操作流程
- 一、在钉钉内部群聊中点击右上角的齿轮图标
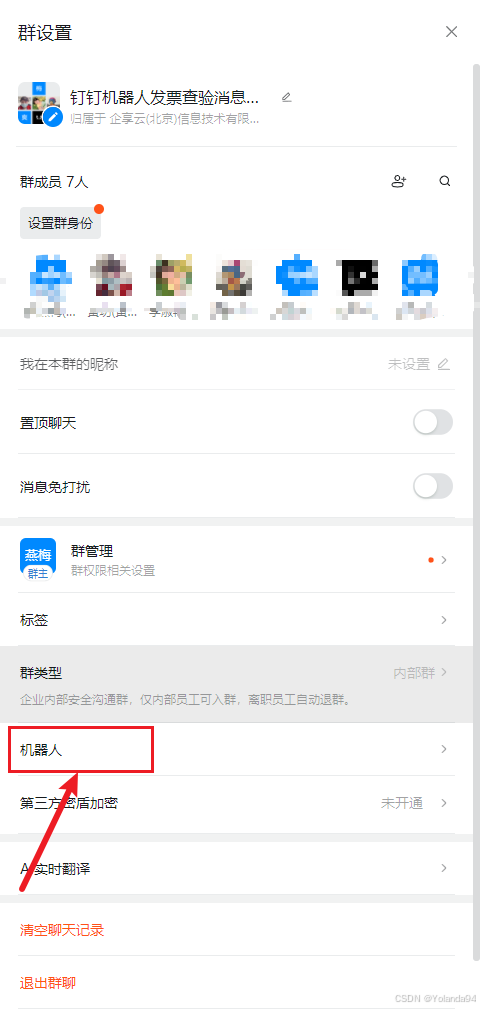
- 二、在弹出的右侧弹框中选择"机器人"
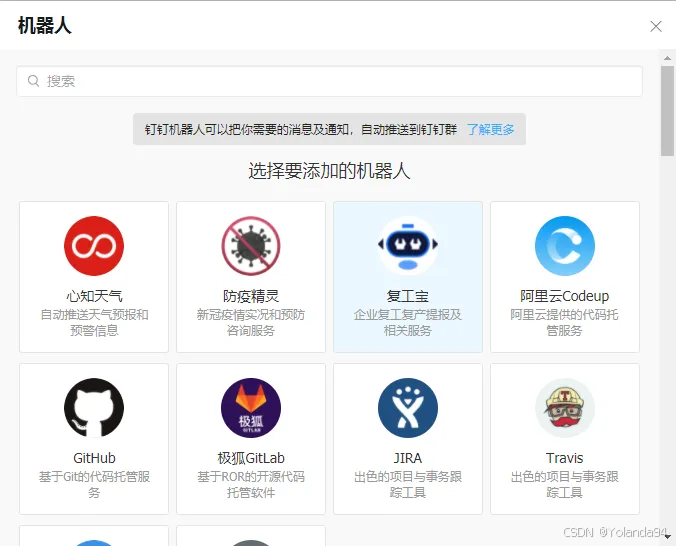
- 三、在机器人管理页面选择"添加机器人"
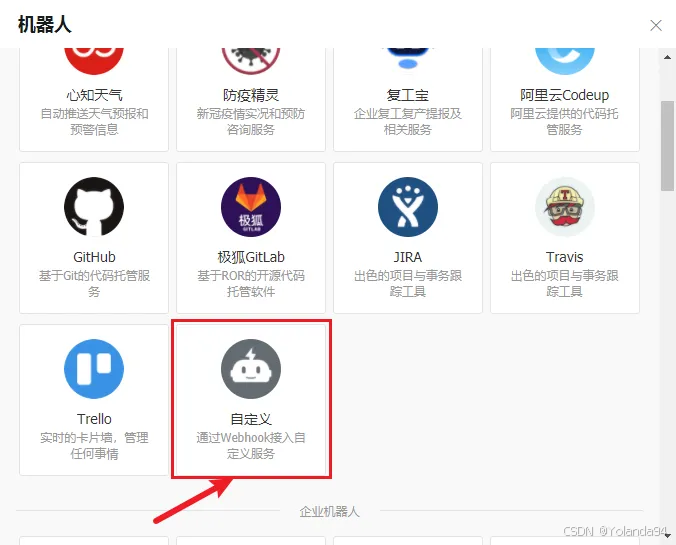
- 四、在弹出的机器人弹框里选择"自定义"
- 五、点击机器人详情弹框的"添加"按钮
- 六、根据自己的需求添加自定义机器人
- 七、添加完成后在弹出的弹框中点击"Webhook"后的"复制"按钮,将生成的机器人url复制下来
- 附录:
一、在钉钉内部群聊中点击右上角的齿轮图标

二、在弹出的右侧弹框中选择"机器人"
三、在机器人管理页面选择"添加机器人"


四、在弹出的机器人弹框里选择"自定义"
五、点击机器人详情弹框的"添加"按钮


六、根据自己的需求添加自定义机器人



七、添加完成后在弹出的弹框中点击"Webhook"后的"复制"按钮,将生成的机器人url复制下来


最后就能在群里看到新添加的自定义机器人了
