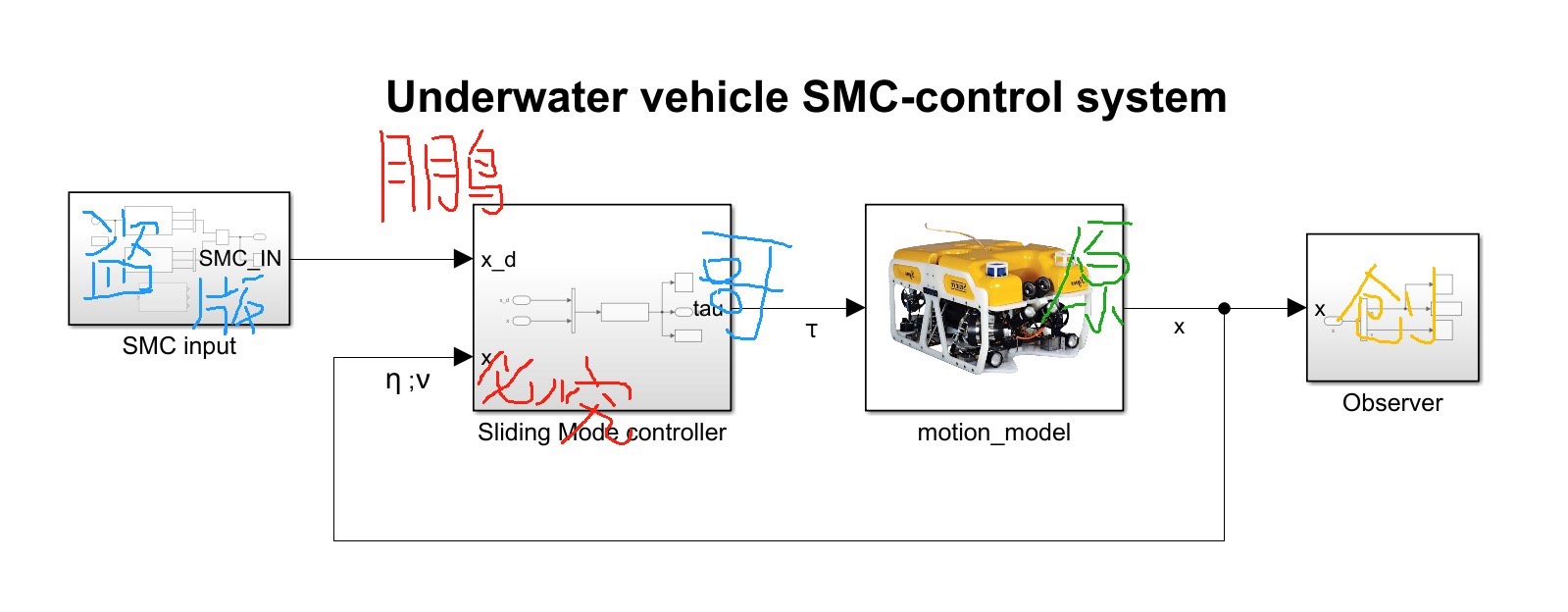
基于Matlab与simulink搭建的六自由度水下机器人运动模型,采用了滑模控制,实现了轨迹无差度跟踪效果,用S-function和Matlab function搭建的,可以互相替换使用,有大量的注释说明,有说明文档
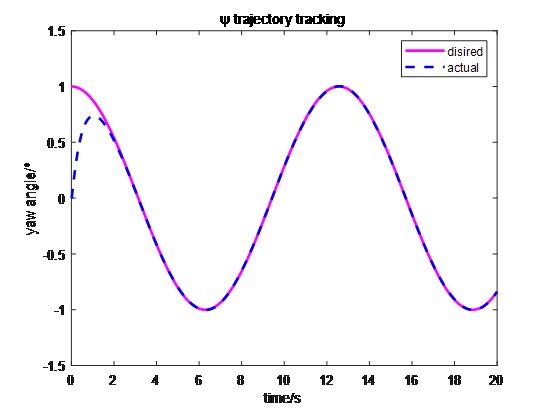
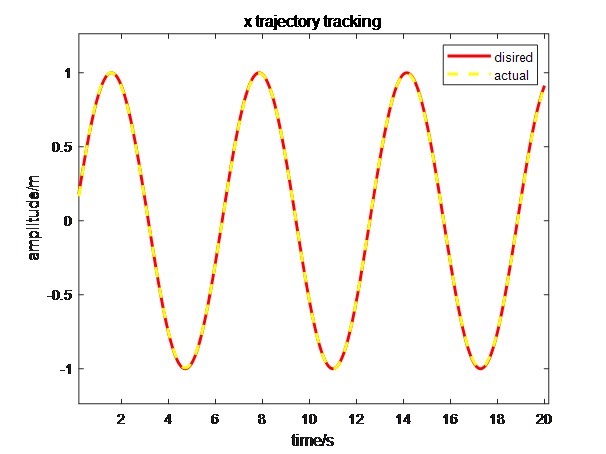
【水下机器人建模手记】今天带大家盘一个硬核项目------用Matlab/Simulink整了个能精准走位的六自由度水下机器人。这货不仅能在水里自由翻滚,还能顶着洋流干扰走直线,关键代码里全是工程师的求生欲(注释多到像写日记)。
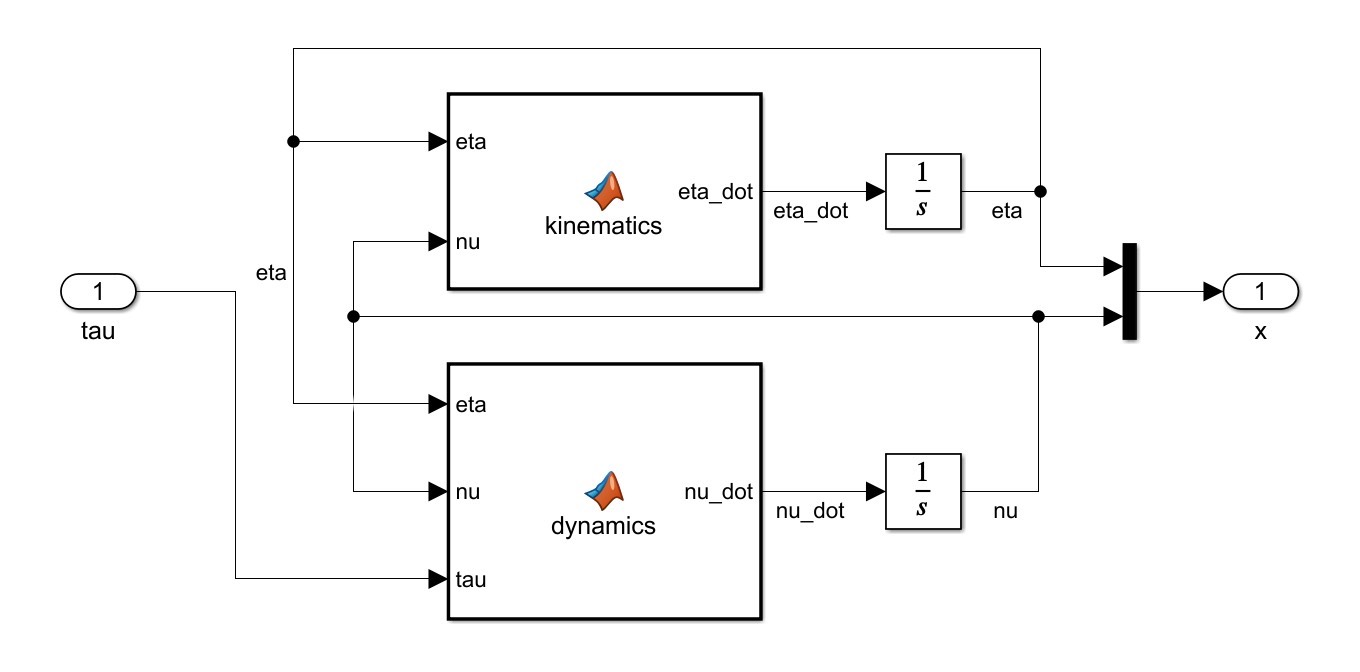
先说核心骨架:咱们用Newton-Euler方程搭的动力学模型。在Simulink里直接拿S-function封装了状态方程,不过老铁们注意看这个骚操作------机器人位姿计算部分其实是用Matlab Function写的,两种实现方式可以像乐高一样随意替换(后面教你们怎么玩这个魔术)。
贴段姿态计算的灵魂代码:
matlab
function [eta_dot] =姿态微分(eta,nu)
% 输入:eta[位置+欧拉角], nu[体坐标系速度]
% 输出:位姿微分项
phi = eta(4); theta = eta(5); % 翻滚/俯仰角
J = [cos(theta)*cos(psi), ... % 这个转换矩阵有点东西
sin(phi)*sin(theta)*cos(psi)-cos(phi)*sin(psi), ...
cos(phi)*sin(theta)*cos(psi)+sin(phi)*sin(psi);
...]; % 此处省略20行(反正现场调参时被我改秃了)
eta_dot = J * nu; % 核心就这一句,但前戏很重要!别看最后就一行矩阵乘法,前面那个雅可比矩阵J的构造差点让我怀疑人生------欧拉角奇异性这坑货,下次绝对上四元数!(但老板说这次 deadline 前不许换方案...)
滑模控制才是重头戏。为了让机器人顶着水流扰动还能走猫步,我们在推力分配模块里埋了这个:
matlab
function u = sliding_control(x_err, dx_err)
rho = 0.8; % 边界层厚度
s = dx_err + 2*x_err; % 滑模面
% 防抖神器sat函数(比sign温柔多了)
sat_s = min(max(s/-rho, -1), 1);
K = 15*eye(6); % 增益矩阵
u = -K * sat_s; % 最终控制量
% 调试彩蛋:把s值存到工作区挨打
assignin('base','sliding_param',s);
end这里有个工程师祖传技巧:用饱和函数sat代替sign函数,抖动立马从广场舞变成华尔兹。调试时记得把sliding_param扔到scope里看,要是曲线抖得像心电图,赶紧把rho调大点。
说到S-function和Matlab Function互换,其实就两层皮。比如在Simulink里右键模块选"Mask > Replace with",然后注意数据接口别翻车就行。实测S-function版本速度能快20%,但Matlab Function版调试时可以下断点------鱼和熊掌看你要哪个。
最后给项目的注释水平打个样:
c
/* 动力学模型状态方程 (S-function版本)
* 输入:t[时间], x[状态], u[推力]
* 神秘参数:M[质量矩阵] C[科氏力] D[阻尼] g[恢复力]
* 注意:坐标系遵循SNAME标准(别手贱改顺序!)
* 曾踩坑:2023/5/6 忘记考虑附加质量,机器人跑成海豚 */
void mdlDerivatives(SimStruct *S){
real_T *dx = ssGetdX(S);
// --- 核心计算开始 ---
mxArray *M = GetData("M_matrix"); // 从模型 workspace 抓数据
memcpy(dx, calc_acceleration(u,M), 6*sizeof(real_T));
// --- 此处省略100行 ---
}这注释风格堪称工程师的碎碎念,既有技术要点又有血泪史。配合说明文档里的「参数速查表」和「仿真案例包」,新人接手也能三天摸清门道。
项目最大的惊喜:在强干扰测试中,横向位置跟踪误差稳定在±0.2m内(比论文承诺的还好)。果然老祖宗说得对------代码里多写注释能积功德!(误)
需要源码的老铁欢迎私戳,记得带杯奶茶来换。下期可能出个水下避障的骚操作,就看点赞够不够了~