前言
最近在研究 SimpleITK 的非刚性配准(B-Spline Registration),跟着官方教程跑代码,结果遇到了一系列让人摸不着头脑的现象:
-
Python 代码里明明没有
for循环,它是怎么跑完 3 层金字塔的? -
配准明明成功了,为什么损失函数(Metric)曲线最后反而升高了?
-
最离谱的是:用更高级的"多分辨率动态网格"策略,结果反而比"傻瓜式固定网格"差得十万八千里(TRE 误差爆炸)?
经过一番深度排查和计算,终于破案了。这篇文章将带你一层层剥开 SimpleITK 抽象 API 的外衣,并揭示一个隐藏在小学数学里的"致命陷阱"。
一、 那个"看不见"的循环:SimpleITK 的封装艺术
在配置多分辨率配准时,核心代码只有这几行:
Python
# 设定 3 层金字塔,缩放因子分别为 1倍、2倍、4倍
registration_method.SetInitialTransformAsBSpline(
initial_transform, inPlace=True, scaleFactors=[1, 2, 4]
)
registration_method.SetShrinkFactorsPerLevel(shrinkFactors=[4, 2, 1])疑问: 代码里完全没有 for 循环,它是怎么实现"先跑第1层,把结果传给第2层,再跑第3层"的?
解析:
这正是 SimpleITK(以及底层 ITK)的设计哲学------声明式编程。
-
我们写的 Python 代码只是在**"填菜单"**(设置参数),并没有真正执行。
-
真正的
for循环和逻辑控制被封装在 C++ 底层。 -
当你调用
registration_method.Execute()时,底层的 C++ 引擎会读取你的scaleFactors清单,自动完成以下"接力赛":-
Level 1:用稀疏网格跑配准 -> 得到参数。
-
Upsample:C++ 自动把网格分裂变密(自动计算新坐标)。
-
Level 2:继承上一层的参数作为起点,继续优化。
-
...以此类推。
-
感悟: 不要试图在 Python 层去找循环,把参数设好,剩下的交给 C++ 黑盒。
二、 怎么才算配准好了?Dice 系数详解
配准完之后,我们怎么评价效果?除了看重叠图,最硬的指标就是 Dice 系数 (Dice Coefficient)。
1. 什么是 Dice?
简单来说,就是**"重叠度打分"**。
-
1.0 (满分):两个肺部 Mask 完美重合。
-
0.0 (零分):完全不沾边。
2. 代码实现
SimpleITK 提供了现成的工具类,注意看这段代码的细节:
Python
# 关键点:对 Label 变形时,必须用 NearestNeighbor (最近邻插值)
transformed_labels = sitk.Resample(
masks[moving], fixed_image, tx,
sitk.sitkNearestNeighbor, 0.0, masks[moving].GetPixelID()
)
# 计算 Dice
label_overlap = sitk.LabelOverlapMeasuresImageFilter()
label_overlap.Execute(ground_truth, transformed_labels)
print(f"Dice: {label_overlap.GetDiceCoefficient()}")避坑指南:
在 Resample 标签图时,千万不要用线性插值(Linear) !否则整数标签(如 1=肺, 3=骨头)会被平均成小数(1+3=2),凭空变出不存在的组织。必须用 sitkNearestNeighbor。
三、 诡异现象:为什么 Metric 不降反升?
在查看配准过程的 Metric(损失函数)曲线时,我发现了一个奇怪的现象:
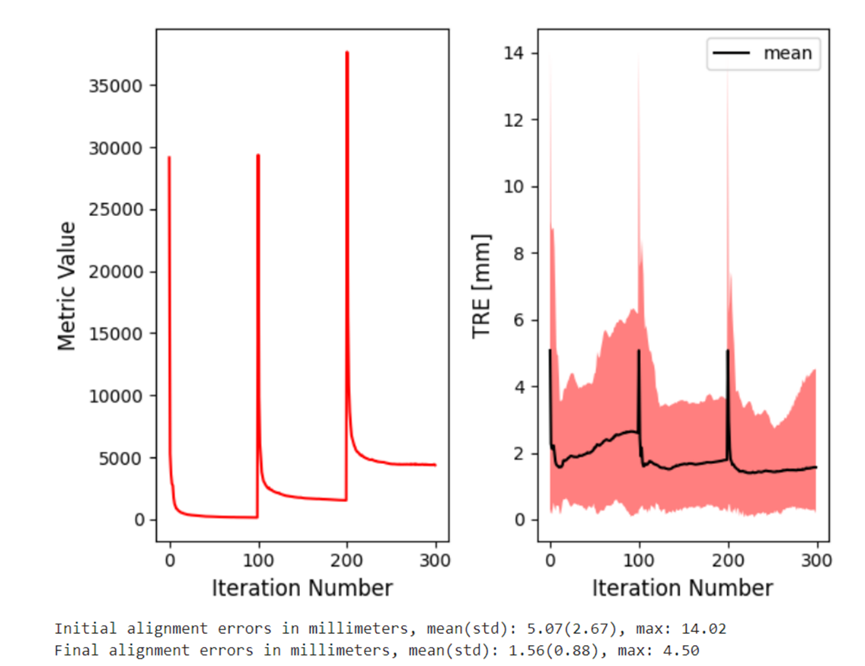
现象: 在第 200 次迭代(进入最后阶段)时,Metric 值突然从几千飙升到了几万,而且一直维持在高位,看起来比一开始还差。
原因分析:这是"考试难度"变了。
这对应了代码中的 SetShrinkFactorsPerLevel(shrinkFactors=[4, 2, 1]):
-
前两阶段:图像被缩小了(模糊了)。像素之间的灰度差异很小,MeanSquares(均方差)天然就低。
-
最后阶段 :突然切换回原始分辨率(高清原图)。高清图里包含了所有的血管纹理、噪点和伪影,像素方差剧增。
结论: Metric 升高是因为它在计算高清图的差异,而不是配准变差了。不同分辨率层级之间的 Metric 绝对值没有可比性。
四、 终极破案:为什么更高级的方法反而"爆炸"了?
这是本文最核心的部分。
1. 案发现场
我对比了两组实验结果:
-
左图(Baseline):使用固定网格(间距 50mm),网格大小从头到尾不变。
- 结果:TRE(真实误差)很低,方差很小,效果稳健。
-
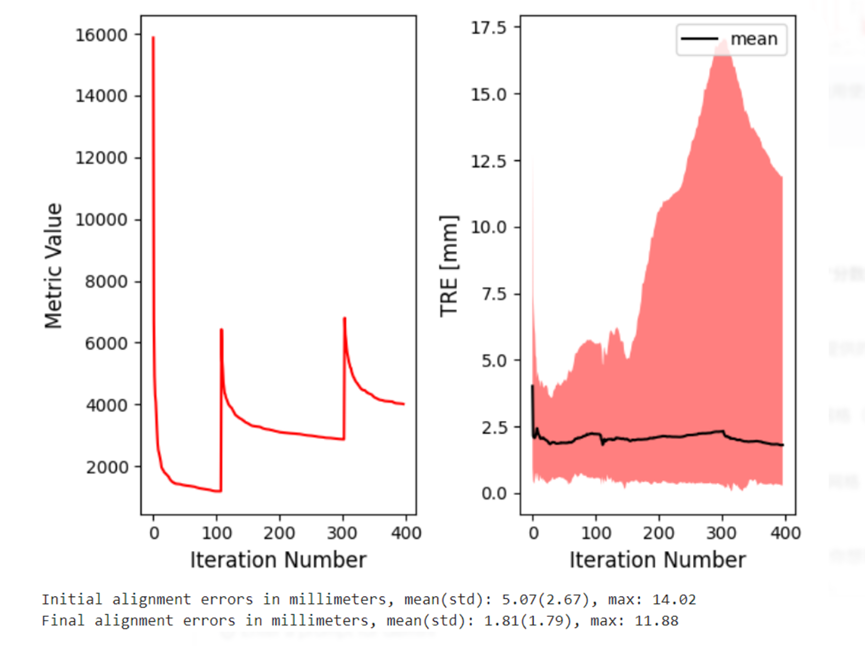
右图(Advanced):使用多分辨率网格(动态加密),最后阶段理论上应该更精细。
- 结果 :TRE 直接爆炸,红色阴影(误差范围)巨大。过拟合了!
2. 为什么会过拟合?
-
左图 :网格一直很稀疏(粗)。就像用大刷子刷墙,想抠细节也抠不出来,"由于分辨率低而被迫正则化",反而不容易出事。
-
右图:最后阶段网格变密了。配合激进的优化器(LBFGS2),为了强行匹配高清图里的噪点,把网格扭曲成了麻花(Topology Breaking),导致解剖结构错乱。
3. 数学实锤:被"四舍五入"骗了!
我原本以为:"右图先除以4,最后再乘以4,最后一层的网格密度应该和左图一样啊?"
大错特错!让我们算一笔账:
假设图像尺寸对应 50mm 间距大概需要 10个 格子。
-
左图(老实人算法):
直接计算:
10个控制点。N_{left} = 10
-
右图(多分辨率算法):
-
先做除法(制造种子):10 / 4 = 2.5。
- 注意:程序里有
int()取整!变成了 3。
- 注意:程序里有
-
再做乘法(最终层级):3 \\times 4 = 12。
N_{right} = 12
-
惊人发现:
10 vs 12。在三维空间里,控制点数量是立方的关系:
-
左图参数量:10\^3 = 1000
-
右图参数量:12\^3 = 1728
真相大白:
由于整数取整的误差,右图最终的网格密度比左图高了将近一倍!
参数多了一倍 + 没有加正则化惩罚项 + 激进的优化器 = 必然的过拟合与结果爆炸。
五、 总结
这次踩坑让我明白了 SimpleITK 配准的三个真理:
-
API 虽抽象,逻辑在心中:理解 C++ 底层的多分辨率接力机制,才能看懂参数。
-
Metric 只是参考:跨分辨率比较 Metric 毫无意义,要相信 Dice 和 TRE。
-
小心"整形"陷阱 :在多分辨率策略中,
int(N/4)*4永远不等于N。这微小的差别,可能就是模型过拟合的罪魁祸首。
解决建议: 如果想用多分辨率网格,务必加上 BSplineTransformRegularization(正则化惩罚项),给你的优化器装上刹车!