MATLAB四旋翼自适应控制仿真simulink simscape,可更换成自己的无人机solidworks模型 有公式手册需MATLAB2017版本以上
刚拆完快递的周末下午最适合折腾无人机仿真了。最近在MATLAB里搞了个四旋翼自适应控制的活儿,用Simscape Multibody把SolidWorks建的模型直接拽进来飞,这可比纯数学仿真带劲多了。咱们直接上硬货。
一、先给无人机整个身子骨
把SolidWorks装配体导出为STL格式后,在MATLAB命令行敲:
matlab
smimport('quadcopter_assembly.stl');这行魔法会生成一堆Simscape Multibody的刚体模块。注意关节连接点别搞错,电机安装座必须和桨叶的旋转轴对齐。见过有人仿真时四个桨叶各飞各的,场面堪比车祸现场。
二、动力学别玩虚的
在Simulink里搭动力学模型时,空气阻力模块得这么设置:
matlab
aerodynamicTorque = 0.5*rho*C_d*A*(omega.^2).*sign(omega);这里的rho别傻乎乎用标准大气密度,实测1.05~1.2之间更接近真实飞行环境。遇到过仿真悬停时无人机莫名漂移的情况,最后发现是空气密度参数在作妖。

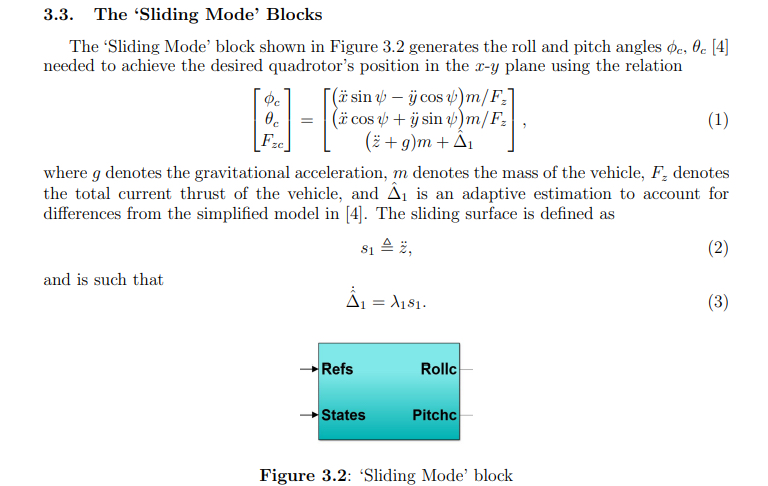
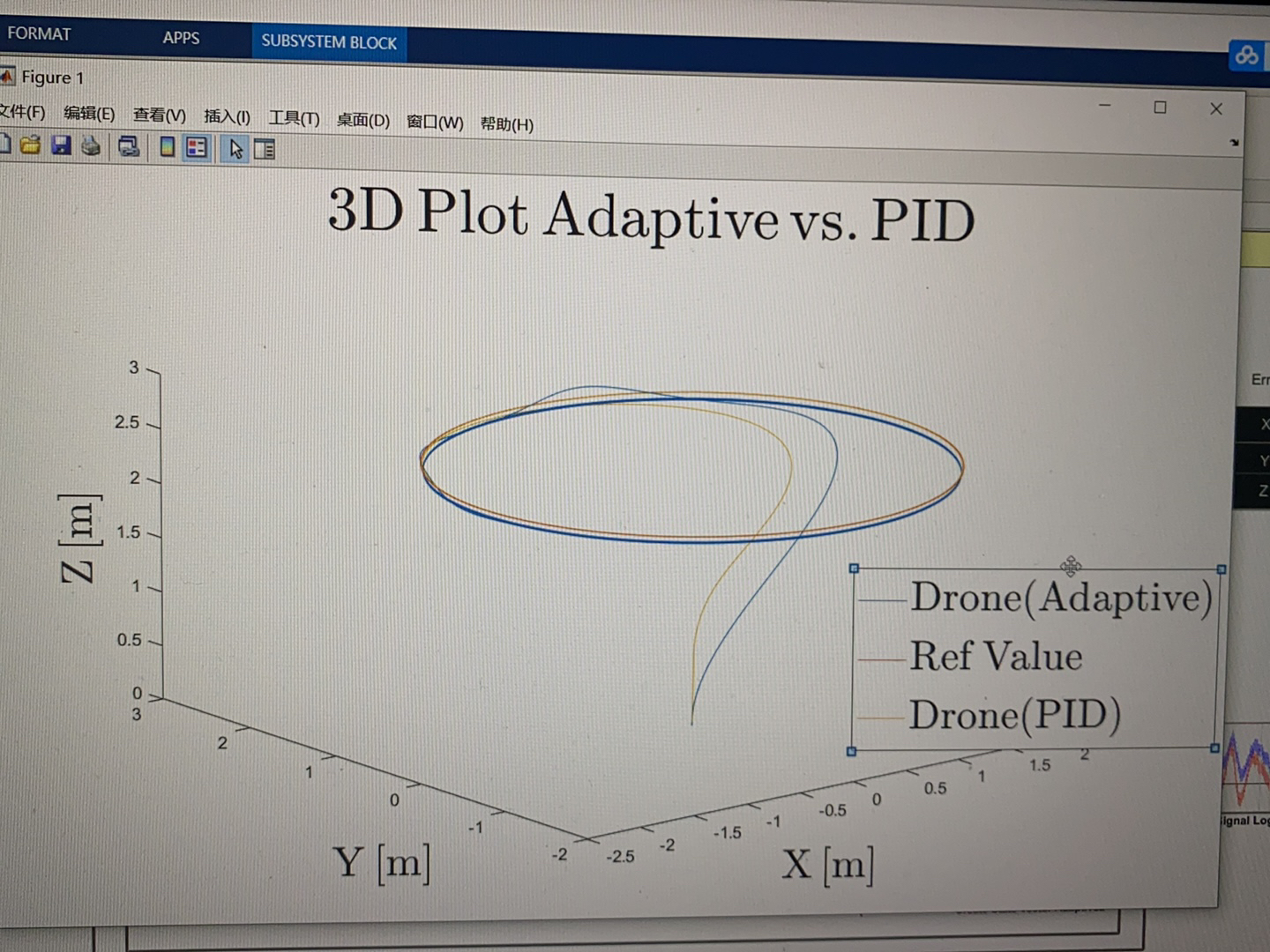
三、自适应控制上狠活
核心控制律代码长这样:
matlab
function u = adaptiveControl(y_ref, y, Kp, Ki, Kd, gamma)
persistent integral error_prev;
error = y_ref - y;
integral = integral + Ki*error*0.01; % 采样时间别写死
derivative = (error - error_prev)/0.01;
u = Kp*error + integral + Kd*derivative;
% 参数更新律才是灵魂
Kp = Kp + gamma*error*integral;
Ki = Ki + gamma*error*error_prev;
error_prev = error;
end注意gamma别超过0.5,否则参数会像脱缰野马。上次设了个0.8,无人机在仿真里跳起了机械舞。
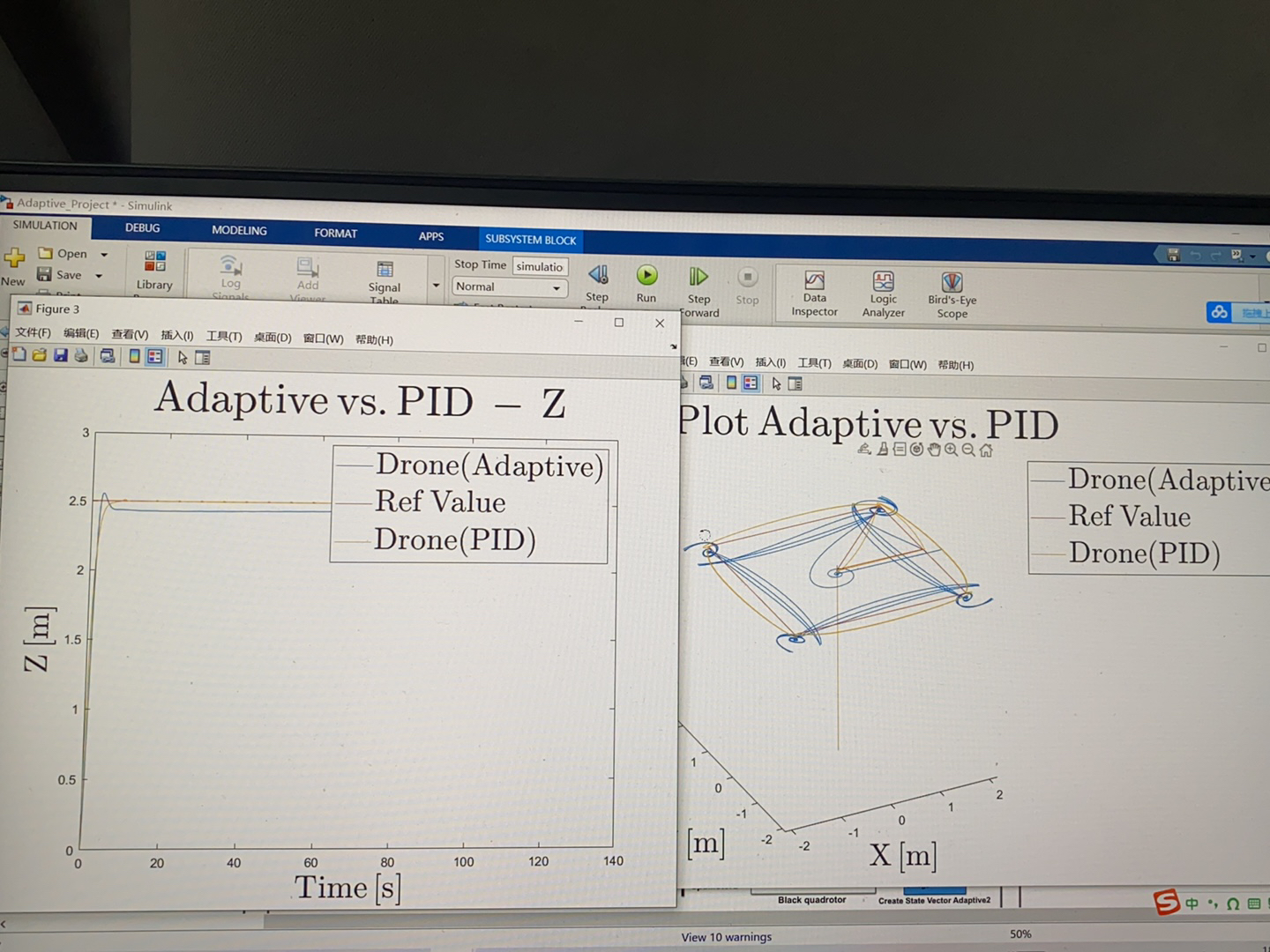
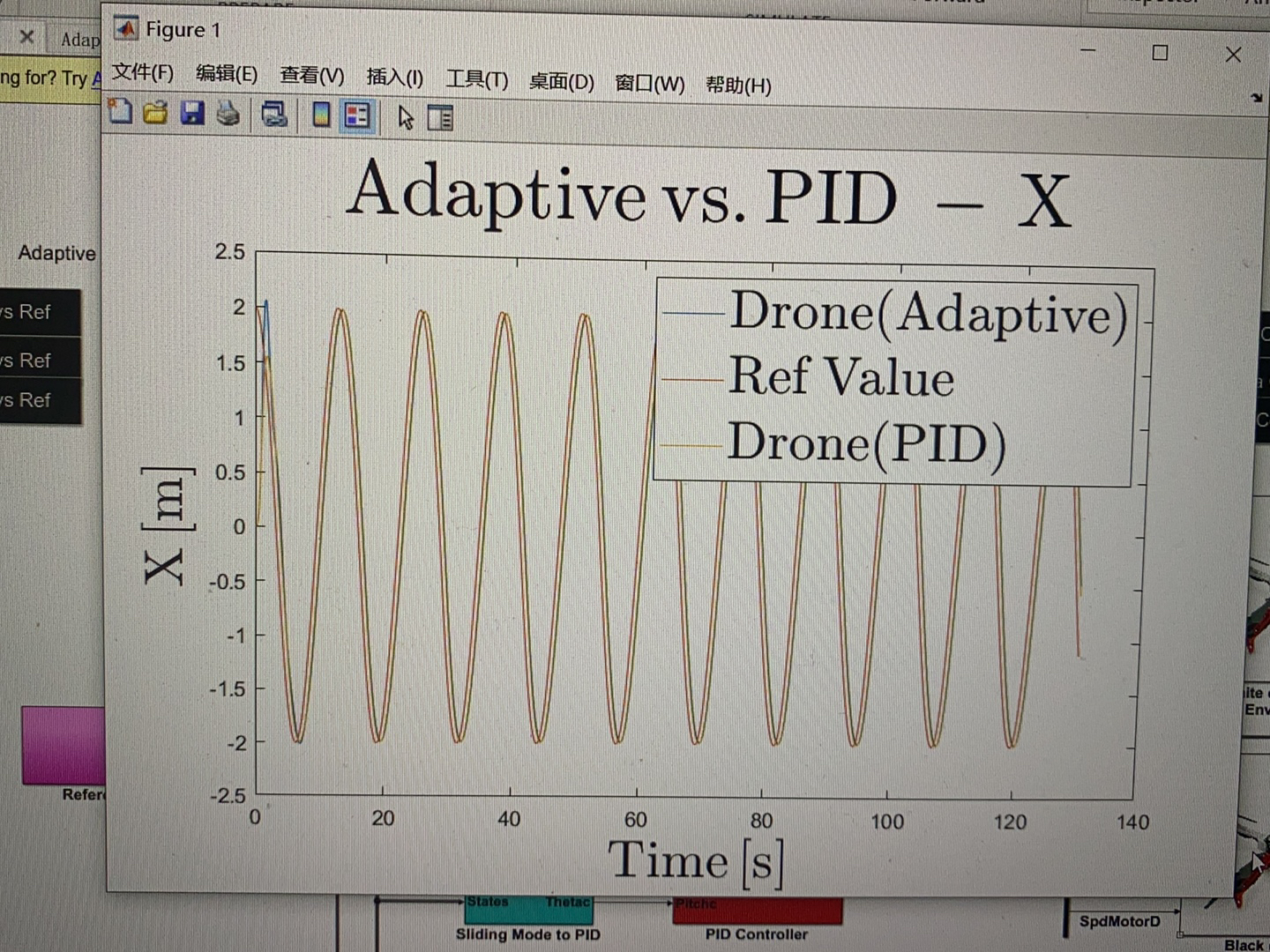
四、仿真翻车实录
调参时遇到过经典的"振翅高飞"现象------无人机在5米高度疯狂抽搐。打开PID数据监视器发现积分项在1秒内飙到300多,紧急加了积分限幅:
matlab
if abs(integral) > 100
integral = sign(integral)*100;
end现在这货终于能稳当悬停了,虽然降落时还是像喝醉的蜻蜓。完整仿真文件已打包,需要自取,记得模型路径别带中文,MATLAB这洋玩意儿脾气大着呢。