142-西门子S7-1200机器人码垛机程序和1200立体库及码垛机等三个程序案例,程序带注释 ,程序结构清楚明了,注释齐全。 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。
凌晨三点的工厂车间里,西门子S7-1200PLC的绿色运行指示灯规律闪烁,机械臂正抓着最后一箱货物稳稳落在托盘上。这套码垛系统刚完成72小时连续运行测试,操作工老张叼着烟在触摸屏上翻看运行日志:"这PLC程序写得比之前外包的强,注释跟说明书似的,连我这半路出家的都能看懂个七七八八。"
确实,好的工业自动化程序就像车间老师傅的手艺活儿------既要有实用主义的筋骨,又得藏着工程师的巧思。今天咱们就拆解几个真实的1200程序案例,看看怎么把变频器、机器人、视觉这些硬核设备玩出花来。
码垛机主程序结构像搭积木
142-西门子S7-1200机器人码垛机程序和1200立体库及码垛机等三个程序案例,程序带注释 ,程序结构清楚明了,注释齐全。 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。

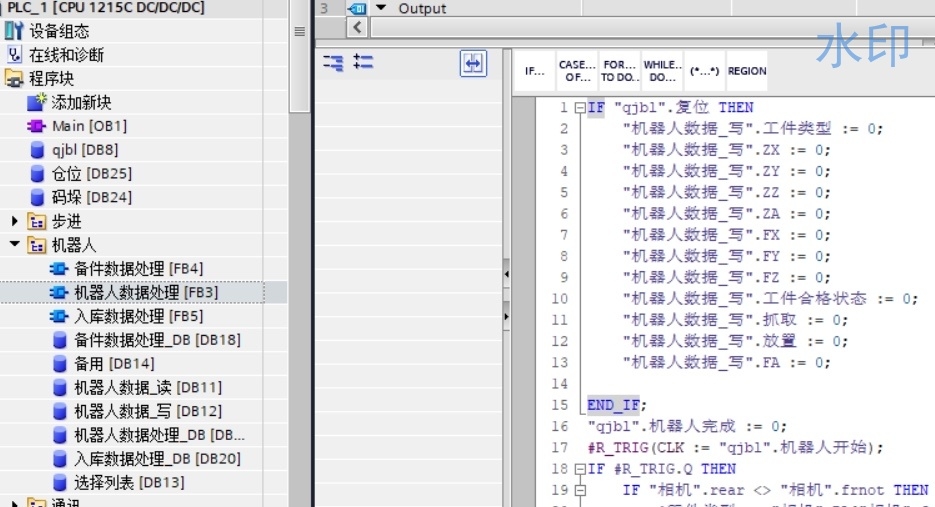
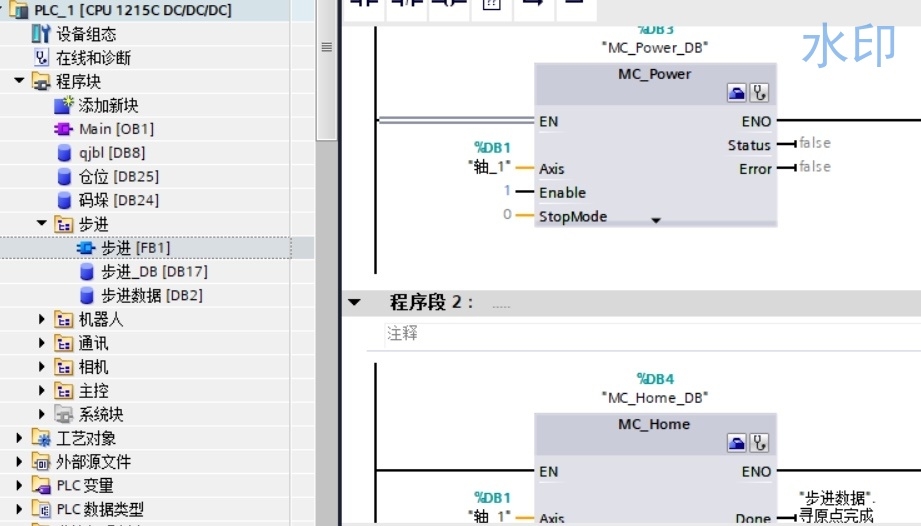
主程序OB1里几个关键块一摆,整个控制逻辑就立起来了:
scl
// OB1主循环
#机器人控制块.DO(); // 机械臂运动控制
#输送带控制(); // 变频器启停调速
#视觉定位FB(); // 调用视觉处理功能块
#托盘计数 := 统计完成数(); // 实时更新产量每个功能块内部都藏着"俄罗斯套娃"式的子程序。比如视觉定位功能块里,用SCL写的坐标转换算法比梯形图清爽多了:
scl
FUNCTION_BLOCK 视觉定位
VAR_INPUT
相机数据: ARRAY[1..4] OF REAL;
END_VAR
VAR_OUTPUT
机械坐标: POSITION;
END_VAR
// 坐标转换算法(仿射变换)
机械坐标.X := 相机数据[1]*0.85 + 相机数据[2]*0.15;
机械坐标.Y := SQRT(相机数据[3]^2 + 相机数据[4]^2);
// 补偿机械臂安装角度偏差...Modbus TCP通讯配置像对暗号
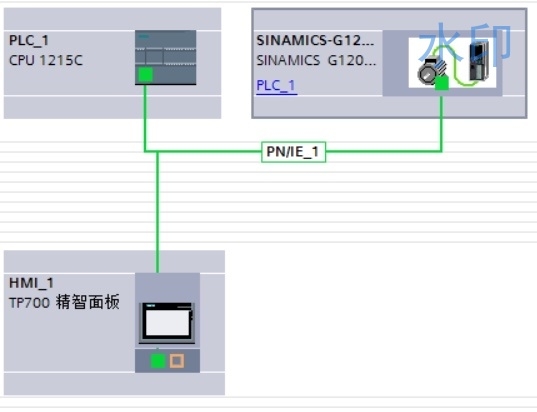
立体库和码垛机之间玩的是Modbus TCP通讯,博图里配置通讯就像给设备发身份证:
scl
// 通讯参数配置
#ModbusClient.CONNECT(
IP_Address := '192.168.1.20',
Timeout := T#2S,
Port := 502);
// 读写保持寄存器
IF #握手信号 THEN
#读取堆垛机状态 := MB_READ_HOLD_REGISTER(Start:=40001, Quantity:=5);
// 处理仓位数据...SCL编程比梯形图更带劲的地方
当遇到复杂的物料调度逻辑时,SCL的条件判断明显更利索:
scl
CASE #当前仓位 OF
1 TO 10: // A区处理逻辑
#机械手速度 := 80;
IF #紧急停止 = FALSE THEN
执行取货动作();
END_IF;
11 TO 20: // B区特殊处理
FOR #i := 1 TO 3 DO
震动清灰(); // 防止粉尘堆积
END_FOR;
ELSE // 异常处理
报警日志记录(代码:=16#8001);
END_CASE;这些程序里最值钱的其实是注释里的"黑话"------比如某个延时参数标注着"老刘说至少要1.5秒,别改!",某个急停逻辑旁写着"王工要求的双确认机制"。这些带着现场经验的注释,比教科书上的理论更接地气。
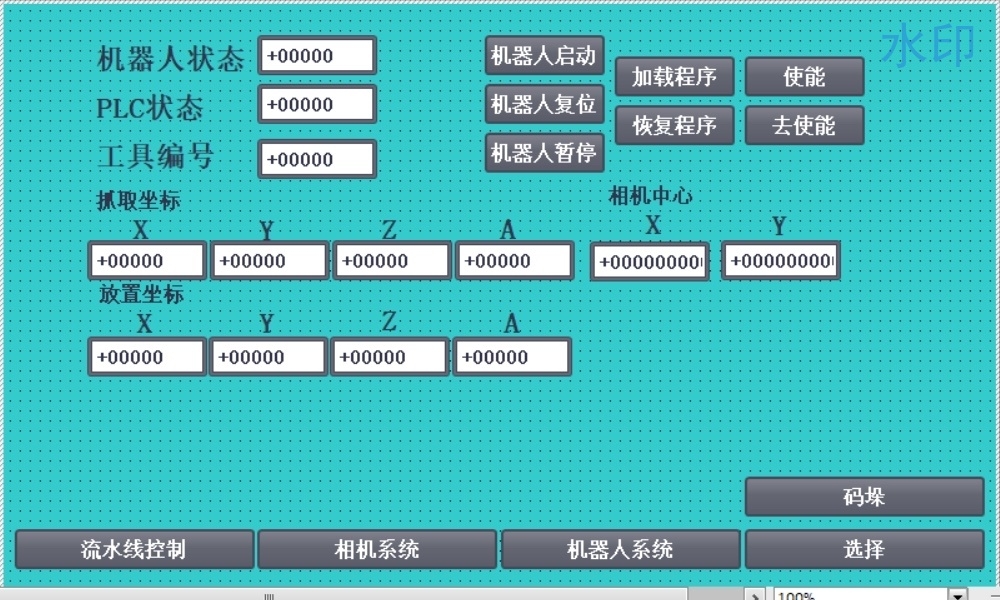
看着触摸屏上跳动的实时数据,突然觉得PLC程序就像现代版的鲁班锁------每个变量都是精心打磨的榫卯,在工业物联网的时代里,继续演绎着机械与代码的古老默契。