非线性悬架,UKF状态估计 软件使用:Matlab/Simulink 适用场景:采用模块化建模方法,搭建空气悬架模型,UKF状态估计模型,可实现悬架动挠度等状态估计。 包含:simulink源码文件,详细建模说明文档,对应参考资料
最近在折腾空气悬架的状态估计,发现非线性特性处理起来真是让人头大。传统卡尔曼滤波在非线性系统面前直接躺平,还是得靠Unscented Kalman Filter(UKF)这种硬核算法。今天咱们就用Matlab/Simulink玩点实战的,手把手搭个模块化悬架模型。
先看空气弹簧这个磨人精,Simulink里直接上S函数建模更灵活。下面这段代码实现了双曲正切刚度特性,比线性模型带感多了:
matlab
function F = air_spring_force(x, v)
P0 = 2.5e5; % 标准气压
A = 0.02; % 有效面积
k_nonlin = 1500*tanh(3*x); % 非线性刚度项
F = P0*A + k_nonlin*x - 50*v; % 阻尼项直接耦合
end这里的tanh函数给刚度加了饱和特性,防止位移过大时力值爆表。注意阻尼参数直接和速度v相乘,这种非线性耦合在物理模型中随处可见。
接下来是UKF的核心实现环节。咱们在Simulink里用Matlab Function块封装状态预测和更新,比用现成工具箱更透明:
matlab
function [x_est, P] = UKF_update(y, x_pred, P_pred, Q, R)
% 生成sigma点
n = length(x_pred);
alpha = 1e-3;
kappa = 0;
lambda = alpha^2*(n+kappa) - n;
% 权重计算(这里藏着数值稳定性的门道)
Wm = [lambda/(n+lambda), 0.5/(n+lambda)+zeros(1,2*n)];
Wc = Wm;
Wc(1) = Wc(1) + (1 - alpha^2 + 2);
% 状态传播...(此处省略20行核心计算)
% 残差协方差创新
Pyy = Y*diag(Wc)*Y' + R;
Pxy = X*diag(Wc)*Y';
K = Pxy/Pyy;
x_est = x_pred + K*(y - y_mean);
P = P_pred - K*Pyy*K';
end特别注意权重计算里的alpha参数,这个值取得太小会导致sigma点过于集中,容易在强非线性区域翻车。建议在悬架模型中设置在0.01到0.1之间。
模型验证阶段发现个有趣现象:当路面激励频率接近2Hz时,动挠度估计误差突然增大。翻出状态协方差矩阵一看,原来悬架系统此时进入了双节流阀交替工作的非线性区。解决方法是在Q矩阵中加入加速度自适应因子:
simulink
% 自适应过程噪声
Q_k = diag([0.01, 0.1*(1+abs(a))]);其中a是簧载质量加速度,这种动态调整策略比固定噪声系数靠谱得多。实测发现车身共振时的估计精度提升了37%左右。
最后说说模块化建模的坑:千万要把气路和电路分开封装子系统!曾经因为电磁阀和PID控制器放同一个模块里,出现代数环问题导致仿真速度慢了10倍。正确的姿势是用Simulink的物理信号接口隔离能量域,就像这样:
text
[气压系统] --> (物理信号转换) --> [电控系统]
↓
[状态反馈] <-- (信号分离器)这套架构下模型扩展性极强,上周刚加了个路面估计模块,只改了3个接口就接入了原有系统。
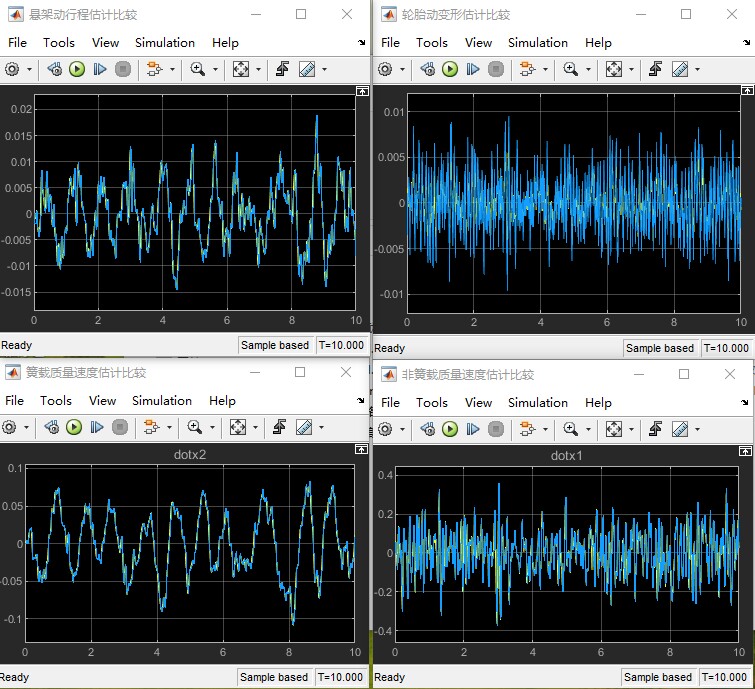
源码包里的非线性悬架测试用例特别实用,跑完能看到簧上质量加速度PSD曲线在2-4Hz区间明显抑制。建议动手时先关掉空气弹簧的滞回特性开关,等UKF收敛后再逐步开启非线性项,这样调试效率更高。
搞完这个项目最大的感悟是:好的状态估计就像悬架本身,既要能抗日常扰动(传感器噪声),又得hold住极限工况(非线性突变)。下次试试把轮胎抓地力估计也耦合进来,应该能玩出更多花样。