目录
- 一、什么是减速机
- 二、减速机的种类
-
- [1. 谐波减速器](#1. 谐波减速器)
- [2. 摆线针轮减速机](#2. 摆线针轮减速机)
- [3. 行星减速器](#3. 行星减速器)
- [4. 蜗轮蜗杆减速机](#4. 蜗轮蜗杆减速机)
- 三、减速机的选型
-
- [1. 确定负载所需转速与扭矩](#1. 确定负载所需转速与扭矩)
- [2. 确定减速机输入轴转速与扭矩](#2. 确定减速机输入轴转速与扭矩)
- [3. 确定减速比](#3. 确定减速比)
- [4. 确定减速机型号](#4. 确定减速机型号)
- [5. 校核减速额定输出扭矩](#5. 校核减速额定输出扭矩)
- [6. 校核减速机与电机安装尺寸](#6. 校核减速机与电机安装尺寸)
本文介绍了减速机的特点及其种类,并对其选型步骤进行了简要说明。
一、什么是减速机
减速机是一种独立的传动装置,功能是将原动机的高速低扭矩动力转化成低速高扭矩动力 ,同时还可以实现运动方向的改变等功能。
减速机的作用:
- 减速增扭:原动机的输出转速一般很高,但是扭矩较小,一般无法直接驱动负载,减速机降低输出转速的同时,可以按比例放大输出扭矩。
- 匹配转速与负载要求 :不同设备的执行机构需要特定的转速,比如输送带、机械手关节需要的转动速度不是很高,这些转速远低于电机的额定转速,减速机可以精准匹配传动比,让原动机的转速适配执行机构的工作转速,可以避免设备运行速度过快或动力不足。
- 降低伺服电机系统的惯量比:当选择的伺服电机惯量比很大时,需要加合适传动比的减速机来降低惯量比。
二、减速机的种类
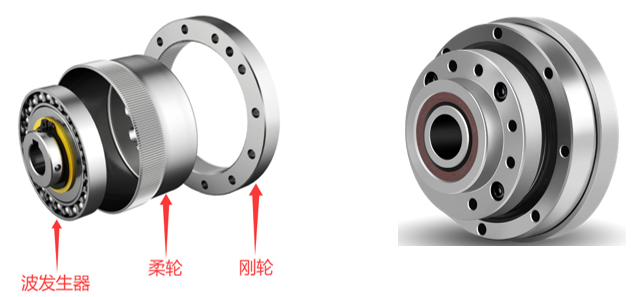
1. 谐波减速器
结构组成 :波发生器 (输入)、柔轮 (输出)、刚轮 (固定齿圈),其中,波发生器为椭圆形凸轮,负责产生周期性形变。柔轮为薄壁弹性圆筒,作为外齿圈,产生可控的弹性形变。刚轮为固定的内齿圈比柔轮多2-4个齿,
工作原理 :当波发生器旋转时,柔轮的长轴和短轴位置不断变化,波发生器每旋转一周,柔轮相对于刚轮移动两个齿,柔轮旋转一周时,波发生器已经旋转很多圈,行程高减速比。
传动比计算 :谐波传动比=输出端齿数(柔轮或刚轮)/刚轮和柔轮的齿数差 ,一般柔轮输出常用传动比为30.50.80.100.120.160。刚轮输出传动比为31.51.81.101.121.161。
优点是精度高、承载力高、与普通减速机相比,使用的材料更少,体积重量减少约三分之一。
主要用于机器人等需要精密制造或操作的领域。
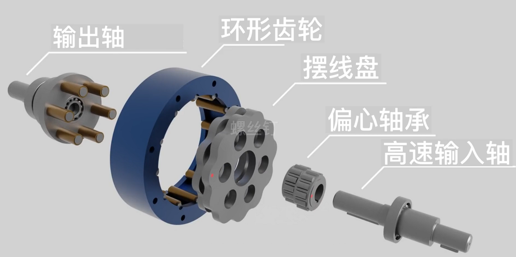
2. 摆线针轮减速机
结构组成 :主要由摆线碟、偏心轴、外壳组成,偏心轴连接输入轴,采用双偏心结构,呈180°对称。摆线轮外齿廓为外摆线的等距曲线。
工作原理 :电机带动输入轴旋转,输入轴带动偏心轴旋转,偏心轴带动摆线碟做偏心运动,同时摆线碟产生反向旋转,通过销轴将摆线轮的复合运动转化成输出轴的匀速旋转
传动比计算
轴旋转时:减速比=-Zc/(Zp-Zc) ,符号代表反转,Zp为固定外壳的内齿数,Zc为摆线轮的齿数
摆线针轮减速机精度可达1分以内
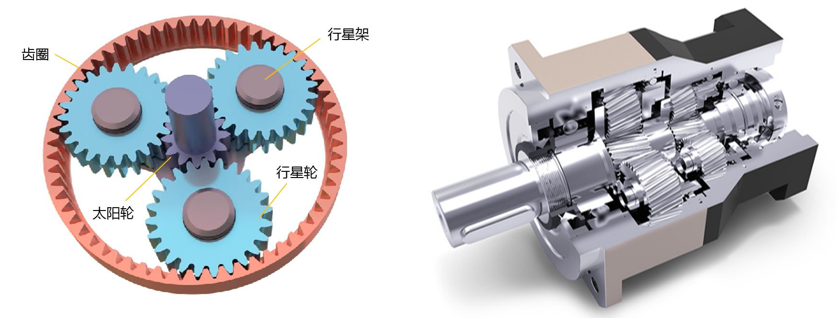
3. 行星减速器
结构组成 :太阳轮、行星轮、内齿圈、行星架。
工作原理 :太阳轮连接输入轴,行星轮围绕太阳轮公转,同时自转,将动力传递至行星架,内齿圈与行星轮啮合,行星架为输出端,将输入轴的高速低扭矩动力转化为低速高扭矩的动力,实现减速增扭。
优点 :精度高、扭矩密度高、传动效率高、减速比范围宽,多与伺服电机和步进电机配合使用。
减速比计算 :
内圈齿数=太阳轮齿数+2×行星轮齿数
(1)内齿圈固定,太阳轮输入,行星架输出,减速比=(Z太阳+Z行星)/Z太阳,运动关系为太阳轮旋转驱动行星轮公转+自转,行星架跟随行星轮公转输出动力,最常用;
(2)太阳轮固定,内齿圈输入,行星架输出,减速比=Z内齿/(Z太阳+Z内齿),运动关系为内齿圈旋转,带动行星轮自转+公转,带动行星架输出,中速比场景;
(3)行星架固定,太阳轮输入,内齿圈输出,减速比=-Z内齿/Z太阳,运动关系为太阳轮输入,行星架固定,行星轮仅自转,内齿圈反向旋转,输出动力,用于增速/反转的场景。
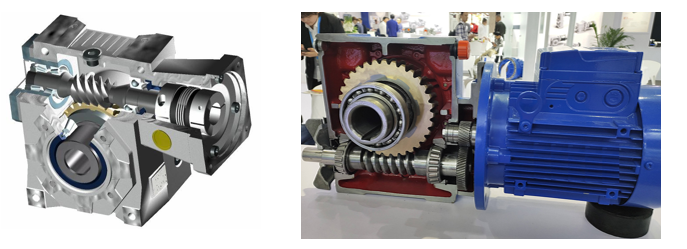
4. 蜗轮蜗杆减速机
结构组成 :蜗杆(输入)和蜗轮(输出),蜗杆传递动力,通过螺旋齿驱动涡轮旋转,实现减速增扭,输出动力。
工作原理 :蜗杆旋转时,螺旋齿推动涡轮绕自身轴线旋转,类似丝杠传动。
减速比=Z涡轮/Z蜗杆
蜗轮蜗杆传动具有自锁功能,即涡轮旋转不能驱动蜗杆旋转,实现反向自锁。其体积较大,传动效率不高,精度较低,摩擦磨损较大,配合普通电机用的多。
三、减速机的选型
1. 确定负载所需转速与扭矩
这里一般要先对电机进行选型,确定电机的型号
2. 确定减速机输入轴转速与扭矩
3. 确定减速比
4. 确定减速机型号
确定减速机的型号后要验算惯量比是否合适