文章目录
环境准备
WSL
Windows下,必须采用wsl的方式。(也不排除直接使用windows版本ROS2的可能性,但不符合官网教程)
WSL必须是2.0的
ROS2
ROS2已安装成功
Isaac Sim
windows版Isaac Sim安装成功。
我是5.1版本
并启动软件:
.\isaac-sim.bat --/isaac/startup/ros_bridge_extension=isaacsim.ros2.bridge乌龟小车
场景里已经有一台可以被移动的乌龟小车

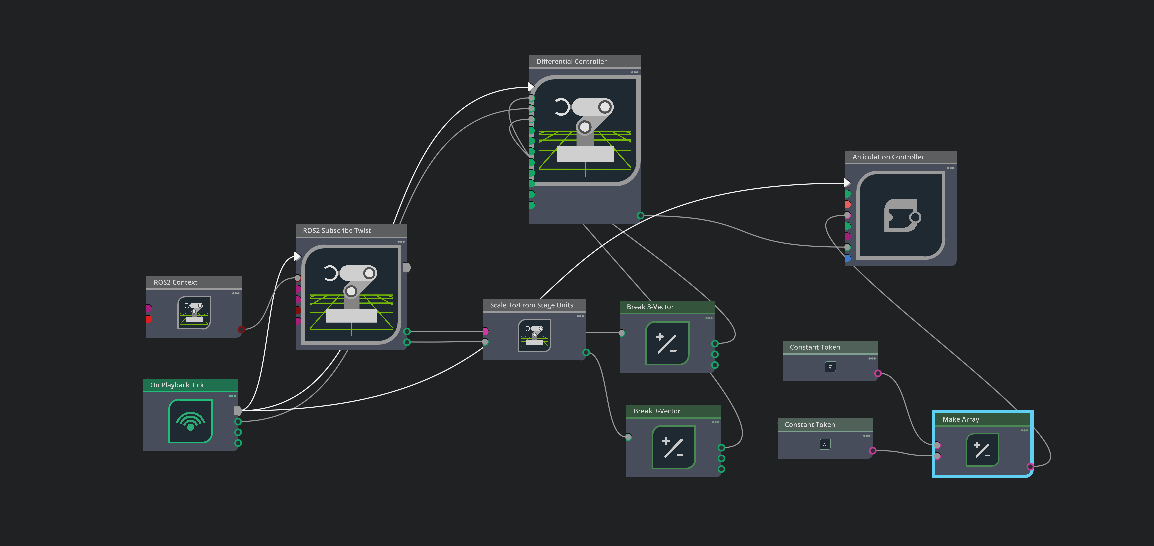
开始拖Action Graph
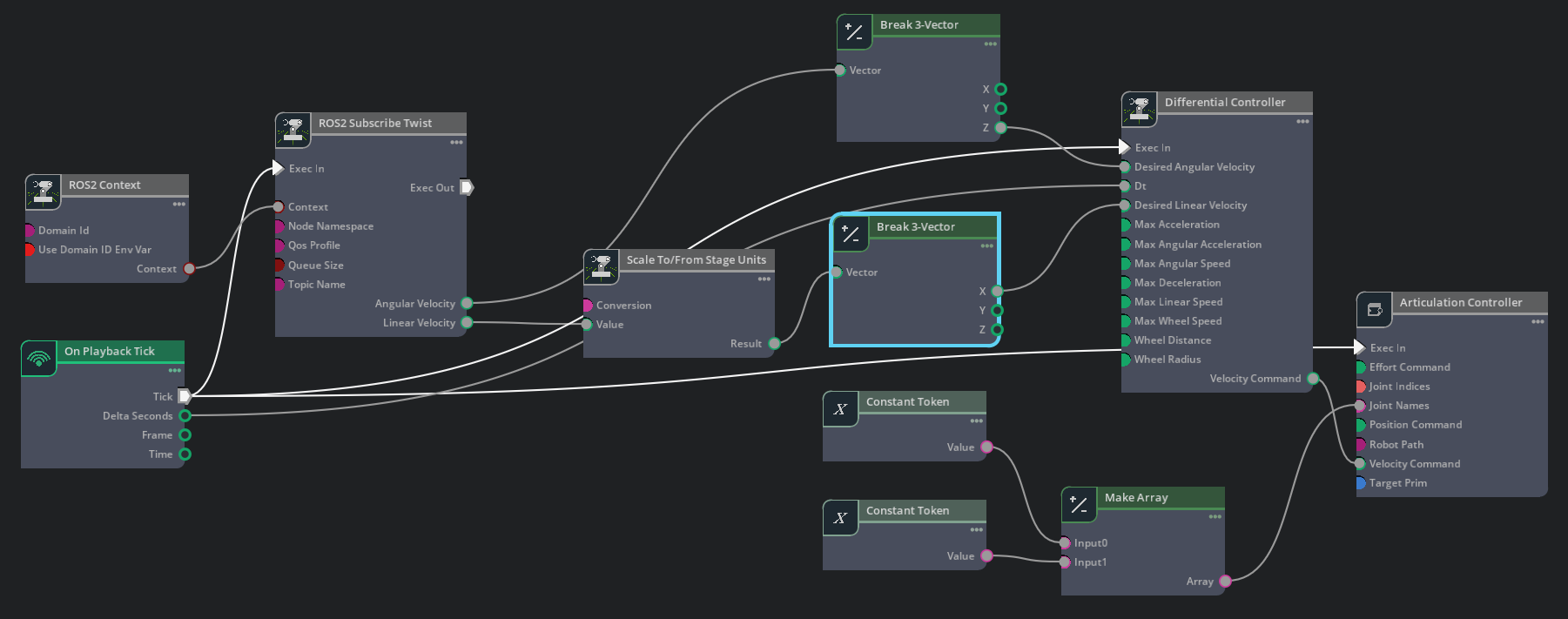
照着这个拖就行。不知道在哪儿的,直接搜,不用记。