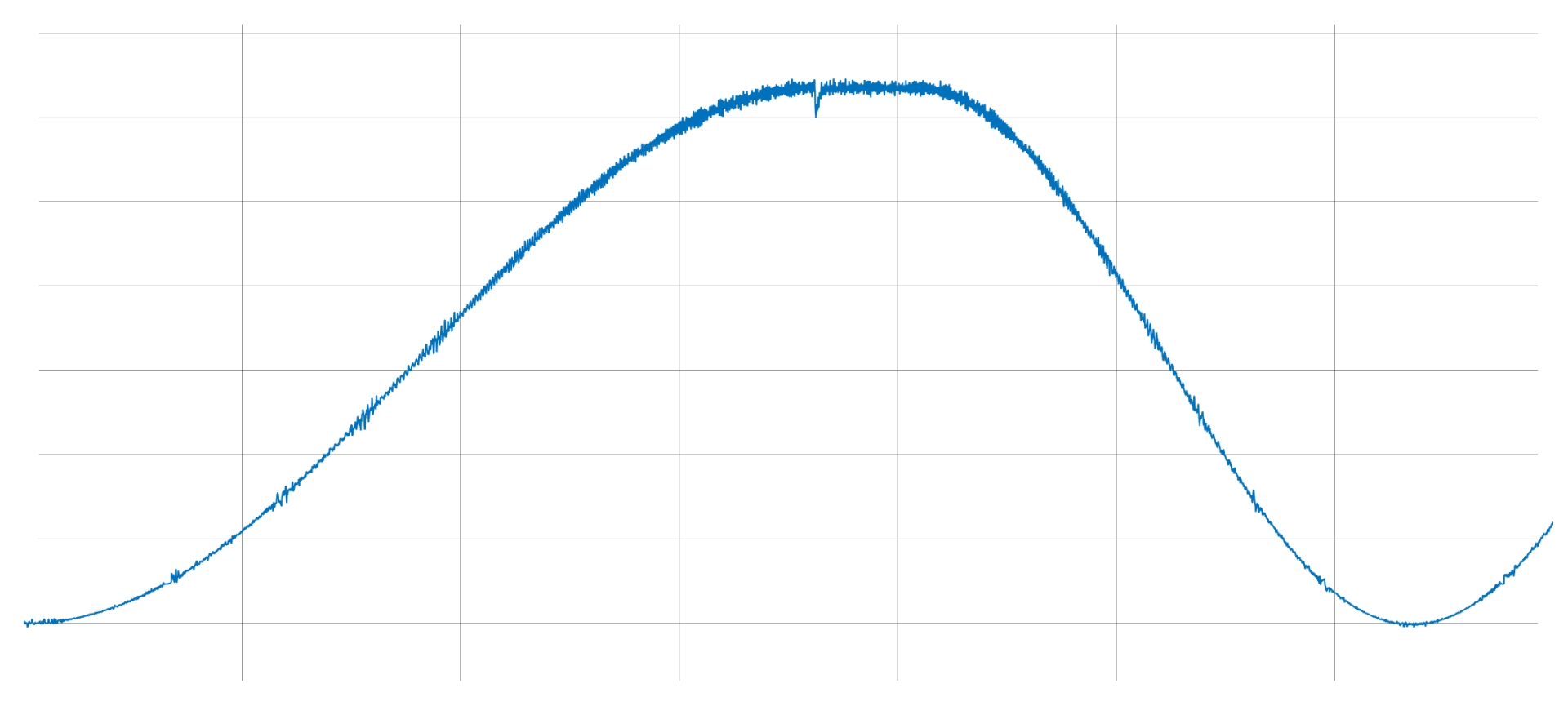
仿真结果(配图:阶跃响应曲线)显示,系统在0.5秒内能跟踪到90度位置阶跃变化,超调量控制在3%以内。但有趣的是,当把负载惯量增加50%后,原有参数下的响应出现低频震荡,这说明微分项的增益需要根据负载特性动态调整。
代码里有个容易踩坑的地方是采样时间的一致性。曾经因为位置环和速度环用了不同的采样周期(10ms vs 1ms),导致系统出现难以解释的抖动。后来统一用定时中断触发所有控制循环才解决。这告诉我们:看似简单的时序问题,在实际系统中可能比算法本身还关键。
整个仿真最让人满意的不是跟踪精度,而是突加负载时的恢复能力。当用下面代码模拟1N·m的阶跃扰动时:
python
def load_torque(t):
if 2.0 < t < 2.5:
return 1.0
return 0.0系统能在100ms内恢复到目标位置,这说明电流环的响应速度足够快。不过这也暴露出前馈补偿的不足------下次改进打算加入加速度前馈来进一步提升动态性能。
这种三环结构就像俄罗斯套娃,每一层都得严丝合缝。调参过程虽然痛苦,但看到电机乖乖跟着指令走的时候,还是挺有成就感的。下次可以试试用模糊PID替代传统PID,估计又得掉不少头发。