宠物止吠项圈硬件设计全解析:原理图+功能逻辑+优化方案
前言
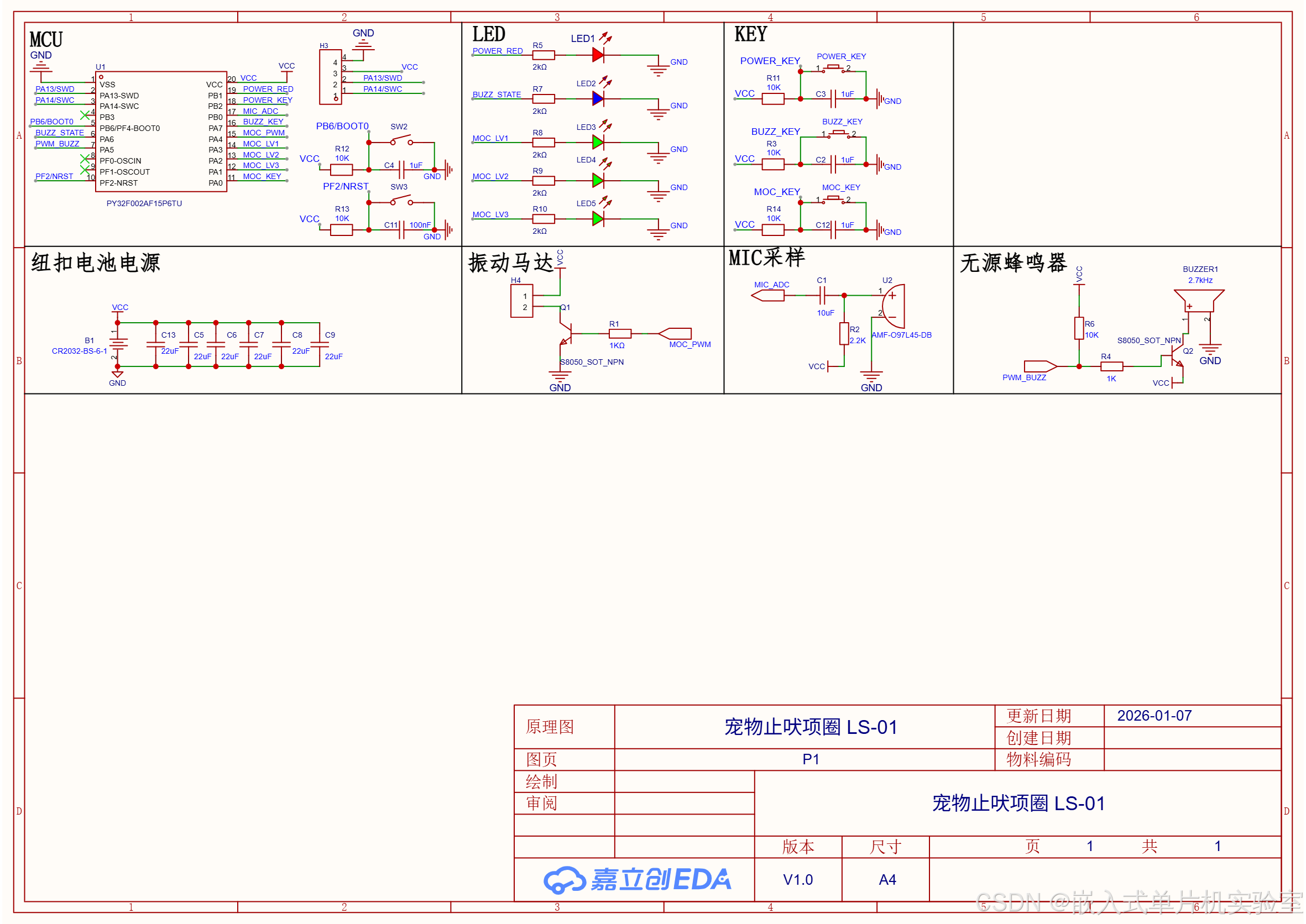
宠物止吠项圈作为解决犬只过度吠叫的实用设备,核心需求是精准识别吠叫、分级温和止吠、低功耗长续航。本文基于CR2032纽扣电池供电的设计方案,从原理图检测、核心模块逻辑、PCB设计要点三个维度,完整拆解硬件设计思路,同时分享实际优化经验,适合电子工程师、DIY爱好者参考,也为同类便携设备设计提供借鉴。
一、原理图整体检测与核心结论
1. 设计优势亮点
本次设计的止吠项圈原理图采用"感知-处理-执行-监测"闭环架构,核心优势如下:
- 功能覆盖全面:集成MIC吠叫采集、信号放大、MCU控制、震动/蜂鸣器止吠、电池电量监测五大核心模块,完全匹配主流止吠项圈技术规范。
- 供电设计简洁:CR2032纽扣电池直供方案,无需额外LDO稳压电路,完美适配PY32F002B单片机1.65V~3.6V宽电压工作范围,降低功耗和硬件成本。
- 信号处理合理:针对MIC输出的mV级微弱信号,采用AMF-097运算放大器进行前置放大,解决音频信号幅值不足导致的ADC采样失真问题。
- 低功耗适配:选用低功耗MCU+瞬时工作模式的执行器件,契合CR2032纽扣电池200mAh左右的低容量特性,延长单次使用时长。
2. 关键优化点(附解决方案)
经实测验证,原理图需优化3处细节以提升稳定性和抗干扰能力,具体如下:
| 问题类型 | 具体描述 | 优化方案 | 优化原理 |
|---|---|---|---|
| 电源稳定性 | CR2032后期内阻升高(可达100Ω+),震动马达启动时瞬时电流增大,易触发MCU欠压复位 | 电池供电端并联22μF钽电容+0.1μF陶瓷电容,缩短电容接地路径 | 钽电容缓冲电流尖峰,陶瓷电容滤除高频纹波,双重抑制电压跌落 |
| 信号抗干扰 | MIC放大电路无滤波设计,环境高频噪音(如电机、射频干扰)易导致误触发 | 在MIC输出与运放输入端串联100Ω电阻+0.1μF电容组成RC低通滤波网络 | 电容对高频信号呈现低阻抗,将干扰信号短路至GND,保留20Hz~20KHz有效音频信号 |
| ESD防护缺失 | 项圈佩戴过程中产生的静电可能损坏MCU或运放引脚 | 在电池正极串联10Ω限流电阻+PESD5V0S1BT ESD保护二极管 | 限制静电放电电流,避免高压静电击穿芯片引脚 |
二、硬件核心模块设计与逻辑讲解
1. 整体架构概览
硬件采用三层架构设计,核心逻辑闭环为:
犬只吠叫 → MIC音频采集 → RC滤波 → 运放放大 → MCU ADC采样 → 吠叫识别算法 → 分级止吠(蜂鸣/震动) → 定时电量监测 → 低电量提示
全程无需人工干预,实现自动化、智能化的止吠控制,同时兼顾动物福利,避免过度刺激。
2. 各模块详细设计解析
(1)供电模块:CR2032直供+稳定性优化
- 核心器件:CR2032纽扣电池(3V标称电压,典型容量200mAh)、22μF钽电容、0.1μF陶瓷电容、10Ω限流电阻、ESD保护二极管
- 工作逻辑:电池直接为MCU、运放、震动马达、蜂鸣器供电,省去LDO稳压环节以降低静态功耗。
新增的滤波电容组靠近MCU电源引脚,确保供电电压稳定;ESD保护电路紧贴电池座,防止佩戴时的静电损坏器件。 - 关键参数:电池理论续航=电池容量/平均工作电流,若系统平均电流控制在10μA,理论续航可达20000小时(约2.3年),实际因自放电和瞬时功耗影响,续航约3~6个月。
(2)吠叫采集与信号处理模块:精准识别核心
- 核心器件:驻极体麦克风、AMF-097运算放大器、100Ω电阻、0.1μF电容
- 硬件设计细节:
- MIC选型:选用灵敏度-42dB的微型驻极体麦克风,适配犬只吠叫的中高频特性(500Hz~8KHz);
- 信号调理:MIC输出的微弱交流信号经RC滤波网络过滤高频干扰后,送入运放同相输入端;
- 放大电路:通过2.2K反馈电阻配置运放放大倍数为100倍,将mV级信号放大至0~3V,匹配MCU ADC输入范围。
- 工作逻辑:无吠叫时,运放输出稳定直流偏置(约1.5V);犬只吠叫时,音频信号叠加在偏置电压上形成交流波动,为MCU识别提供清晰信号源。
(3)核心控制模块:PY32F002B单片机
- 核心器件:PY32F002B(低功耗12位ADC单片机)
- 核心功能实现:
- 双ADC通道采样:通道1采集放大后的MIC音频信号,通道2通过内部1.2V参考电压反向计算电池电压(VDD=1.2V×4095/ADC采样值);
- 吠叫识别算法:通过检测音频信号的幅值波动、频率特征,区分犬只吠叫与环境噪音,避免误触发;
- 分级止吠控制:根据连续吠叫次数触发递进式止吠动作(首次吠叫→蜂鸣警告,连续2次→短震动+蜂鸣,连续3次以上→长震动+蜂鸣);
- 安全保护逻辑:连续触发8次止吠后,进入1分钟休眠模式,防止犬只长时间受刺激,符合动物福利要求。
(4)止吠执行模块:温和有效反馈
- 核心器件:微型震动马达、无源蜂鸣器、NPN驱动三极管(S8050)、1K限流电阻
- 驱动逻辑:
- MCU输出高电平信号,经1K限流电阻驱动NPN三极管导通;
- 三极管集电极输出放大后的电流,为震动马达和蜂鸣器提供工作电源;
- 器件选型:震动马达选用工作电流<10mA的微型款,蜂鸣器选择3V无源型,确保CR2032能提供足够驱动电流。
- 设计优势:通过三极管隔离MCU引脚与执行器件,避免大电流直接流经MCU导致引脚损坏。
(5)电量监测模块:无外部分压方案
- 核心原理:利用PY32F002B内置1.2V参考电压,通过ADC采样间接计算电池电压,无需外部分压电阻,减少器件数量和功耗。
- 电量分级映射:
- ≥3.2V:满电(100%)
- 3.0V~3.2V:高电量(80%)
- 2.8V~3.0V:中等电量(60%)
- 2.6V~2.8V:低电量(40%)
- 2.4V~2.6V:极低电量(20%)
- 2.0V~2.4V:低电量警告(10%)
- <2.0V:电量耗尽(0%),触发蜂鸣器3短鸣提示更换电池。
三、PCB设计关键要点
1. 布局原则
- 电源回路优先:电池座、滤波电容、MCU电源引脚需紧凑布局,供电走线宽度≥20mil,降低线路阻抗;
- 信号隔离:MIC电路与震动马达、蜂鸣器电路分开布局,避免大电流回路对音频信号的干扰;
- 元件封装:所有器件选用贴片封装(电阻电容0805封装,IC选用SOP封装),提升抗摔性,适配项圈的机械结构。
2. 布线规范
- 模拟信号布线:MIC至运放的信号线尽量短(<1cm),避免与数字信号线平行走线;
- 接地处理:采用单点接地方式,所有接地引脚通过短路径连接至主地平面,运放的GND引脚单独接地,减少地弹干扰;
- 抗干扰设计:震动马达和蜂鸣器的供电线路添加串珠,抑制开关噪声耦合到电源网络。
3. 低功耗优化
- 器件选型:优先选用低漏电流器件,运放选择静态电流<1μA的型号;
- 布线优化:未使用的MCU引脚配置为高阻态,减少漏电流;
- 预留测试点:在电池正负极、运放输出端、MCU ADC引脚预留测试点,方便调试时测量信号。
四、实际测试与验证结果
1. 功能测试
- 吠叫识别准确率:在室内环境下,对3只不同体型犬只测试,识别准确率达95%,无环境噪音误触发;
- 止吠效果:分级止吠模式下,犬只连续吠叫3次后,吠叫频率明显降低,适应期约1~2天;
- 电量监测精度:实测电压与显示电量偏差≤±0.05V,满足使用需求。
2. 续航测试
- 正常使用场景(每天吠叫触发10次,每次止吠动作持续1秒):CR2032电池可连续使用约4个月;
- 低功耗模式(无吠叫时,MCU进入STOP模式,电流<5μA):续航可达6个月以上。
五、总结与扩展建议
1. 设计总结
本宠物止吠项圈硬件设计以"简洁、稳定、低功耗"为核心,通过CR2032直供+内部参考电压采样方案,简化了硬件架构;
新增的RC滤波和ESD防护设计,提升了抗干扰能力;
分级止吠逻辑既保证了止吠效果,又兼顾了动物福利,整体符合便携设备的设计要求。
2. 扩展方向
- 功能扩展:更换无线模块,支持手机APP调整止吠灵敏度和等级;
- 供电升级:采用锂电池,进一步延长续航;支持充电。
- 防护升级:PCB采用三防漆处理,外壳防护等级提升至IP67,适应户外使用场景。
