随着国家政策的支持和市场需求的增长,以及建筑工人老龄化严重,智能建筑机器人因其高效性和实用性得以快速应用、为行业带来全新的生产力变革。

在这一进程中,稳定、强大且灵活的核心硬件至关重要。杰和科技IM1-707核心板,基于ARM平台高性能SMARC v2.1.1标准,搭载瑞芯微RK3588/J处理器,凭借强算力、丰富接口、强大视觉处理能力以及高度定制化特性,为建筑机器人设备提供更快响应、更稳性能的核心支撑,助力企业打造具备市场竞争力的智能机器人解决方案。
全自动建筑测量场景:高精度定位,毫秒级响应
建筑测量机器人在运作过程中,需要采用多种核心算法,确保高效、精确的测量任务执行。IM1-707核心板以8核CPU(4×Cortex-A76+4×Cortex-A55)和AI本地算力,能够高效处理复杂的测量任务和多任务操作。

内置6 TOPS NPU,针对INT8进行了深度优化,能够高效运行yolov8n等目标检测算法,单核速度达到59.6fps,满足机器人实时感知环境的需求。强大的神经网络算法加速能力,确保测量数据的高精度采集与实时处理。
室内喷涂应用场景:精准识别,灵活作业
室内喷涂机器人在建筑装修领域发挥着重要作用,通过机械臂实现墙面、天花板的精准喷涂,其灵活性直接影响施工效率和质量。
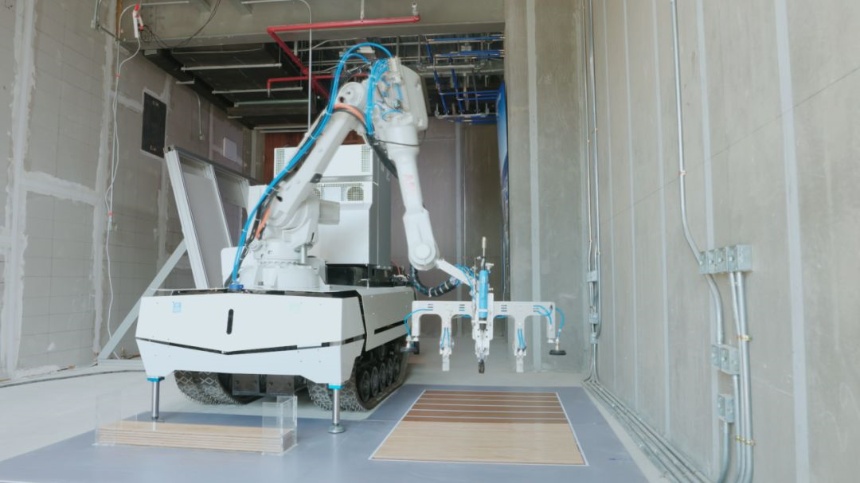
IM1-707核心板提供多个USB接口,可连接控制器和视觉识别设备,在喷涂作业中,机器人能够实时识别墙面边界、障碍物位置,并规划最优喷涂路径。多路串口与传感器接口,可保障机械臂与其他设备稳定通信和协同作业,确保喷涂过程的精准控制。同时,IM1-707支持多路摄像头接入,通过MIPI-CSI接口连接高清摄像头,实时采集喷涂效果图像,结合AI算法分析涂层均匀度、厚度等参数,实现喷涂质量的智能监控与闭环控制。
楼层清洁应用场景:自主导航,高效清洁
楼层清洁机器人承担地面清扫、吸尘、拖地等任务。IM1-707核心板为清洁机器人提供强大的计算能力和丰富的接口支持,实现智能化清洁作业。

在清洁作业中,机器人需要实时构建环境地图、规划清洁路径、识别障碍物和垃圾。IM1-707的8核CPU能够高效处理SLAM(同步定位与地图构建)算法,结合激光雷达、视觉传感器等多源数据,实现精准定位与导航。其丰富的I/O接口可连接电机驱动、传感器、通信模块等,构建完整的控制系统。同时,低功耗设计确保机器人具备更长的续航能力,满足大面积清洁需求。
从建筑测量的毫秒级响应,到墙面喷涂的灵活作业、再到自主导航清洁,核心板IM1-707凭借全面的产品规格与强大性能,在建筑机器人全场景应用中发挥着关键作用。作为ARM平台高性能SMARC v2.1.1核心板,它不仅为集成商和机器人制造商提供了稳定可靠的核心硬件平台,更支持客户基于低成本的定制化母板,快速构建适配不同场景的机器人主控系统,从而大幅缩短研发周期、降低开发成本、加快产品落地速度,助力企业在建筑智能化浪潮中抢占先机。
未来,随着智能制造的不断升级,IM1-707还将持续适配更多工业场景需求,为工业机器人的智能化转型注入更多动力。