摘要------我们提出了一种先进的算法,用于抑制使用 OFDM 信号进行监视的被动雷达系统中的多径杂波。多径杂波信号不仅会在距离多普勒域中导致巨大的零多普勒信号,而且当多径信号相对于参考信号具有额外的小多普勒偏移时,还会诱发强烈的旁瓣,从而可能掩盖具有小多普勒频率和小 SNR 的目标。所提出的算法被称为通过载波和多普勒移位的增强消除算法(Enhanced Cancellation Algorithm by Carrier and Doppler Shift,CA-CD),它能够消除多径杂波信号并降低其旁瓣。其实施和实验测试表明了实时抑制多径信号的有效性。
文章目录
-
- [I. INTRODUCTION](#I. INTRODUCTION)
- [II. SIGNAL PROCESSING](#II. SIGNAL PROCESSING)
- [III. ENHANCED CANCELLATION ALGORITHM BY CARRIER AND DOPPLER SHIFT](#III. ENHANCED CANCELLATION ALGORITHM BY CARRIER AND DOPPLER SHIFT)
- [IV. EXPERIMENTAL SYSTEM](#IV. EXPERIMENTAL SYSTEM)
- [V. EXPERIMENTAL RESULTS](#V. EXPERIMENTAL RESULTS)
I. INTRODUCTION
对被动雷达系统(也称为被动双基雷达)的关注正在日益增加,与其相比于主动雷达系统的优势有关:它们利用机会照射源(illuminators of opportunity)的信号,这些源不需要是协作的,因此不需要专门的频段。此外,被动雷达有望降低成本,并且可以在不被发现的情况下运行。
广泛可用的照射源是地面广播发射机,包括模拟信号(如 FM 广播和模拟电视)以及数字信号(如 DAB 广播和 DVB-T 电视)。DVB-T 是我们的首选系统,因为它部署广泛,具有高辐射功率和有利的波形。其高带宽和符号结构提供了良好的距离和多普勒分辨率。
在被动雷达系统中,目标的探测是通过机会照射源到达的直接路径信号与经目标反射的信号之间的时间差来完成的。这是通过将监视信号与直接参考信号及其多普勒移位副本进行相关运算来实现的。
在大多数情况下,监视信号不仅包含来自目标的反射信号。它还包含来自所选照射源的直接信号以及干扰目标探测的多径杂波。此外,具有小多普勒频率的多径杂波不仅会掩盖具有相同多普勒频率和信号路径长度的微弱目标,还会由于其旁瓣掩盖具有不同多普勒频率或信号路径长度的其他微弱目标。
此前人们使用了不同的方法进行杂波消除,它们都基于将监视信号投影到与直接信号正交的子空间中。
在本论文中,我们提出了一种算法,用于抑制所有的多径杂波,无论其路径长度如何,也不论其是否具有小多普勒偏移。此后,我们将介绍用于测试该算法的被动雷达系统,并随后展示证明该方法有效性的实验结果。
II. SIGNAL PROCESSING
被动雷达系统探测目标的主要任务是计算监视信号与参考信号的二维互相关函数。由于其数字特性(digital nature),参考信号可以被解码并重构,而不受任何多径分布的影响。来自接收机 Rx \text{Rx} Rx 的监视信号可以建模为:
s R x ( t ) = A R x d ( t ) + ∑ l = 1 N t a l d ( t − τ l ) e j 2 π f l t + ∑ m = 1 N c , D a m d ( t − τ m ) e j 2 π f m t + ∑ i = 1 N c , 0 a i d ( t − τ i ) + n R x ( t ) (1) s_{Rx}(t) = A_{Rx}d(t) + \sum_{l=1}^{N_t} a_l d(t-\tau_l)e^{j2\pi f_l t} + \sum_{m=1}^{N_{c,D}} a_m d(t-\tau_m)e^{j2\pi f_m t} + \sum_{i=1}^{N_{c,0}} a_i d(t-\tau_i) + n_{Rx}(t) \tag{1} sRx(t)=ARxd(t)+l=1∑Ntald(t−τl)ej2πflt+m=1∑Nc,Damd(t−τm)ej2πfmt+i=1∑Nc,0aid(t−τi)+nRx(t)(1)
其中:
- d ( t ) d(t) d(t) 是来自照射源的直接信号,等同于参考信号, A R x A_{Rx} ARx 是其复幅度;
- N t N_t Nt, a l a_l al, τ l \tau_l τl 和 f l f_l fl 分别是目标的数量、第 l l l 个目标的复幅度、相对于直接路径信号的延迟以及多普勒频率;
- N c , D N_{c,D} Nc,D, a m a_m am, τ m \tau_m τm 和 f m f_m fm 类似地分别是具有小多普勒频率的地面散射体的数量、第 m m m 个散射体的复幅度、相对于直接路径信号的延迟以及多普勒频率;
- N c , 0 N_{c,0} Nc,0, a i a_i ai 和 τ i \tau_i τi 是没有任何频率偏移的地面散射体的数量、第 i i i 个散射体的复幅度以及相对于直接路径信号的延迟;
- n R x ( t ) n_{Rx}(t) nRx(t) 是接收机的热噪声。
扩展消除算法(Extensive Cancellation Algorithm,ECA)1 能够通过将监视信号投影到与散射体重构信号正交的子空间中,从而在时域内消除单个散射体的干扰信号。这种方法很有效,但必须对每个散射体都执行这种投影,随着散射体数量的增加,计算负荷也会随之增加。
由于 OFDM 信号的主要特性------它将离散数据块调制在许多不同的载波上,这些载波通过 IDFT 转换到时域并在独立的 OFDM 符号中传输------因此提出了一种按载波划分的扩展消除算法(ECA-C)2。在这里,ECA 是在每个载波的时间演化上执行的。该算法利用了 OFDM 符号的频谱与其相对于直接路径信号的延迟无关这一事实。第 k k k 个载波在 I I I 个符号上的杂波子空间为:
Q k = C k , 1 ... C k , i ... C k , I (2) \boldsymbol Q_k = C_{k,1} \\dots C_{k,i} \\dots C_{k,I} \tag{2} Qk=Ck,1...Ck,i...Ck,I(2)
其中 C k , i C_{k,i} Ck,i 是第 i i i 个符号中第 k k k 个载波的复数值,可以从解码后的参考信号中获得。第 k k k 个载波的杂波子空间投影矩阵为:
P k = Q k ( Q k H Q k ) − 1 Q k H (3) \boldsymbol P_k = \boldsymbol Q_k( \boldsymbol Q_k^H \boldsymbol Q_k)^{-1} \boldsymbol Q_k^H \tag{3} Pk=Qk(QkHQk)−1QkH(3)
III. ENHANCED CANCELLATION ALGORITHM BY CARRIER AND DOPPLER SHIFT
ECA-C 消除了所有不带多普勒偏移的多径杂波干扰。但是,由于 OFDM 信号的模糊度处理可以被修正 3,使得除了零多普勒线之外不再产生旁瓣(针对无多普勒偏移的信号),因此在通过抑制旁瓣(side lobe suppression)来提高目标探测能力方面,ECA-C 并不具备优势。
在真实的 DVB-T 被动雷达系统中,多径杂波信号不仅相对于直接路径信号有延迟,而且还表现出微小的多普勒偏移,从而在杂波信号之外产生旁瓣。为了抑制这些旁瓣,我们通过将每个载波的杂波子空间扩展两个参考载波副本(其偏移的多普勒频率为 f ECA-CD = ± 0.75 f_\text{ECA-CD} = \pm 0.75 fECA-CD=±0.75 Hz)来增强 ECA-C。扩展后的杂波子空间为:
Q k , d = Λ H Q k Q k Λ Q k , (4) \mathbf{Q}_{k,d} = \\mathbf{\\Lambda}\^H \\mathbf{Q}_k \\quad \\mathbf{Q}_k \\quad \\mathbf{\\Lambda} \\mathbf{Q}_k, \tag{4} Qk,d=ΛHQkQkΛQk,(4)
- k k k (Carrier): 代表 载波索引。该算法是针对 OFDM 信号的每一个子载波独立进行处理的,因此下标 k k k 表示这是第 k k k 个载波的子空间。
- d d d (Doppler): 代表 多普勒(Doppler)扩展。在基础的 ECA-C 算法中,子空间仅包含 Q k \mathbf{Q}_k Qk,主要针对零多普勒杂波。而在 ECA-CD 算法中,通过引入 Λ \mathbf{\Lambda} Λ 矩阵对原始子空间进行了多普勒移位操作,添加了具有微小多普勒偏移的参考信号副本。
其中 Λ \mathbf{\Lambda} Λ 是相移对角矩阵:
Λ = 1 0 ... 0 0 e j 2 π f ECA-CD T s ... 0 ⋮ ⋮ ⋱ ⋮ 0 0 ... e j 2 π f ECA-CD T s I , (5) \mathbf{\Lambda} = \begin{bmatrix} 1 & 0 & \dots & 0 \\ 0 & e^{j2\pi f_\text{ECA-CD} T_s} & \dots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \dots & e^{j2\pi f_\text{ECA-CD} T_s I} \end{bmatrix}, \tag{5} Λ= 10⋮00ej2πfECA-CDTs⋮0......⋱...00⋮ej2πfECA-CDTsI ,(5)
其中 T s T_s Ts 是 OFDM 符号持续时间, I I I 是并行处理的符号数量。这产生了一个指向多径杂波子空间的新投影矩阵:
P k , d = Q k , d ( Q k , d H Q k , d ) − 1 Q k , d H , (6) \mathbf{P}{k,d} = \mathbf{Q}{k,d}(\mathbf{Q}{k,d}^H \mathbf{Q}{k,d})^{-1} \mathbf{Q}_{k,d}^H, \tag{6} Pk,d=Qk,d(Qk,dHQk,d)−1Qk,dH,(6)
因此,不带多普勒频率以及带有小多普勒频率的多径杂波可以通过将监视信号投影到正交子空间来抑制,投影矩阵为:
P k , d ′ = ( I − P k , d ) (7) \mathbf{P}{k,d}' = (\mathbf{I} - \mathbf{P}{k,d}) \tag{7} Pk,d′=(I−Pk,d)(7)
IV. EXPERIMENTAL SYSTEM
Fraunhofer FHR 的被动雷达系统由两部分组成。接收机 LORA11 是一个由 11 个盘锥天线组成的线性阵列,阵元间距为 0.36 m,并在阵列背面增加了一个盘锥天线,以便更好地接收参考信号。这些通道被数字化并在系统的第二部分(称为 ATLAS)上进行处理。其主要特性列于表 I 中。
表 I ATLAS 的特性
| 特性 | 参数 |
|---|---|
| 频段 | 450 - 900 MHz |
| 阵列类型 | 线性 |
| 极化方式 | 垂直 |
| 通道数量 | 11 (+1) |
| 每通道带宽 | 7.16 MHz |
| 计算能力 | 88 GFLOPS |
| 实时处理 | 是 |
| 功耗 | 2 kAV |
为了测试 ECA-CD,使用了来自两次测量活动的数据。
-
第一次测量活动发生在德国北部的埃肯弗德湾。LORA11 被安置在海湾末端,面向波罗的海开口处,如图 1 所示。我们的机会照射源是基尔发射塔(Kiel Transmission Tower),其广播的 DVB-T 信号是单频网络的一部分(broadcasting DVB-T signals that
are part of a single frequency network)。它工作在 8k 传输模式,使用 6817 个 OFDM 载波,采用 16 QAM(正交幅度调制)方案,保护间隔为 1/4。我们使用了在 666 MHz 广播的 DVB-T 信号,其有效发射功率(ERP)为 47 kW。
-
第二次测量活动在慕尼黑与空中客车国防航天公司合作进行。这里的机会照射源是奥林匹克塔。DVB-T 信号在 690 MHz 广播,有效发射功率为 100 kW,使用了与基尔发射塔相同的系统参数。LORA11 被安置在照射源东北方向约 5 km 处,面向照射源的反方向(图 2)。
在两个场景中,一架来自 Fraunhofer FHR 的超轻型飞机充当协作目标。
Fraunhofer FHR 的全称是 Fraunhofer Institute for High Frequency Physics and Radar Techniques(弗劳恩霍夫高频物理与雷达技术研究所)。
目标在距离多普勒域中使用如 4 中所述的基于卡尔曼滤波的跟踪进行跟踪。为了抑制恒定信号,距离多普勒图通过先前距离多普勒图的指数平均进行归一化 5。
V. EXPERIMENTAL RESULTS
为了证明 ECA-CD 的有效性,我们分析了在埃肯弗德湾超轻型飞机在 LORA11 附近的飞行情况。

- 在图 3 (I) 中显示了该次活动的标准距离多普勒图。
- ECA-C 的有效性显示在图 3 (II) 中。
- 其与原始图的差异仅局限于零多普勒线(图 3 (III)),没有旁瓣抑制效果。
- 可以看到,图 3 (IV) 展示了应用 ECA-CD 后的距离多普勒图,
- 图 3 (V) 展示了其与原始图的差异,强调了有效的旁瓣抑制。
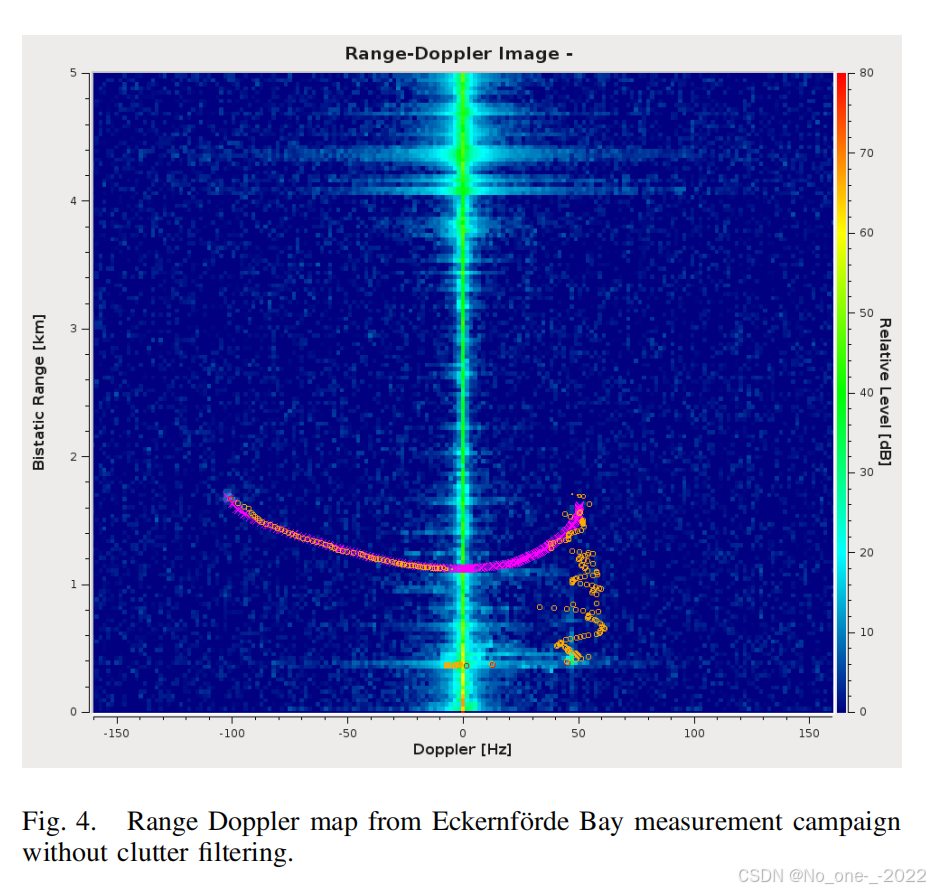
同时也进行了真实场景下的实时实现测试。在图 4 中,显示了埃肯弗德湾测量活动中未经滤波的距离多普勒图。
- 红点是被动雷达系统的轨迹,
- 橙色点是它们的历史轨迹,
- 洋红色是协作超轻型飞机的 GPS 真值。
由于杂波干扰,追踪器无法在零多普勒线附近持续跟随目标。除飞机外,还追踪到了一艘正在接近的快艇。
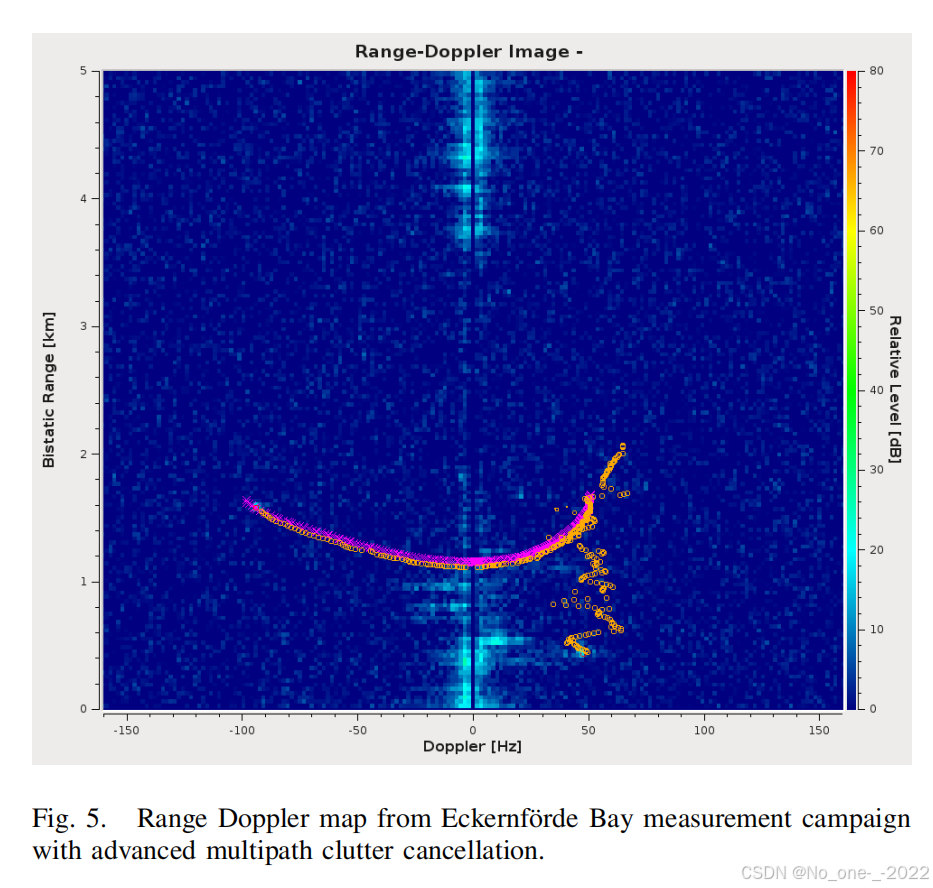
图 5 显示了使用 ECA-CD 处理后的相同数据。不仅杂波本身被抑制,其大部分旁瓣也被抑制了。这使得追踪目标可以在穿过零多普勒线时保持不中断。快艇在杂波信号之外的追踪不受该算法的影响。此外,在图 4 小距离处可见的、导致产生无真实目标轨迹的虚警也减少了。
图 6 显示了在慕尼黑测量活动中的距离多普勒图,协作目标飞行的轨迹导致其目标信号出现在零多普勒线附近且未进行杂波滤波(颜色编码与前述相同)。由于多径杂波产生的强烈旁瓣信号,系统再次无法追踪目标。使用 ECA-CD 处理监视信号实现了旁瓣信号的大幅抑制,并使得目标的追踪成为可能,如图 7 所示。