openfast与simlink联合仿真模型,风电机组独立变桨控制与统一变桨控制。 独立变桨控制。 OpenFast联合仿真。 电子资料,联系默认同意。
在风电机组的控制策略中,变桨控制一直是关键部分,其中独立变桨控制和统一变桨控制是两种常见且各有特点的方式。今天咱们就结合OpenFast与Simlink的联合仿真模型,来深入聊一聊这两种控制策略。
统一变桨控制
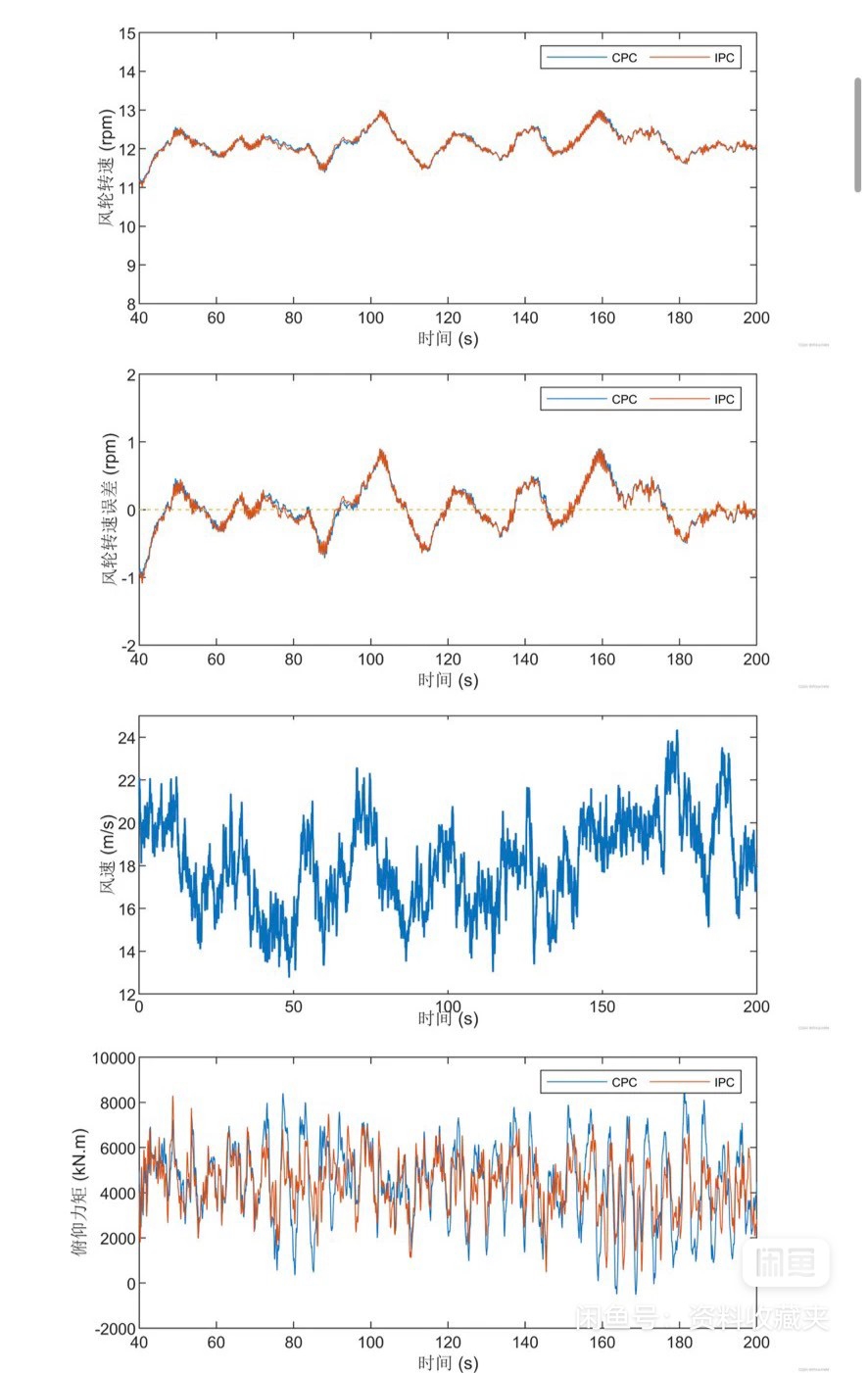
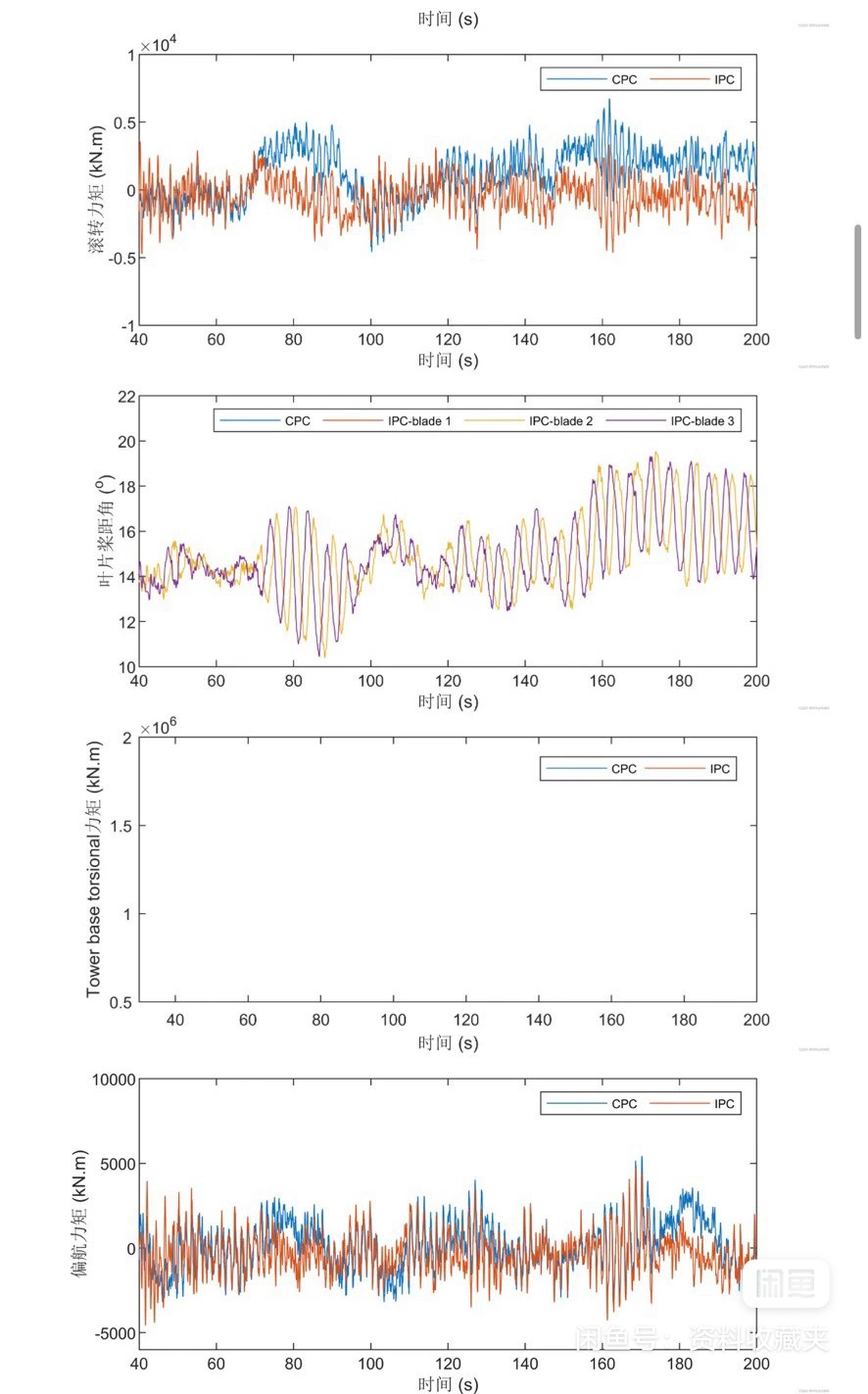
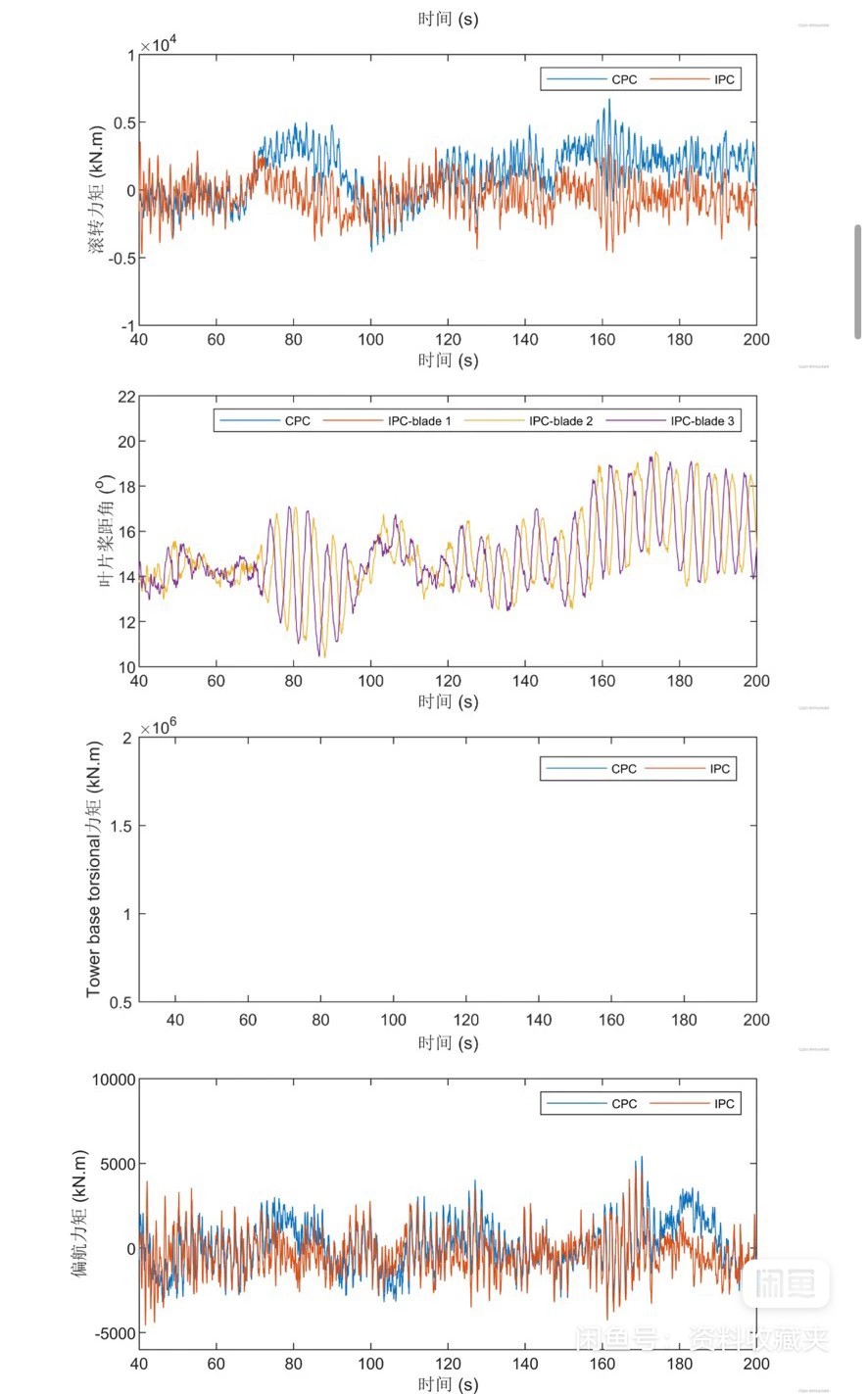
统一变桨控制相对简单直接,就是对风电机组的各个叶片采用相同的桨距角调整策略。这种方式的好处是易于实现,在风速较为稳定、风向变化不大的情况下,能有效维持风电机组的功率输出稳定。
独立变桨控制
独立变桨控制则是针对每个叶片单独进行桨距角的调节。它能更好地应对复杂的风况,比如风切变和湍流等情况。通过独立控制每个叶片的桨距角,可以更精确地平衡叶片所受的载荷,减少机组的疲劳损伤,延长风电机组的使用寿命。
OpenFast联合仿真
OpenFast是一款强大的风电机组动力学模拟软件,而Simlink在控制系统设计与仿真方面有独特优势。将两者结合进行联合仿真,就能实现对风电机组从机械动力学到控制系统的全面模拟。
联合仿真实现
以下是一段简单的Matlab代码,用于在Simlink中搭建与OpenFast联合仿真的接口框架(此处代码为示意简化版,实际应用会复杂得多):
matlab
% 初始化与OpenFast的连接参数
openfast_path = 'C:\OpenFast\'; % OpenFast安装路径
model_name = 'wind_turbine_model'; % OpenFast模型名称
% 加载OpenFast模型
system([openfast_path 'openfast.exe ' model_name '.fst']);
% 在Simlink中创建相关模块连接到OpenFast输出数据
% 这里假设OpenFast输出风速、桨距角等数据
% 在Simlink中创建相应的输入模块连接到这些输出数据在这段代码中,首先定义了OpenFast的安装路径和要加载的模型名称,然后通过system函数调用OpenFast来运行模型。之后就是在Simlink中创建相应的模块,用于接收OpenFast输出的数据,以便在Simlink环境中进行后续的控制策略设计与分析。
独立变桨控制在联合仿真中的实现
对于独立变桨控制,我们在Simlink中可以基于OpenFast输出的每个叶片的实时数据,比如叶片的受力、转速等,分别计算每个叶片所需的桨距角。
matlab
% 获取OpenFast输出的叶片数据
blade1_force = openfast_output(:,1);
blade2_force = openfast_output(:,2);
blade3_force = openfast_output(:,3);
% 根据叶片受力计算独立变桨控制的桨距角
pitch_angle1 = calculate_pitch_angle(blade1_force);
pitch_angle2 = calculate_pitch_angle(blade2_force);
pitch_angle3 = calculate_pitch_angle(blade3_force);
% 函数示例:计算桨距角
function pitch_angle = calculate_pitch_angle(force)
% 简单的线性关系示例,实际需更复杂算法
pitch_angle = 0.1 * force + 5;
end上述代码展示了如何从OpenFast获取每个叶片的受力数据,并根据这些数据计算独立变桨控制所需的桨距角。这里的calculatepitchangle函数只是一个简单示例,实际应用中会基于更复杂的力学模型和控制算法来计算桨距角,以实现最优的功率捕获和载荷平衡。
通过OpenFast与Simlink的联合仿真,我们能更深入地研究风电机组的独立变桨控制和统一变桨控制,为实际风电场的运行和优化提供有力支持。如果大家对相关电子资料感兴趣,联系我就默认同意分享啦,咱们一起在风电机组控制的技术海洋里继续探索。