工业机器人实验机器人画圆轨迹
实验七机器人画圆轨迹
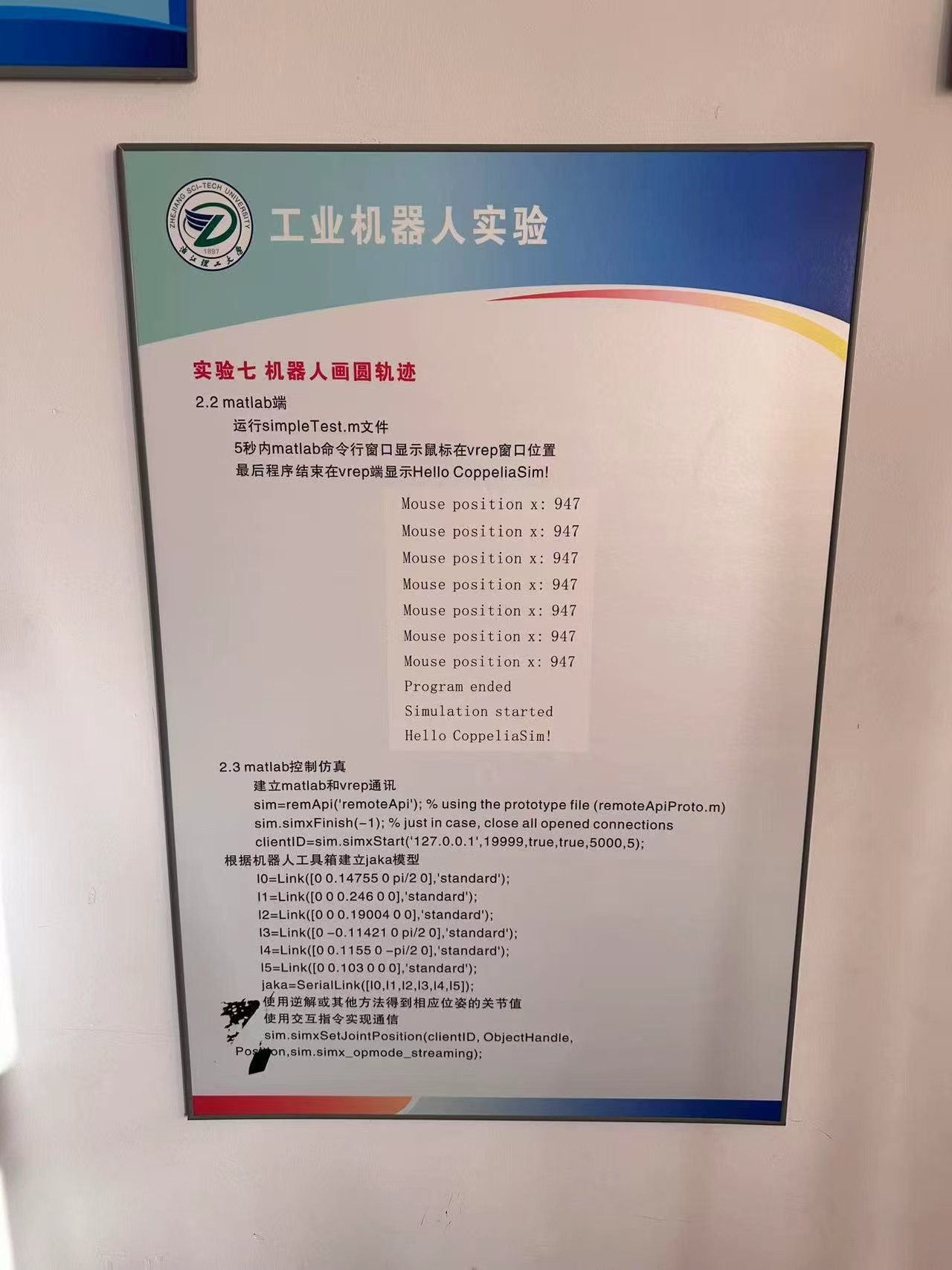
2.2 matlab端
运行simpleTest.m文件
5秒内matlab命令行窗口显示鼠标在vrep窗口位置
最后程序结束在vrep端显示HelloCoppeliaSim!
Mouse position x: 947
Mouse position x:947
Mouse position x: 947
Mouse position x:947
Mouse position x:947
Mouse position x:947
Mouse position x:947
Progran ended
Simulation started
Hello CoppeliaSim!
2.3 matlab控制仿真
建立matlab和vrep通讯
sim=remApi('remoteApil):using theprototype file(remoteApiProto.m)
simsiinis:jusnlllon
clientdsim.simtart(127.0.0.1,199.rue.true500
根据机器人工具箱建立jaka模型
IO=Link(00.147550pi/20.'standard'):
I1=Link(o00.24600,'standard'):
I2=Link(000.1900400.'standard'):
13=Link(0-0.114210pi/20.standard):
14=Link(00.11550-p/20.standard):
I5=Link(00.103000.'standard):
j
使用逆解或其他方法得到相应位姿的关节值
使用交互指令实现通信
sim.simxointosion(cientdObjecande
on,sim.simx_opmode_streaming:
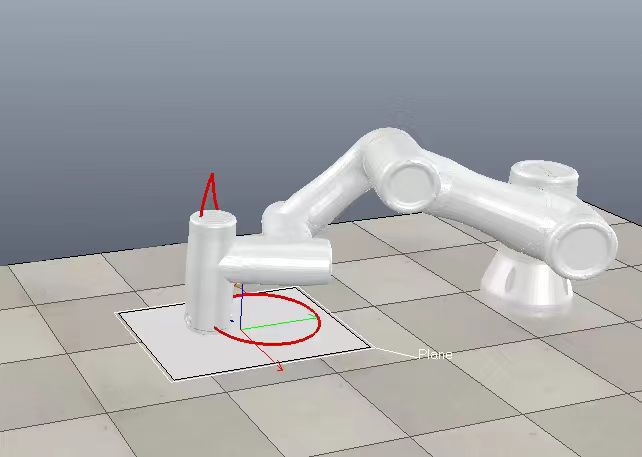
完成效果如下:
 技术/代码交流邮箱/企鹅(欢迎交流、讨论、私信):3531225003@qq.com
技术/代码交流邮箱/企鹅(欢迎交流、讨论、私信):3531225003@qq.com