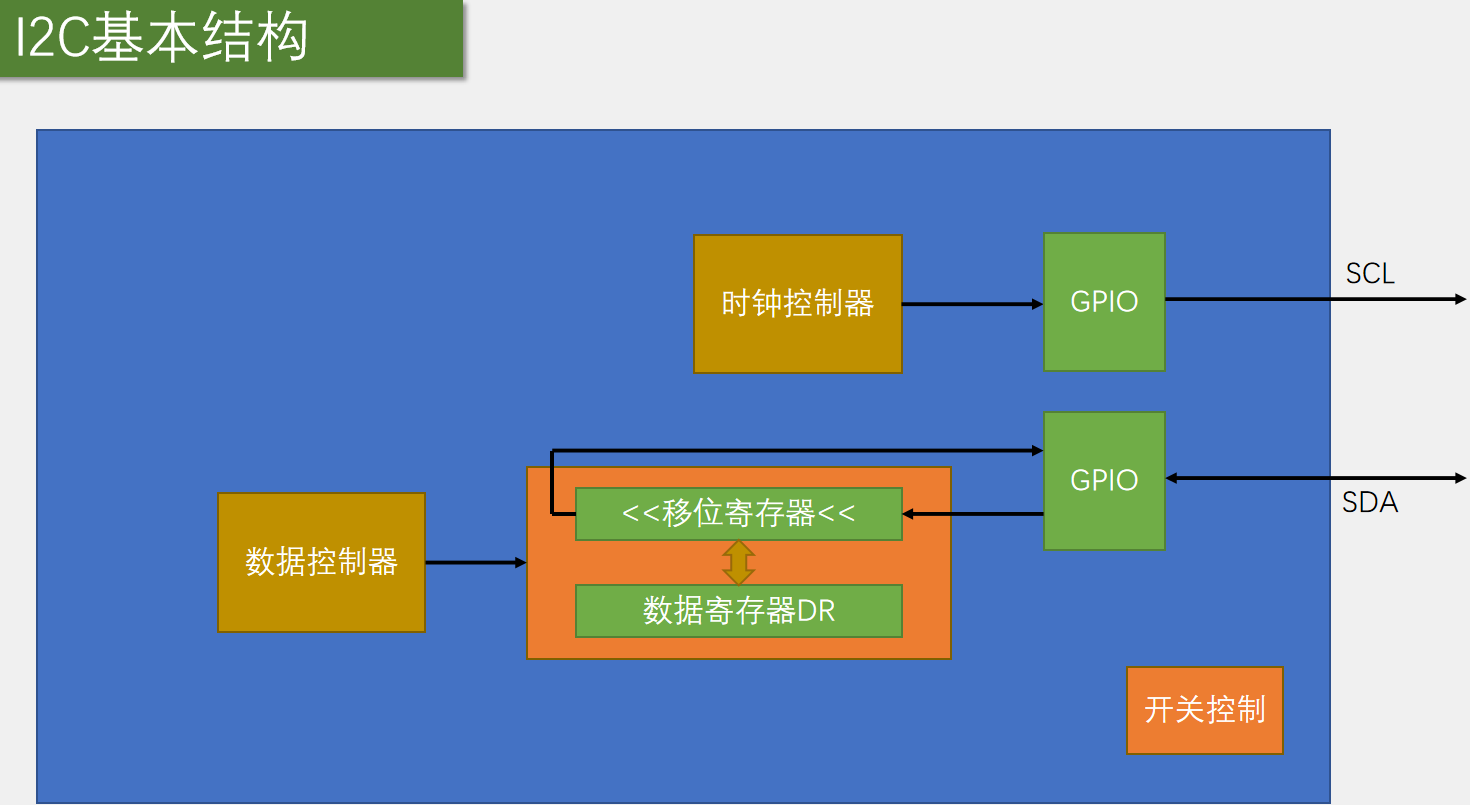
第一点很好去理解,下面的不必在乎,目前用不到,直接看最后一点,可以根据引脚的图去看具体是哪个接口是这两条线
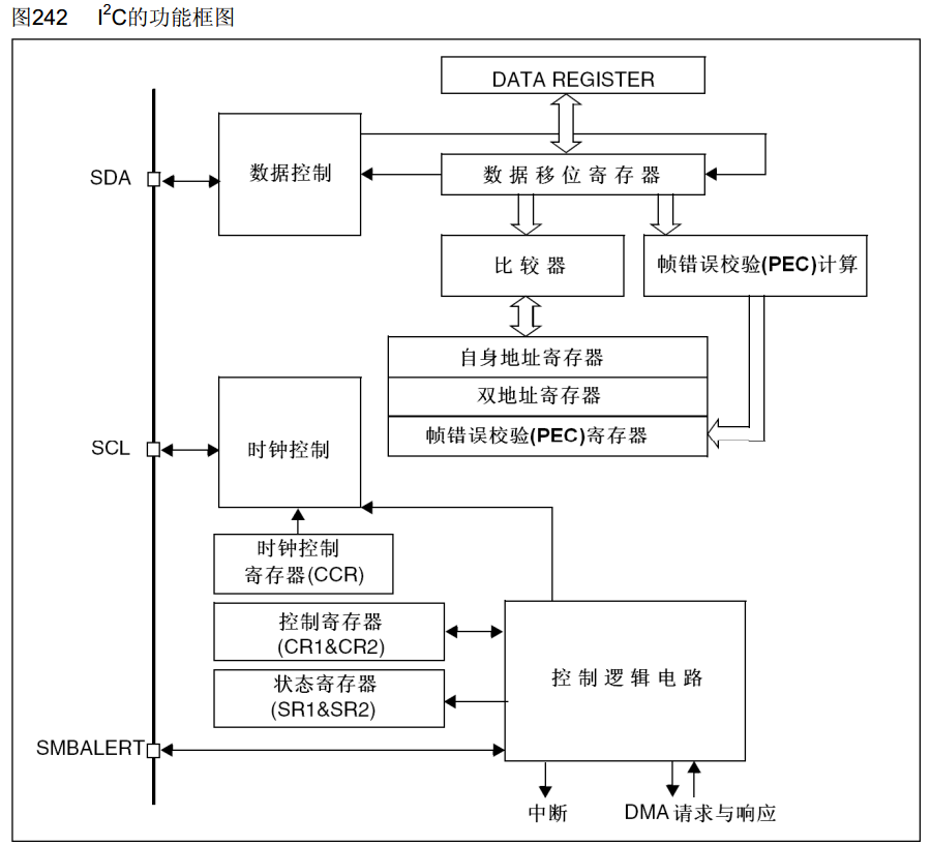
这个功能框图还是很好理解的吧,首先看上面的SDA,可知的是,比较器和帧错误校验这一块目前是不用的,这两块是STM32本身作为从机的时候进行校验地址位用的
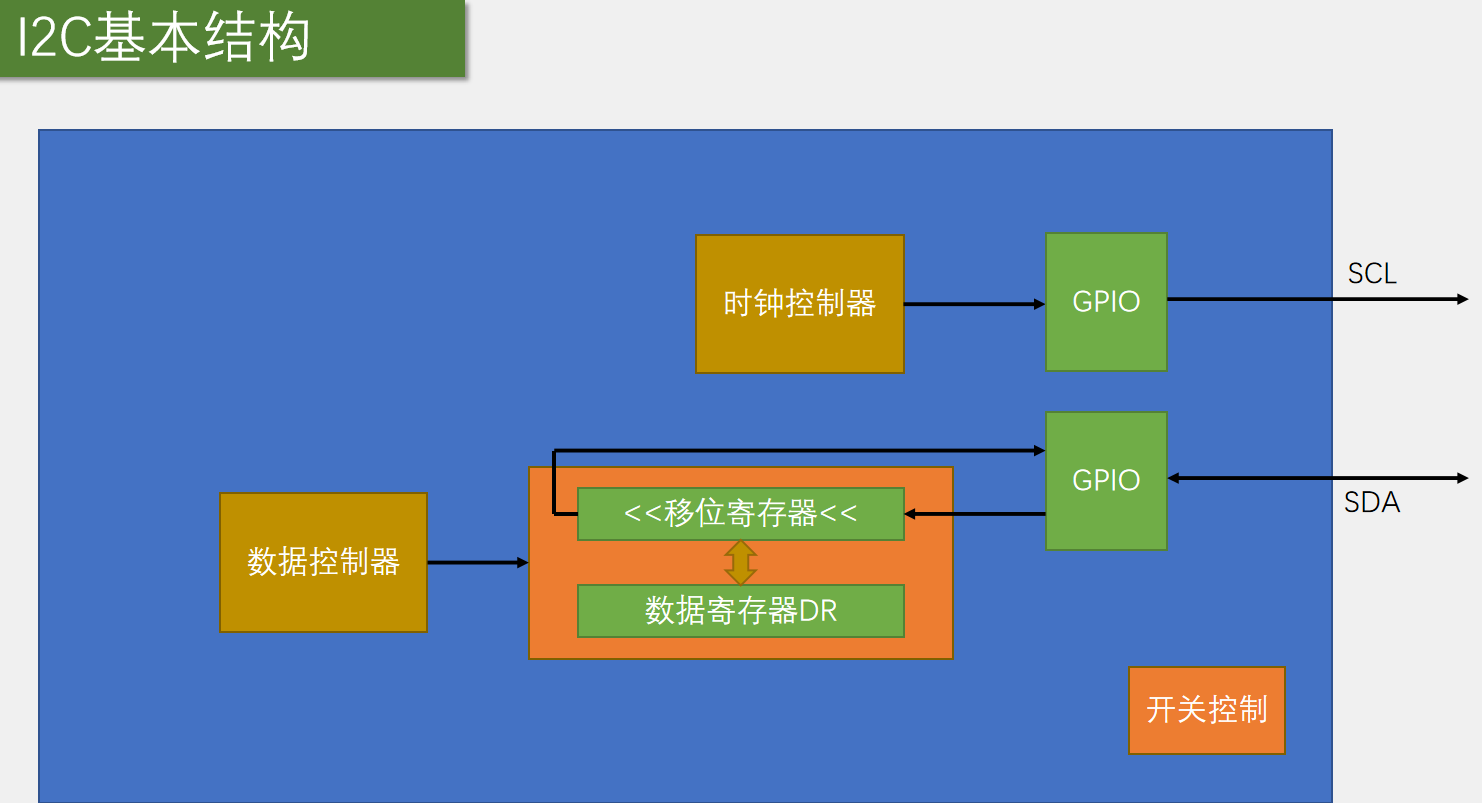
省去不必要的结构,这是我们剩下的结构
=========================================================================
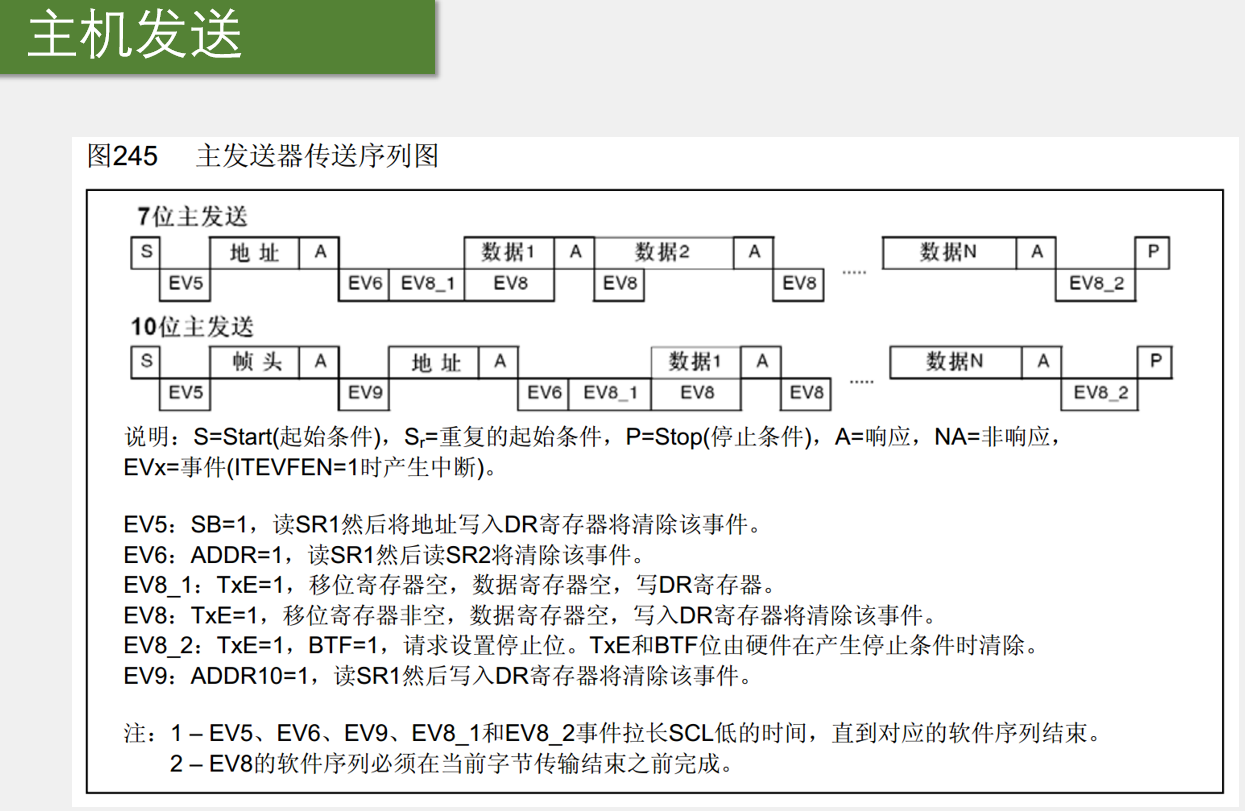
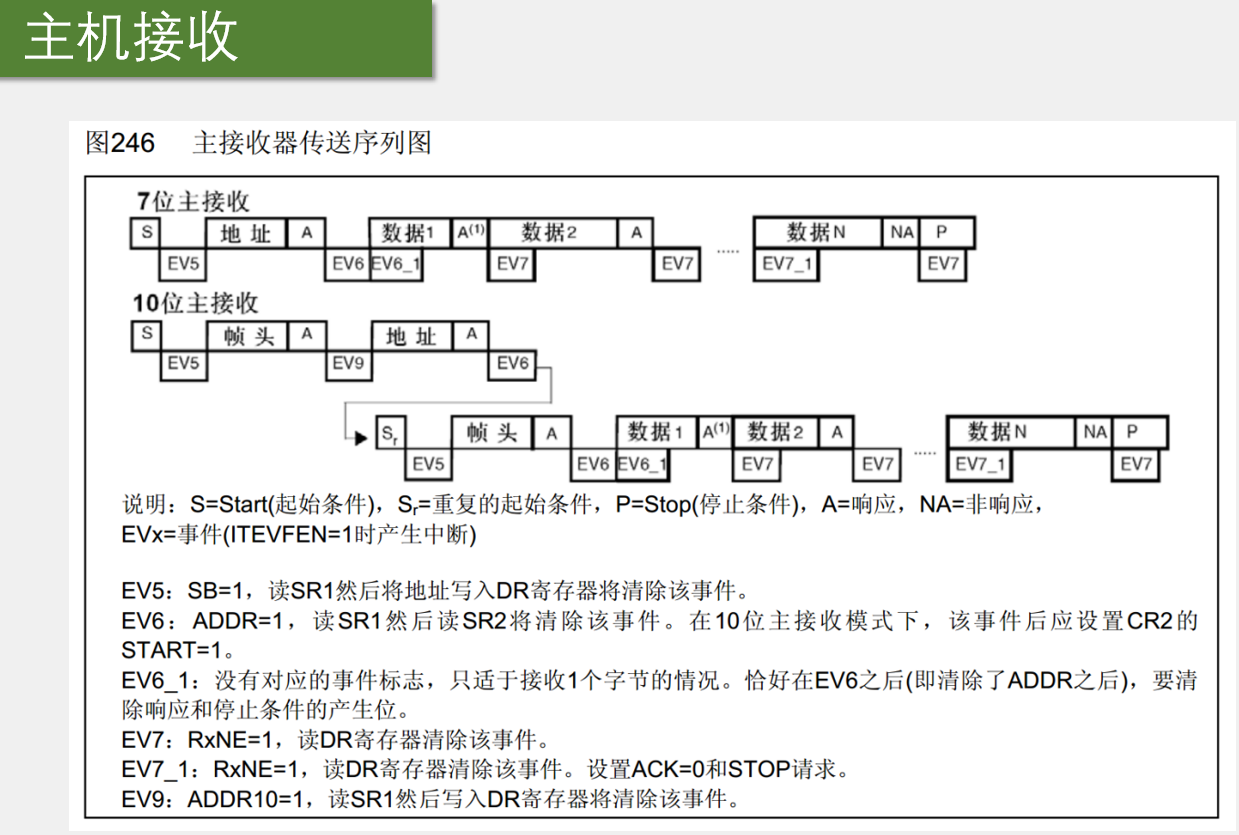
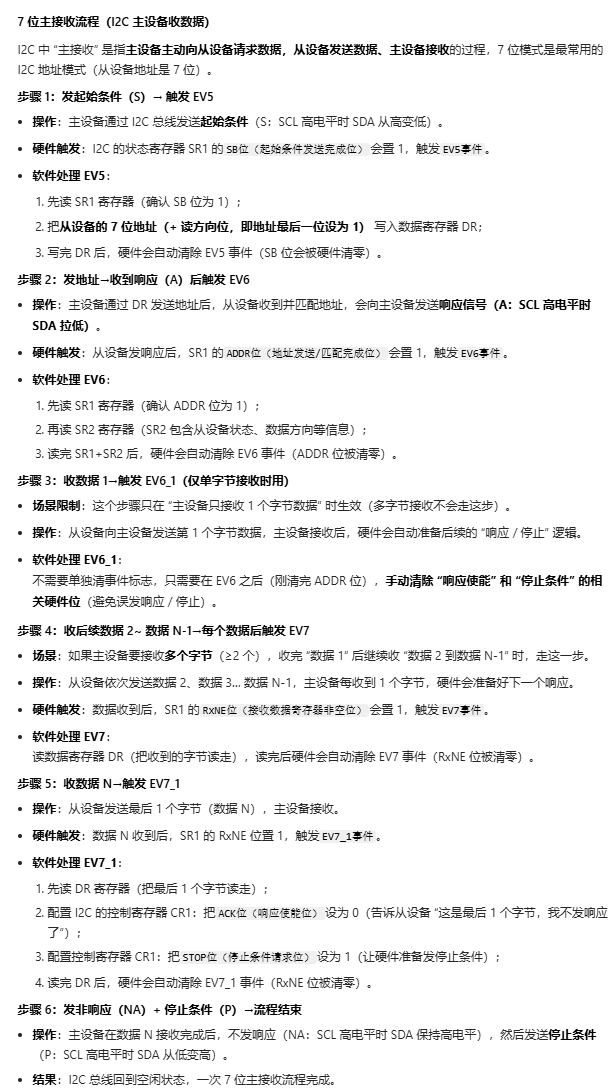
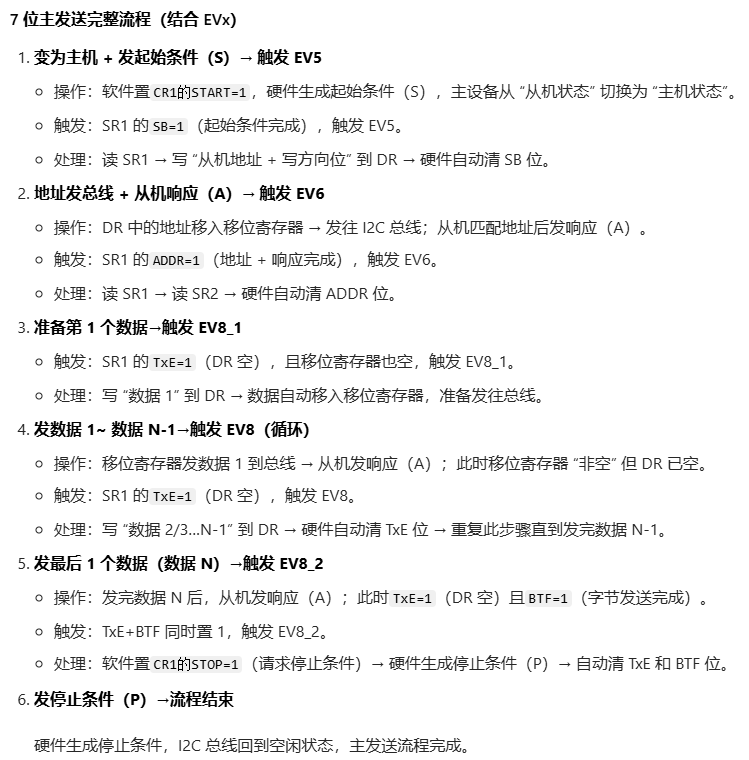
由于SMT32默认是从机状态,所以要先通过s=1,产生起始条件,变为主机状态,并且将s=1存储到控制寄存器中
然后执行EV5,读取控制器寄存器,得知了主机已经准备好了,写入从机地址然后将控制寄存器中的s=1清楚,先将地址写入到DR寄存器中,然后再进入移位寄存器中,然后再进入到I2C总线上去
然后执行A,从机自动响应是不是自己
EV6:ADDR=1的意思就是,从机已经收到地址,然后发了应答信号A,主机读到了这个信息,然后硬件自动将SR1和SR2清楚
EV8_1:首先TxE=1的意思就是状态寄存器表明数据寄存器空了,该往里面填写东西了,后面就很好理解了,开始往数据寄存器写东西了
EV8:由于上个时候,移位和数据都是空的,所以数据寄存器把东西移到了移位寄存器,但是此时移位寄存器还在运输数据,但是此时的数据寄存器已经空了,这里就是TxE=1的意思,继续往数据寄存器写入数据,此时硬件会自动将状态寄存器中的TxE=1给清楚了
A:选择继续发送还是不发送了
EV8:然后继续,移位寄存器在传送,但是此时数据寄存器空了,状态寄存器置1,表示快发数据,然后被硬件自动清楚
EV8_2:很简单就是说在TxE=1和BTF=1,就是说移位寄存器在工作,数据寄存器是空的,然后结束传送,然后状态寄存器中的TxE=1和BTF=1被硬件自动清除
=========================================================================
①:开启I2C外设以及开启对应的GPIO时钟
②:把 I2C 外设对应的 GPIO 口初始化为复用开漏模
③:使用结构体,对整个 I2C 进行配置
④:通过 I2C_Cmd 函数,使能 I2C 外设
================所需要的函数===============================================
=========================================================================main.c
cpp
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
int main(void)
{
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}MPU6050.c
cpp
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000;
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS)
{
Timeout --;
if (Timeout == 0)
{
break;
}
}
}
//这里重新封装了一下,防止意外卡死
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
I2C_SendData(I2C2, RegAddress);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);
I2C_SendData(I2C2, Data);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);
I2C_GenerateSTOP(I2C2, ENABLE);
}
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
I2C_SendData(I2C2, RegAddress);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);
I2C_AcknowledgeConfig(I2C2, DISABLE);
I2C_GenerateSTOP(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);
Data = I2C_ReceiveData(I2C2);
I2C_AcknowledgeConfig(I2C2, ENABLE);
return Data;
}
void MPU6050_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;//这是固定的
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_ClockSpeed = 50000;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;//应答功能开启
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
//这两行都是stm32作为从机的时候,所需要配置的
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Cmd(I2C2, ENABLE);
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}MPU6050.h
cpp
#ifndef __MPU6050_H
#define __MPU6050_H
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif