🔥作者简介: 一个平凡而乐于分享的小比特,中南民族大学通信工程专业研究生,研究方向无线联邦学习
🎬擅长领域:驱动开发,嵌入式软件开发,BSP开发
❄️作者主页:一个平凡而乐于分享的小比特的个人主页
✨收录专栏:硬件知识,本专栏为记录项目中用到的知识点,以及一些硬件常识总结
欢迎大家点赞 👍 收藏 ⭐ 加关注哦!💖💖

软件定时器 vs 硬件定时器详解
一、定时器的基本作用
定时器就像是单片机的"秒表",用于精确计时、产生时间间隔或波形。想象一下做饭时的两种计时方式:
- 硬件定时器:像微波炉定时器,设好时间后就能独立工作
- 软件定时器:像看着手表不断检查时间的厨师
二、核心区别对比
| 特性 | 软件定时器 | 硬件定时器 |
|---|---|---|
| 本质 | 软件程序实现,依赖CPU执行 | 独立硬件电路,与CPU并行工作 |
| 精度 | 低(毫秒级,受系统负载影响) | 高(纳秒~微秒级,非常稳定) |
| CPU占用 | 高(需要CPU参与计时) | 低(独立运行,仅中断时占用CPU) |
| 可靠性 | 低(程序崩溃则定时失效) | 高(硬件级可靠性) |
| 数量限制 | 理论上无限(受内存限制) | 有限(由硬件决定,通常2-8个) |
| 功耗 | 高(需要CPU保持运行) | 低(可让CPU休眠) |
| 响应速度 | 慢(需要等待调度) | 快(硬件中断立即响应) |
| 实现复杂度 | 简单(纯软件实现) | 复杂(需要配置硬件寄存器) |
三、软件定时器详解
工作原理
c
// 简化的软件定时器实现原理
uint32_t system_tick = 0; // 系统滴答计数器
// 1ms系统滴答中断(由硬件定时器提供基准)
void SysTick_Handler(void) {
system_tick++;
}
// 软件定时器结构
typedef struct {
uint32_t start_tick; // 启动时的滴答数
uint32_t interval; // 定时间隔
bool is_running; // 运行状态
} SoftTimer;
// 检查定时器是否到期
bool soft_timer_expired(SoftTimer *timer) {
if (!timer->is_running) return false;
uint32_t elapsed = system_tick - timer->start_tick;
return (elapsed >= timer->interval);
}
// 使用示例:在主循环中轮询检查
while(1) {
if (soft_timer_expired(&my_timer)) {
do_something();
restart_timer(&my_timer);
}
// 其他任务...
}实现方式图解
text
┌─────────────────────────────────────────┐
│ 主程序循环 │
├─────────────────────────────────────────┤
│ 任务A │ 检查软件定时器1 │ 任务B │ 检查... │
└─────┬───────────────────────────────┬───┘
│ │
▼ ▼
┌────────────┐ ┌────────────┐
│ 定时器1 │ │ 定时器N │
│ 计数器递增 │ │ 计数器递增 │
│ 检查是否到期│ │ 检查是否到期│
└────────────┘ └────────────┘
│ │
▼ ▼
┌────────────┐ ┌────────────┐
│ 执行回调函数│ │ 执行回调函数│
│ 或设置标志位│ │ 或设置标志位│
└────────────┘ └────────────┘四、硬件定时器详解
工作原理
text
硬件结构:
┌─────────────────────────────────────┐
│ 硬件定时器模块 │
├─────────────────────────────────────┤
│ 时钟源 → 预分频器 → 计数器 → 比较寄存器 │
│ (Prescaler) (CNT) (ARR/CCR)│
└──────────────────────┬──────────────┘
│
到达设定值
│
产生中断/事件
▼
┌─────────────────────────────────────┐
│ CPU响应中断 │
│ 或外设直接使用定时器输出信号 │
└─────────────────────────────────────┘工作模式
c
// STM32硬件定时器配置示例
void TIM2_Init(void) {
// 1. 使能定时器时钟
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN;
// 2. 配置预分频器和自动重载值
// 假设系统时钟72MHz,预分频72,得到1MHz计数频率
TIM2->PSC = 72 - 1; // 预分频器
TIM2->ARR = 1000 - 1; // 自动重载值,1ms中断
// 3. 使能更新中断
TIM2->DIER |= TIM_DIER_UIE;
// 4. 启动定时器
TIM2->CR1 |= TIM_CR1_CEN;
// 5. 配置NVIC中断
NVIC_EnableIRQ(TIM2_IRQn);
}
// 定时器中断服务函数
void TIM2_IRQHandler(void) {
if (TIM2->SR & TIM_SR_UIF) {
TIM2->SR &= ~TIM_SR_UIF; // 清除中断标志
// 定时任务处理
hardware_timer_callback();
}
}五、应用场景对比
适合使用软件定时器的场景 ✅
场景1:时间精度要求不高的延时
c
// 简单的毫秒延时函数
void soft_delay_ms(uint32_t ms) {
uint32_t start = get_system_tick();
while ((get_system_tick() - start) < ms) {
// 空循环等待,精度要求不高
}
}
// 应用:按键消抖、LED呼吸灯效果
// 精度要求:±10ms可接受场景2:需要大量定时器的应用
text
应用:物联网设备管理多个连接超时
需求:每个TCP连接需要独立的心跳超时检测
数量:可能需要几十甚至上百个定时器
方案:软件定时器管理器,用链表管理所有定时器场景3:逻辑简单的定时任务
python
# 伪代码:简单的状态机定时
class Task:
def __init__(self):
self.next_check_time = 0
def run(self):
current_time = time.time()
if current_time >= self.next_check_time:
self.do_task()
self.next_check_time = current_time + 1.0 # 1秒后再次执行
# 应用:周期性数据上报、状态更新场景4:原型开发和快速验证
text
优势:不需要配置复杂硬件寄存器
开发流程:先用软件定时器实现功能 → 测试验证 →
如有性能需求再改用硬件定时器适合使用硬件定时器的场景 ✅
场景1:高精度时间测量
text
应用:超声波测距、转速测量
原理:测量脉冲宽度
精度要求:微秒级精度
硬件定时器优势:输入捕获功能直接测量脉冲时间场景2:精确波形生成
text
应用:PWM电机控制、DAC波形输出
需求:稳定的频率和占空比
硬件方案:
┌─────────────┐
│ 定时器 │→ PWM输出 → 电机驱动
│ 自动重载 │ 频率精确到0.1%
└─────────────┘
软件方案不可靠:CPU负载变化会导致PWM抖动场景3:实时性要求高的任务
c
// 硬件定时器用于精确控制步进电机
void TIM1_PWM_Init(void) {
// 配置为精确的200Hz PWM,控制步进电机步进
// 任何时间偏差都会导致电机振动或失步
}
// 对比软件方案:如果使用软件延时控制步进,
// 其他中断可能干扰时序,导致电机运行不平滑场景4:低功耗应用
text
应用:电池供电的无线传感器
需求:大部分时间CPU休眠,定时唤醒采集数据
硬件方案:
┌─────────────┐
│ RTC定时器 │→ 每5分钟唤醒CPU一次
│ (低功耗) │
└─────────────┘
CPU休眠功耗:1μA
软件方案:无法实现,因为CPU需要运行才能计时六、混合使用方案
实际项目中的典型架构
text
┌─────────────────────────────────────┐
│ 硬件定时器层 │
├─────────────────────────────────────┤
│ TIM1: 1ms系统滴答 (SysTick) │ ← 提供时间基准
│ TIM2: 100μs高精度测量 │
│ TIM3: 10kHz PWM输出 │
│ TIM4: 1Hz RTC闹钟 │
└──────────────────┬──────────────────┘
│ 提供精确时间基准
┌──────────────────▼──────────────────┐
│ 软件定时器管理器 │
├─────────────────────────────────────┤
│ 定时器列表: │
│ - TCP心跳超时 (30s) │
│ - 界面刷新 (100ms) │
│ - 数据保存定时 (5min) │
│ - LED闪烁控制 (500ms) │
└─────────────────────────────────────┘代码示例:混合方案
c
// 系统基础设施:硬件定时器提供1ms滴答
void SysTick_Handler(void) {
system_tick++; // 全局计数器
// 软件定时器滴答(每个定时器计数递减)
for (int i = 0; i < MAX_SOFT_TIMERS; i++) {
if (soft_timers[i].active && soft_timers[i].count > 0) {
soft_timers[i].count--;
if (soft_timers[i].count == 0) {
soft_timers[i].callback(soft_timers[i].arg);
}
}
}
}
// 应用层:高精度任务用硬件定时器
void TIM2_IRQHandler(void) {
// 精确的100μs数据采样
adc_sample = ADC_Read();
process_sample(adc_sample);
}
// 应用层:普通定时任务用软件定时器
void check_network_status(void) {
// 每1秒检查网络状态(精度要求不高)
if (soft_timer_expired(&network_timer)) {
update_network_status();
restart_soft_timer(&network_timer, 1000);
}
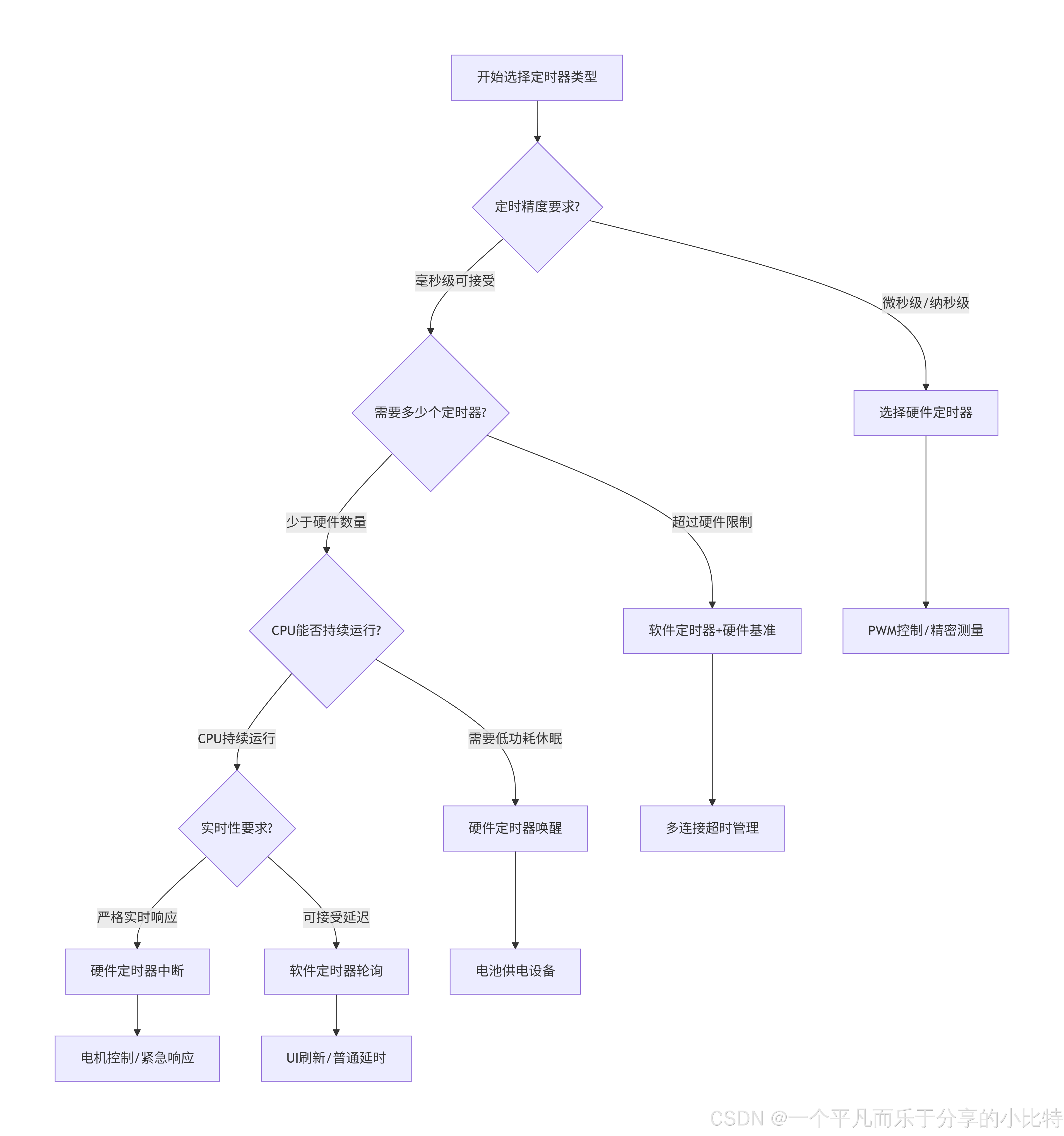
}七、选择流程图
八、实际案例
案例1:智能温控器
- 硬件定时器:PID控制循环(10ms精确间隔),PWM输出控制加热器
- 软件定时器:界面刷新(100ms),温度显示更新(1s),WiFi重连检查(30s)
- 理由:关键控制需要精确时序,非关键任务可放宽要求
案例2:网络路由器
- 硬件定时器:以太网MAC定时,PPPoE心跳
- 软件定时器:DHCP租期管理,ARP缓存超时,NAT会话超时(可能上百个)
- 理由:协议要求精确时序用硬件,大量连接管理用软件
案例3:手持医疗设备
- 全部使用硬件定时器
- 理由:医疗设备对可靠性和时序要求极高,不允许定时误差
案例4:智能家居网关
- 混合方案 :
- 硬件:Zigbee/蓝牙通信时序,RTC闹钟
- 软件:设备状态同步,场景定时执行,日志上传
- 理由:平衡性能和成本,关键通信用硬件,管理任务用软件
九、性能对比数据
| 指标 | 软件定时器 | 硬件定时器 |
|---|---|---|
| 最小间隔 | 通常1ms以上 | 可达10ns(取决于时钟频率) |
| 时间抖动 | 1-10ms(受系统负载影响) | < 0.1%(非常稳定) |
| 创建100个定时器 | 容易,但消耗CPU时间检查 | 不可能,硬件数量有限 |
| CPU休眠时工作 | 不能 | 可以(部分定时器支持) |
| 中断响应延迟 | 轮询延迟(可能几十ms) | 硬件中断(通常<1μs) |
十、总结建议
选择原则
- 精度优先原则:微秒级需求必选硬件定时器
- 可靠性优先:关键系统功能使用硬件定时器
- 数量优先:需要大量定时器时,软件定时器更合适
- 功耗优先:需要CPU休眠时,必须使用硬件定时器
- 开发效率:快速原型可先用软件定时器
最佳实践
-
基准原则:至少使用一个硬件定时器提供系统时间基准
-
分层设计:
text底层:硬件定时器提供精确时间服务 中间层:软件定时器管理器提供多定时器支持 应用层:根据需求选择合适的定时器类型 -
动态切换:高级系统可根据负载动态调整定时器策略
-
监控机制:为软件定时器添加超时监控,防止因系统繁忙失效
一句话总结
硬件定时器是做"硬"事的专家------精确、可靠、独立;软件定时器是管"软"事的多面手------灵活、数量多、易用。实际项目中,它们通常是搭档而非对手,共同构建稳健的时间管理系统。