autoware 使用 waypoint loader重规划路径
🔹 航点预处理模式
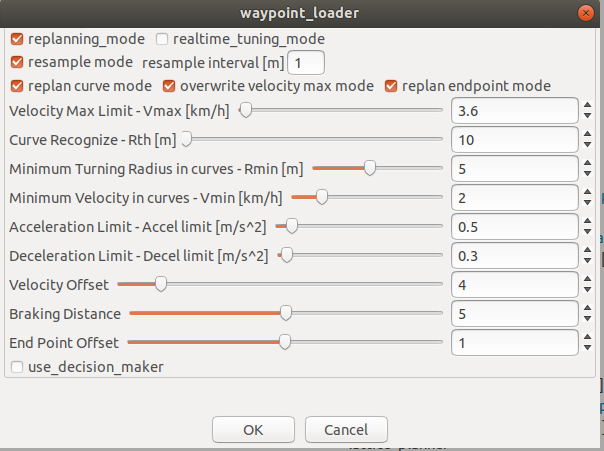
- **
replanning_mode**在加载航点文件时,对原始路径进行离线重规划与优化,生成更平滑、更符合车辆运动约束的轨迹。 - **
resample mode+resample interval [m]**对原始航点按设定间隔(当前 1m)插值重采样,让航点分布更均匀,行驶轨迹更平滑。 - **
replan curve mode**对弯道区域的航点做局部重规划,确保转弯半径满足车辆最小转弯半径限制。 - **
overwrite velocity max mode**强制用界面设置的最大速度,覆盖原始航点文件中的速度值,实现统一限速。 - **
replan endpoint mode**对终点附近的航点进行优化,调整减速策略,提升终点停靠的精准度。
🔹 运动学约束
- **
Velocity Max Limit - Vmax [km/h]**车辆行驶的最高允许速度(当前 3.6 km/h)。 - **
Curve Recognize - Rth [m]**弯道识别阈值(当前 10m),当道路曲率半径小于此值时判定为弯道。 - **
Minimum Turning Radius in curves - Rmin [m]**弯道行驶时允许的最小转弯半径(当前 5m),防止转向过度。 - **
Minimum Velocity in curves - Vmin [km/h]**弯道行驶的最低速度限制(当前 2 km/h),避免车辆在弯道停滞。 - **
Acceleration Limit - Accel limit [m/s²]**最大允许加速度(当前 0.5 m/s²),保证加速平稳。 - **
Deceleration Limit - Decel limit [m/s²]**最大允许减速度(当前 0.3 m/s²),避免急刹车。
🔹 偏移与制动
Velocity Offset在原始航点速度基础上的补偿值(当前 4),用于统一调整整体速度。实际速度 = 原始航点速度 + Velocity Offset ,偏移后的速度不会超过你在Velocity Max Limit里设置的最大值- **
Braking Distance**车辆从当前速度减速到停止所需的距离(当前 5m),用于提前触发制动。 - **
End Point Offset**车辆到达终点时允许的位置误差范围(当前 1m),平衡停靠精度与稳定性。
🔹 功能开关
- **
use_decision_maker**联动 Autoware 的决策模块,让车辆可根据环境(如红绿灯、障碍)动态调整行驶策略。 - **
realtime_tuning_mode**实时调参模式(未勾选),开启后可在运行中动态修改参数。