前言:
在追求极致人机交互的数字化时代,作为高频核心输入设备的鼠标,其滚轮体验的每一次进化都深刻影响着我们的操作效率与流畅感。当前,以机械与光栅编码器 为代表的确定性交互方案 ,凭借清晰的段落反馈和可靠耐用的特性,定义了精准、可控的经典操作范式。然而,面对海量信息浏览与长文档处理的需求,一种更为智能的动态交互范式 ------惯性滚动方案 (如磁编码器与磁悬浮技术)应运而生。它通过感知用户操作意图,在精准刻度与无阻尼惯性滚动间智能切换,将滚轮从被动的"指令执行器"转变为主动的"效率加速器"。但当前主流的惯性滚动方案或多或少都有一些弊端(体积大,成本高等),本文将从技术原理、实施方案等多维度方面对当前的主流方案进行分析以及探究全新的解决方案
一、鼠标惯性滚轮方案分类体系
惯性滚动方案主要分为以下几个体系
1.1、机械式

- **原理:**物理棘轮离合:通过物理结构(如离合拨杆或推杆)使棘轮分离或啮合,实现阻尼切换
- **阻尼调节方式:**手动/物理切换。用户通过按钮或拨动滚轮本身,触发内部机械结构改变棘轮状态。
- **关键部位:**弹簧、棘爪、棘轮、离合推杆/拨杆。
- **优点:**结构直观可靠,成本低,技术成熟。
- **缺点及成本解析:**体验割裂,模式切换生硬,无法智能响应。成本低,均为成熟机械件,易于生产和维修
- 代表产品及链接:罗技G502
1.2、电磁式
- **原理:**电磁力控制,通过给电磁铁/螺线管通电,利用磁力吸附或推开阻尼部件(如棘爪或磁环),改变滚轮阻力
- **阻尼调节方式:**自动/智能切换。主控芯片根据滚轮转速信号,实时控制电磁铁通断。
- **关键部位:**电磁铁/螺线管、永磁体、霍尔传感器(测速/角度)、主控芯片。
- **优点:**可实现无缝的"速度判定"自动切换,体验佳。
- **缺点及成本解析:**结构复杂,涉及电、磁、机械精密配合。成本高。传感器、定制电磁件及复杂算法是主要成本。
- 代表产品及链接:罗技MX Master3
1.3、电机式

- **原理:**当达到一定速度后,电机拨杆向内拨动,释放滚轮,实现自由滚动。
- **阻尼调节方式:**自动/智能切换。跟电磁式接近,主控芯片根据滚轮转速信号,控制电机释放卡环,从而实现无阻力滚动。
- **关键部位:**微型电机、高精度编码器、驱动电路、主控芯片。
- **优点:**可通过"速度判定"自动切换,体验感更舒服。
- **缺点及成本解析:**结构最复杂:集成电机与精密传动系统。功耗与成本高。高功耗不适于无线鼠标,电机与控制系统成本高昂。
- 代表产品及链接:雷蛇鼠标
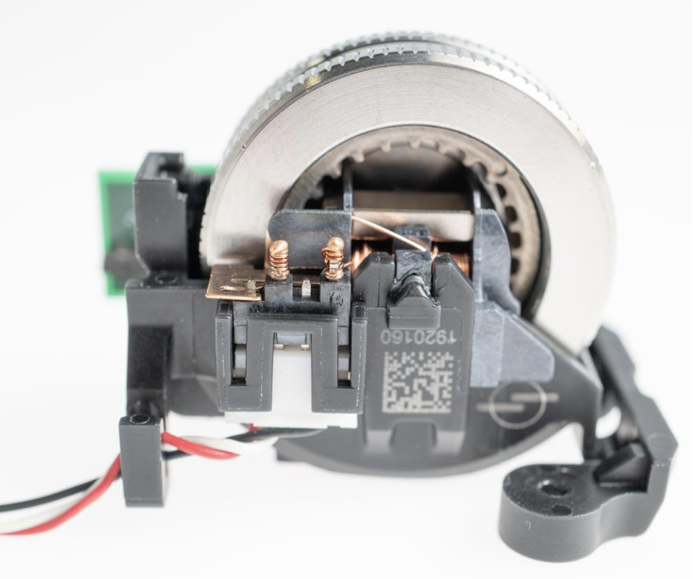
1.4、芯片式(创新方案)
- **原理:**通过控制芯片内置的触摸检测和高精度惯性滚动算法实现
- **阻尼调节方式:**算法参数调节,可定制物理调节方式,实现实时调节
- **关键部位:**控制芯片
- **优点:**低成本+超小封装,既有鼠标无需修改结构以及重新开模,即插即用,不额外增加鼠标重量和鼠标体积,并且待机功耗仅11ua
- **缺点及成本解析:**相较于传统方案,略带一点用户学习成本,但上手很快,1分钟左右可上手。方案成本低,仅单颗IC芯片成本,无需额外增加其余任何器件。
- 代表产品及链接:Cheerdots魔法滚轮鼠标
二、芯片式方案参数
2.1、核心技术特性

2.2、芯片技术参数
|------------|---------------------------------|
| 参数类型 | 参数值 |
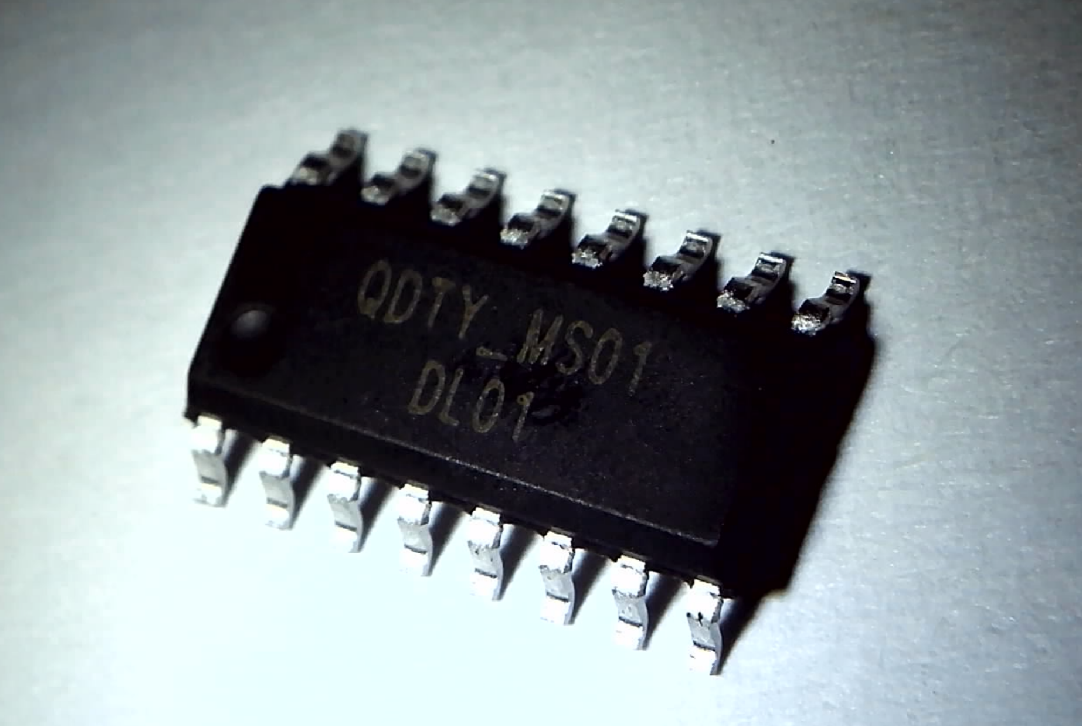
| 型号 | QDTY-MS01 |
| 封装 | SOP16 |
| 工作电压 | 2.6V ~ 5.5V |
| 工作温度 | -20℃ ~ 85℃ |
| 工作电流 | 2.2mA @ 3V(高频运行,32MHz) |
| 静态电流 | 11μA @ 3V(低频运行,触控/滚轮可唤醒) |
| 通信接口 | I2C(从机地址0xA0,支持100kbps/400kbps) |
| 触摸检测通道 | 1路高精度电容触摸检测 |
| 编码器接口 | 支持标准正交编码器(A/B相) |
| 中断引脚 | RDY引脚,数据就绪中断输出 |
2.3、芯片可调参数
|------------|-----------|-----------|------------------|
| 参数名称 | 寄存器地址 | 调节范围 | 功能说明 |
| 滚轮方向 | 0x10 | 0-1 | 正向/反向滚动切换 |
| 初始速度增益 | 0x11 | 0-100 | 惯性滚动初始速度倍率 |
| 滚轮阻尼 | 0x12 | 0-10(10档) | 阻尼越大,停止越快 |
| 惯性滚动开关 | 0x13 | 0-1 | 开启/关闭惯性滚动 |
| 逐行滚动时间 | 0x14 | 0-100 | 逐行滚动超时设置(5-200秒) |
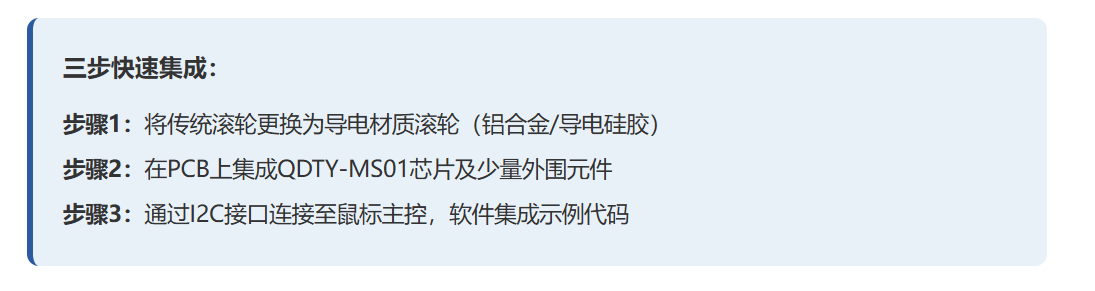
2.4、芯片集成步骤
2.5、核心专利布局

三、解决方案落地难度
|------|-------------------------------------------------------------------------|----|-------------------------------------------------|
| 方案类型 | 关键难点 | 难度 | 风险 |
| 机械式 | 需增加物理离合机构,因此对结构具有较大要求 | 低 | 无 |
| 电磁式 | 1. 精密电磁结构设计 2. 实时速度检测与控制算法 3. 功耗与成本控制 | 高 | 罗技等厂商已申请相关专利且合作门槛很高,,因此具有侵权风险 |
| 电机式 | 1.需要高精度电机与编码器 2. 软件算法极其复杂 3. 成本与售价难以平衡 4. 结构极复杂,空间与功耗矛盾 | 极高 | 技术实施难度很高 |
| 芯片式 | 无 | 极低 | 无,原厂虽以申请相关专利,但目前开放商业合作,因此可直接联系原厂进行合作,进而避免专利侵权风险 |
附:芯片式解决方案原厂联系方式:andrew_jiajie@cheerdots.com
四、总结
在当前鼠标滚轮的技术演进中,目前的四种方案清晰地划出了从"物理手动"到"智能自动",再到"软件定义"的路径。机械式 方案以纯物理结构实现手动切换,成本最低但体验割裂;电磁式 方案通过电磁铁与传感器的结合,实现了基于速度的智能自动切换,但同样面临结构与成本的难题;电机式 方案虽能实现全编程控制,但因结构复杂、功耗与成本极高,仍停留在概念阶段;而创新的芯片式方案则另辟蹊径,通过高度集成的芯片算法模拟阻尼效果,以极低的成本、功耗和近乎零的结构影响,代表了未来向"软件定义硬件"和极致集成化发展的颠覆性方向。