
当你坐在120吨的矿卡驾驶室里,车窗外是200米深的矿坑,方向盘却在自己转动。这不是灵异事件,而是今天矿山里的日常。但有个问题一直困扰工程师:人类驾驶员可以"眼观六路耳听八方",可机器怎么做到的?答案藏在一个巴掌大的盒子里。
先说个冷知识
无人矿卡每秒要处理的数据量,相当于同时播放50部高清电影。车身上的8个摄像头、5个激光雷达、12个毫米波雷达,全在疯狂输出信息。更要命的是,这些传感器就像一群说着不同方言的人------激光雷达说的是"点云语言",摄像头输出图像,CAN总线传的是车辆状态码。它们要怎么协同工作?
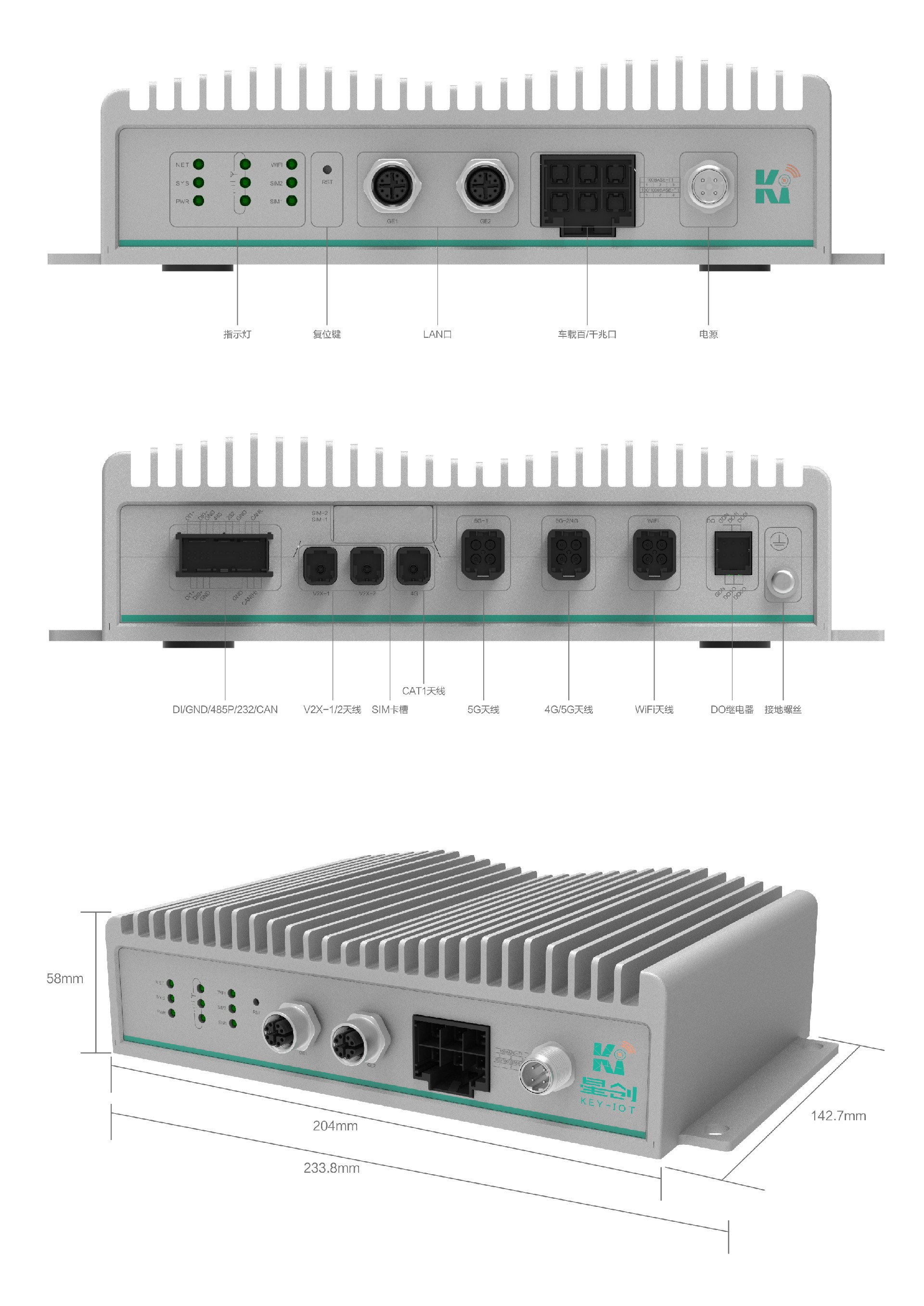
答案是车载网关,扮演的就是"翻译官"加"交通枢纽"的角色。我们用的SV910就像给矿卡装了个神经中枢。

先聊聊最核心的双5G
为什么要两个5G模块?打个比方,矿山就像信号的"鬼屋"------山体遮挡、粉尘干扰、爆破噪音,单靠一条网络就像走钢丝。SV910插两张卡,移动和联通各一张,就像给矿卡装了"双保险"。
有意思的是,这不是简单的"主备切换"。传统方案是平时用一个网络,另一个闲置等着顶替。但SV910用的是"多网加速"技术------两条5G同时工作,就像高速公路开放了两条车道,带宽直接翻倍。实测下来,单网跑40Mbps,双网能稳定到70-80Mbps。
更聪明的是,这套系统会"察言观色"。当移动信号弱了,自动把流量切到联通;等移动信号回来,又自动平衡分配。切换过程只需要200毫秒,矿卡感觉不到任何卡顿。就像你在高速上换车道,乘客根本不知道发生了什么。
【深入原理-时间同步】
再说个容易被忽视但极其关键的技术:时间同步。听起来很简单?其实这是无人驾驶最容易翻车的地方。
假设三台矿卡编队行驶,保持15米车距,时速30公里。如果时间戳偏差5毫秒会怎样?换算下来,对车距的判断误差就有4厘米。你可能觉得4厘米不算啥,但想想百吨重的矿卡,刹车距离以米计算,这点误差可能就是安全与事故的分界线。

SV910用的PTP/GPTP协议,能把整车传感器的时间误差压到1微秒以内。这是什么概念?光在1微秒里只能跑300米,而矿卡上的传感器之间距离最多几米。也就是说,激光雷达扫到前方障碍物的瞬间,摄像头、雷达、车身控制器收到的时间戳几乎完全一致。就像交响乐团,所有乐器必须精确同步,才能奏出和谐的乐章。
【应用场景-V2X】
SV910还有个特别实用的功能叫V2X------车与万物通信。在矿山里,20台矿卡在同一个区域作业,如果各开各的,就像20个人蒙着眼睛在房间里走,早晚撞一起。
有了V2X,每台车都在实时广播"我在哪、要去哪、速度多少"。就像给每台车装了"心灵感应",500米外就能知道对方的意图。两台车要在岔路口汇合?提前协商好谁先过,避免了到路口再临时刹车。这个功能让矿区通行效率提升了25%,更重要的是大幅降低了碰撞风险。
【接口设计的巧思】
再说说接口设计。SV910有6路车载以太网、2路M12工业以太网、3路CAN。这不是简单的"接口越多越好",而是精心设计的结果。
车载以太网用的T1标准,只需要一对线就能跑100Mbps,比传统以太网省了75%的线束。矿卡环境恶劣,布线空间有限,能少一根线是一根。3路CAN接口,一路读发动机数据,一路读底盘状态,一路留给调试。2路DI数字输入检测装载状态------车厢满了没有,传感器一检测,信息立刻上传调度中心。
无人驾驶听起来很酷,双5G保证网络不掉线,微秒级时间同步让传感器协同工作,V2X让车辆能"交流",丰富的接口让整车成为有机整体。这些技术听起来挺枯燥,但正是这些看不见的"神经系统",让百吨钢铁巨兽变成了能自主思考的智能机器。这就是矿山上的技术革命,也是未来交通的缩影。