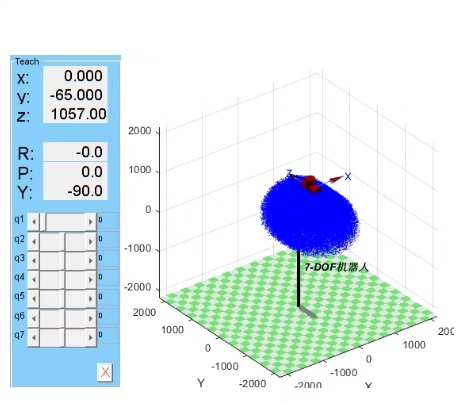
机械臂工作空间仿真分析-6 蒙特卡洛法,七自由度机械臂。
蒙特卡洛法玩机械臂就像在工地撒豆子------撒得越多,轮廓越清晰。今天咱们拿七轴机械臂开刀,用Python折腾个工作空间三维点云图。别被自由度吓到,这玩意儿的关键在于敢让随机数飞一会儿。
先整点硬核的,关节角随机生成器得够浪:
python
import numpy as np
def random_joints():
joints = np.zeros(7)
joints[0] = np.random.uniform(-170, 170) # 基座旋转要疯
joints[1:6] = np.random.uniform(-90, 90, 5) # 中间关节别太放肆
joints[6] = np.random.uniform(-175, 175) # 腕部得灵活
return np.deg2rad(joints)这段代码的精髓在角度限制的把握,基座和腕部撒欢转,中间关节悠着点防止自残。注意这里用弧度制是因为后面要做矩阵计算,谁用度数谁傻。
正运动学才是重头戏,DH参数处理得讲究:
python
def forward_kinematics(joints):
dh_table = [
[0, 0.3, 0, joints[0]],
[np.pi/2, 0, 0, joints[1]],
[0, 0.6, 0, joints[2]],
[-np.pi/2, 0, 0.2, joints[3]],
[0, 0.5, 0, joints[4]],
[np.pi/2, 0, 0, joints[5]],
[-np.pi/2, 0, 0.1, joints[6]]
]
T = np.eye(4)
for alpha, a, d, theta in dh_table:
# 齐次变换矩阵拼接
Ti = np.array([
[np.cos(theta), -np.sin(theta)*np.cos(alpha), np.sin(theta)*np.sin(alpha), a*np.cos(theta)],
[np.sin(theta), np.cos(theta)*np.cos(alpha), -np.cos(theta)*np.sin(alpha), a*np.sin(theta)],
[0, np.sin(alpha), np.cos(alpha), d],
[0, 0, 0, 1]
])
T = T @ Ti
return T[:3, 3] # 只要末端坐标这里矩阵连乘是关键,每次都用当前变换矩阵左乘新的DH矩阵。注意Python的@运算符做矩阵乘法比np.dot()更直观。末端只要位置不要姿态,所以取前三行最后一列。
主程序就是个大力出奇迹的循环:
python
points = []
for _ in range(100000):
q = random_joints()
pos = forward_kinematics(q)
points.append(pos)
# 转numpy数组方便处理
points = np.array(points)十万次迭代起步,少了显不出蒙特卡洛的霸气。实测i7处理器跑这个大概需要两分钟,等着的时候可以泡杯咖啡。
可视化得用上matplotlib的3D神器:
python
import matplotlib.pyplot as plt
fig = plt.figure(figsize=(10,8))
ax = fig.add_subplot(111, projection='3d')
ax.scatter(points[:,0], points[:,1], points[:,2],
s=1, alpha=0.3, c=points[:,2], cmap='viridis')
ax.view_init(elev=15, azim=60) # 找个帅气视角
plt.tight_layout()
plt.show()s参数控制点的大小,alpha调透明度防止黑乎乎一坨。用z轴值着色后,立体感瞬间爆炸。注意坐标系方向要和机械臂实际安装方向一致,别整出倒立的模型。
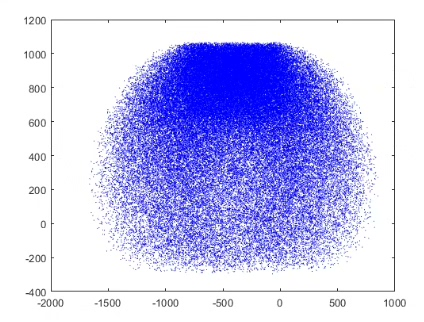
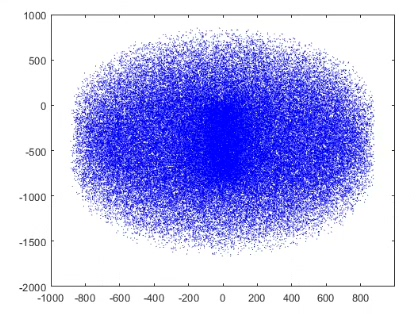
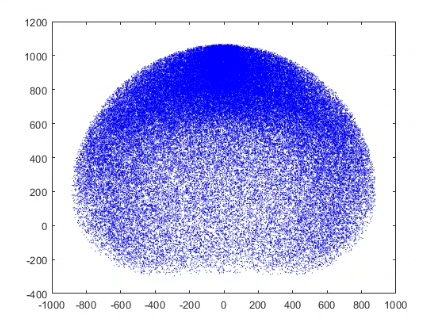
跑出来的效果应该是个扁椭球带缺口的形态,七自由度特有的灵活区域会呈现章鱼触手般的分布。想要边界清晰就加大采样量,不过小心显卡冒烟。这种方法的妙处在于绕过了逆运动学的地狱级难度------管你几轴,我只管往前算,这就是暴力美学的魅力。
进阶玩法可以给点云做凸包计算,或者用K-means聚类找高密度区域。有闲心的还能加点障碍物碰撞检测,让无效区域自动变红。不过那都是后话,先把这坨五彩斑斓的点云炫到老板脸上再说。