设计能够将电能转化为机械能的肌肉状软执行器,是软体机器人、触觉反馈与假肢等领域面临的共同挑战。目前,电驱介电弹性体人工肌肉被视为该领域的变革性进展,其工作机制是基于麦克斯韦应力效应:在两侧柔性电极间施加电压,弹性体薄膜厚度受压、面积扩张。其厚度变形程度主要取决于材料的相对介电常数(εr)与杨氏模量(Y)之比,即机电敏感性(εr / Y)。然而,现有介电弹性体的机电敏感性普遍不足(通常低于110 MPa⁻¹),导致在较低电场下的驱动性能遇到瓶颈。提高ε_r或降低Y的传统策略往往相互制约,并可能牺牲击穿电场、寿命等其他关键机电性能。因此,如何协同优化这些参数,成为提升介电弹性体人工肌肉性能的核心难题。鉴于此,上海交通大学朱向阳教授、谷国迎教授以及江西科技师范大学卢宝阳教授提出一种异质交联诱导相分离策略,成功设计出一类半分离双相双连续介电弹性体。该策略利用两种商业硅弹性体(Sylgard 170与Elastosil P7676)不同的交联机制,在最终形成的弹性体中构建了一个高介电相嵌入极软机械相内的互穿双连续结构。这种独特的结构使材料获得了高达360 MPa⁻¹的机电敏感性。基于此材料制备的人工肌肉,在低驱动电场下同步实现了高能量密度、高功率密度以及超长寿命。研究进一步展示了其在具有大行程的机器人手臂和无缆软体爬行机器人等多模态运动中的应用,彰显了其卓越的性能与多功能性。相关研究成果以题为"Semiseparated biphasic bicontinuous dielectric elastomer for high-performance artificial muscle"发表在最新一期《science》上。【异质交联诱导相分离策略与材料特性】研究者通过主链交联的Sylgard 170(D-Phase,高介电常数 ~3.9)
与侧链交联的Elastosil P7676(M-Phase,超低杨氏模量 ~8 kPa)
的异质交联,制备了半分离双相双连续弹性体。X射线计算机断层扫描与 原子力显微镜成像(图1B,图1C)清晰揭示了其双连续拓扑结构,区别于均相双网络弹性体。AFM纳米力学映射显示两相在德亚金-穆勒-托波罗夫模量和相位角上存在显著差异(图1D)。关键性能表征显示(图1F,图1G),SBE材料的杨氏模量、力学损耗因子、玻璃化转变温度和介电常数均介于两纯相材料之间。尤为重要的是,仅含10% D-Phase的SBE-1,其杨氏模量(~10 kPa)仅略高于纯M-Phase,但相对介电常数(3.6)比纯M-Phase高出44%,从而实现了360 MPa⁻¹的超高机电敏感性。此外,SBE-1的击穿场强提升至 >35 V μm⁻¹,高于两纯相材料,并能在无预拉伸条件下实现90%的面积应变(图1H)。循环拉伸测试表明SBE的滞后几乎可忽略,展现了优于丙烯酸基介电弹性体的弹性与响应速度潜力。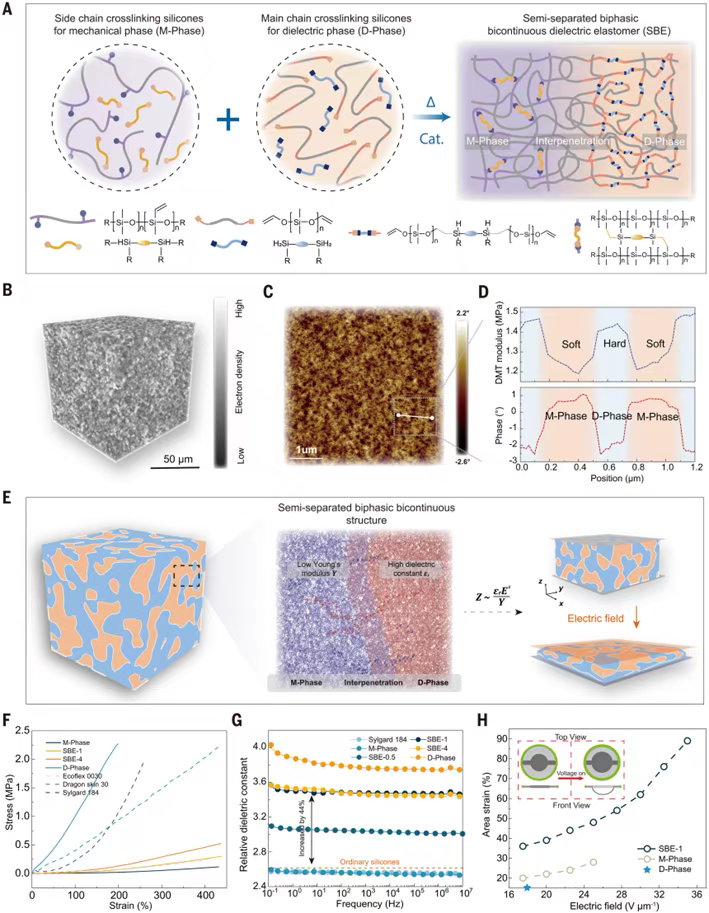
图 1. 杂交联诱导相分离策略及材料性质【高性能SBE基人工肌肉】研究者首先设计了纯剪切模式的人工肌肉单元进行性能评估。结果表明,基于纯D-Phase或M-Phase的人工肌肉因机电敏感性或击穿场强不足而性能受限。而SBE-1基人工肌肉在线性应变 >50%、应变率400% s⁻¹方面表现出色(图2B)。能量密度测试显示,在低频(<2 Hz)下,SBE-1、SBE-4和SBE-6的最大能量密度分别达到209、334和375 J kg⁻1,优于纯相材料及多数文献报道值(图2C)。通过高效的刮涂、转印、层叠/卷绕工艺(图2D),研究者制备了多层堆叠与卷绕结构的人工肌肉。性能测试表明,SBE-1基人工肌肉在优化几何参数后,响应频率最高可达1500 Hz。堆叠式人工肌肉(尺寸8 mm × 8 mm × 3 mm,重0.35 g)在>200 Hz谐振状态及35 V μm⁻¹电场下,展现出最大阻塞力密度21.76 kPa、功率密度2250 W kg⁻1(图2F)。一个4.5 mm高的堆叠肌肉能反复举起300 g负载(自重的250倍),产生4.1 mm位移(91%线性应变)(图2G);即使负载增至600 g,仍能保持60%线性应变(图2H)。其综合性能在机电敏感性与功率密度方面超越了天然肌肉及多数已报道的介电弹性体人工肌肉(图2I)。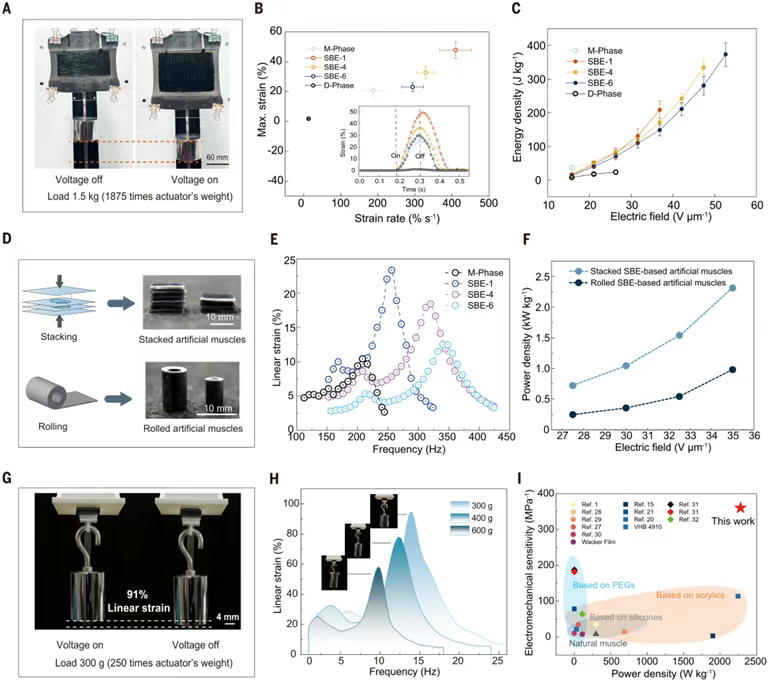
图 2. 基于 SBE 的人工肌肉表现【长期稳定性与鲁棒性】SBE材料展现出卓越的机械鲁棒性。得益于其相分离微结构,SBE-1的疲劳阈值达到78 J m⁻²,是纯M-Phase(21 J m⁻²)的三倍以上(图3B)。在带有针孔裂纹的样品上进行5万次50%应变循环后,应力损失小于1%(图3C)。此外,涂覆碳纳米管电极的SBE人工肌肉具备"自清除"能力,能在初始施加阶梯电压时烧断内部低击穿路径的缺陷,形成绝缘区,从而稳定性能(图3D,图3E)。得益于这些特性,SBE人工肌肉在35 V μm⁻¹下,于1 Hz频率下可稳定工作超过37.5万次循环,在260 Hz下更可超过1亿次循环,寿命远超基于纯M-Phase或其它商业硅胶的驱动器(图3F)。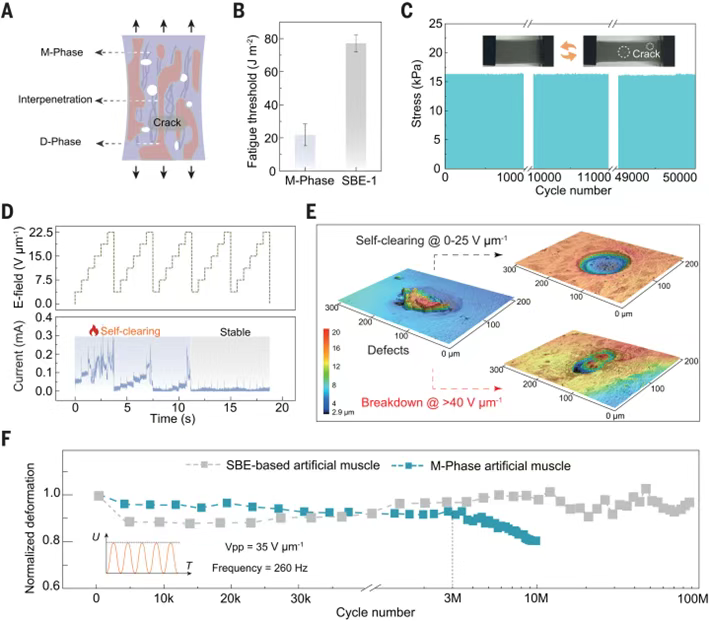
图 3. 基于 SBE 的人工肌肉的长期稳定性和稳健性【应用】研究者开发了仿人机器人手臂,由四个纯剪切SBE人工肌肉构成拮抗组(图4A)。通过交替驱动"二头肌"与"三头肌",实现了最大119.3°的关节角位移(图4B)。该手臂能输出最大0.24 N·m扭矩,在负载80 g时仍可实现60.4°角位移(图4C),并成功进行了超过4万次稳定循环测试。基于SBE人工肌肉的振动特性,研究者设计了一款软体爬行机器人(图4D)。机器人通过各向异性的足部结构将振动转化为快速爬行,在300 Hz频率和30 V μm⁻¹场强下,最高速度达到22 BL s⁻1(每秒22个体长)(图4E)。通过调节前后肌肉的驱动相位差,还能实现后退运动。其柔软性使其能够穿越弯管并在崎岖的胃模型内导航(图4F)。更重要的是,SBE所需的低驱动电场使无缆应用成为可能。研究者集成高压升压模块、微控制器、红外接收器与电池,制作了总重29.43 g的无缆机器人(图4G),仅由6个总重约1.08 g的人工肌肉驱动,成功实现了爬行与转向(图4H)。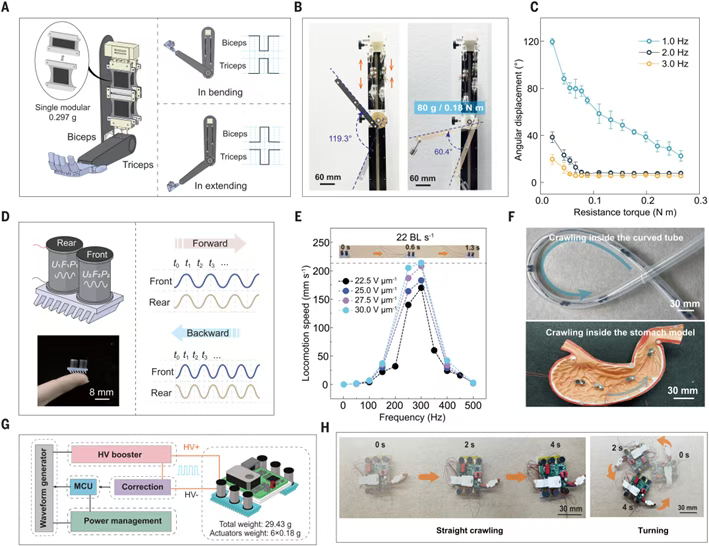
图 4. 基于 SBE 的人工肌肉应用【总结与展望】本研究通过异质交联诱导相分离策略,成功创制了一类具有高机电敏感性的半分离双相双连续介电弹性体。基于此材料的人工肌肉同步实现了高能量密度、高功率密度、快响应速度、高机电效率与超长寿命的协同提升。研究展示的大行程机器人手臂与多模态无缆软体爬行机器人,充分验证了该材料在复杂应用场景下的高性能与适应能力。这些进展为下一代要求更高输出性能、超长寿命与优异完整性的电驱动软体机器人奠定了坚实的材料与技术基础,展现出广阔的应用前景。