# -*- coding: utf-8 -*-
import pyrealsense2 as rs
import numpy as np
import cv2
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchvision import models, transforms
import urx
import time
import sys
from scipy.spatial.transform import Rotation as R
import open3d as o3d # 点云可视化核心库
import matplotlib.pyplot as plt
# ======================== 1. 个性化参数配置(必须修改!)========================
# 手眼标定矩阵(相机→UR5基坐标系,替换为你的标定结果)
EYE_IN_HAND_MATRIX = np.array([
[0.04422573, -0.14504633, 0.98802194, 0.00212291],
[-0.99891311, -0.00093512, 0.04656854, 0.10114924],
[0.00255313, -0.98941564, -0.14480217, 0.01464284],
[0.0, 0.0, 0.0, 1.0]
])
# UR5机械臂配置
UR5_IP = "192.168.56.100" # 替换为你的UR5 IP地址
SAFE_HEIGHT = 0.15 # 抓取安全高度(距桌面,单位:米)
MOVE_ACC = 0.1 # 运动加速度
MOVE_VEL = 0.1 # 运动速度
# Robotiq夹爪配置(数字输出端口,根据实际接线修改)
GRIPPER_PORT = 0 # 夹爪控制的数字输出端口
GRIPPER_OPEN_VAL = 255 # 夹爪全开值
GRIPPER_CLOSE_VAL = 0 # 夹爪全闭值
GRIPPER_DELAY = 2 # 夹爪开合等待时间(秒)
# Realsense相机内参(替换为你的相机标定内参)
CAM_FX = 614.543 # 焦距x
CAM_FY = 614.178 # 焦距y
CAM_CX = 314.967 # 光心x
CAM_CY = 245.923 # 光心y
# GraspNet配置
CONFIDENCE_THRESHOLD = 0.1 # 置信度阈值(可调)
GRASP_WIDTH = 0.085 # 抓取宽度(米)
GRASP_DEPTH = 0.04 # 抓取深度(米)
PRETRAINED_WEIGHTS_PATH = "graspnet_pretrained.pth" # 预训练权重路径
NEIGHBOR_SIZE = 3 # 深度采样邻域大小(3×3)
POINT_CLOUD_THRESHOLD = 10 # 点云邻域验证阈值(最少点数)
# ======================== 2. CPU版GraspNet模型(无GPU依赖)========================
class GraspNetCPU(nn.Module):
def __init__(self, num_angle=12, num_width=16):
super(GraspNetCPU, self).__init__()
# 骨干网络:ResNet50(加载预训练权重)
self.backbone = models.resnet50(weights=models.ResNet50_Weights.DEFAULT)
self.backbone = nn.Sequential(*list(self.backbone.children())[:-2])
# 关键点分支(预测抓取点置信度)
self.key_point_head = nn.Sequential(
nn.Conv2d(2048, 512, kernel_size=1),
nn.ReLU(inplace=True),
nn.Conv2d(512, 1, kernel_size=1),
nn.Sigmoid()
)
# 姿态分支(预测角度+宽度)
self.pose_head = nn.Sequential(
nn.Conv2d(2048, 512, kernel_size=1),
nn.ReLU(inplace=True),
nn.Conv2d(512, num_angle + num_width, kernel_size=1)
)
self.num_angle = num_angle
self.num_width = num_width
self.device = torch.device("cpu")
self.to(self.device)
self.eval() # 固定为推理模式
def forward(self, x):
features = self.backbone(x)
grasp_confidence = self.key_point_head(features)
pose_pred = self.pose_head(features)
angle_pred = pose_pred[:, :self.num_angle, :, :]
width_pred = pose_pred[:, self.num_angle:, :, :]
angle_prob = F.softmax(angle_pred, dim=1)
return {
"grasp_confidence": grasp_confidence,
"angle_prob": angle_prob,
"width_pred": width_pred
}
def load_pretrained_weights(self, weight_path):
"""加载预训练权重"""
try:
checkpoint = torch.load(weight_path, map_location=self.device)
if "model_state_dict" in checkpoint:
self.load_state_dict(checkpoint["model_state_dict"], strict=False)
else:
self.load_state_dict(checkpoint, strict=False)
print(f"✅ 成功加载预训练权重:{weight_path}")
except FileNotFoundError:
print(f"⚠️ 未找到预训练权重 {weight_path},使用随机初始化权重")
except Exception as e:
print(f"⚠️ 加载权重失败:{e},使用随机初始化权重")
# ======================== 3. Realsense D415图像+点云采集 ========================
def capture_realsense_data():
"""采集RGB-D图像、深度缩放因子和点云(修复返回值+重试机制)"""
# 初始化Realsense管道
pipeline = rs.pipeline()
config = rs.config()
# 强制使用相机支持的分辨率/帧率
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
# 启动流(增加异常处理)
try:
profile = pipeline.start(config)
except rs.error as e:
print(f"❌ Realsense启动失败:{e}")
print("💡 建议检查:1.相机是否连接 2.USB接口是否为3.0 3.是否被其他程序占用")
pipeline.stop()
sys.exit(1)
# 获取深度缩放因子
depth_sensor = profile.get_device().first_depth_sensor()
depth_scale = depth_sensor.get_depth_scale()
# 配置点云生成器
pc = rs.pointcloud()
points = rs.points()
align = rs.align(rs.stream.color)
# 增加帧获取重试机制(最多重试10次)
color_frame = None
depth_frame = None
retry_count = 0
max_retry = 10
while retry_count < max_retry:
try:
# 设置超时时间(5000ms)
frames = pipeline.wait_for_frames(timeout_ms=5000)
aligned_frames = align.process(frames)
color_frame = aligned_frames.get_color_frame()
depth_frame = aligned_frames.get_depth_frame()
if color_frame and depth_frame:
break # 成功获取帧,退出重试
else:
retry_count += 1
print(f"⚠️ 第{retry_count}次重试获取帧(未获取到有效帧)")
time.sleep(0.5)
except rs.error as e:
retry_count += 1
print(f"⚠️ 第{retry_count}次重试获取帧(错误:{e})")
time.sleep(0.5)
# 最终检查帧是否有效
if not color_frame or not depth_frame:
print("❌ 多次重试后仍未获取到相机帧,退出程序")
pipeline.stop()
sys.exit(1)
# 转换为numpy数组
color_img = np.asanyarray(color_frame.get_data())
depth_img = np.asanyarray(depth_frame.get_data())
# 生成点云(关键补充:返回pcd)
points = pc.calculate(depth_frame)
vtx = np.asanyarray(points.get_vertices()).view(np.float32).reshape(-1, 3) # (N,3) 相机坐标系点云
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(vtx)
# 给点云上色
color_data = np.asanyarray(color_frame.get_data()).reshape(-1, 3) / 255.0
pcd.colors = o3d.utility.Vector3dVector(color_data)
# 停止管道
pipeline.stop()
return color_img, depth_img, depth_scale, pcd # 返回4个值,匹配调用
# ======================== 4. 辅助函数:手眼矩阵验证 ========================
def validate_hand_eye_matrix():
"""验证手眼矩阵精度(可选:替换为实际标定点)"""
# 假设标定板中心在相机坐标系的已知位置(需根据实际场景修改)
cam_calib = np.array([0.1, 0.0, 0.5, 1.0])
base_calib = EYE_IN_HAND_MATRIX @ cam_calib
print(f"\n📌 手眼矩阵验证:")
print(f" 相机坐标系标定点:{cam_calib[:3]} m")
print(f" 转换后基坐标系点:{base_calib[:3]} m")
print(f" 💡 若偏差>0.01m,请重新标定手眼矩阵")
# ======================== 4. 抓取位姿检测与转换 ========================
def detect_and_convert_grasp_pose(color_img, depth_img, depth_scale, model, pcd):
"""检测抓取位姿并转换到UR5基坐标系(优化深度采样+点云验证)"""
# 图像预处理(增强对比度)
class EnhanceContrast:
def __call__(self, img):
from PIL import ImageEnhance
enhancer = ImageEnhance.Contrast(img)
return enhancer.enhance(1.5)
transform = transforms.Compose([
transforms.ToPILImage(),
EnhanceContrast(),
transforms.Resize((480, 640)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
input_tensor = transform(color_img).unsqueeze(0).to(model.device)
# CPU推理(关闭梯度)
with torch.no_grad():
output = model(input_tensor)
# 解析检测结果
conf_map = output["grasp_confidence"].squeeze().cpu().numpy()
angle_prob = output["angle_prob"].squeeze().cpu().numpy()
# 优化:置信度图上采样,减少像素还原误差
conf_map_upsampled = cv2.resize(conf_map, (640, 480), interpolation=cv2.INTER_CUBIC)
# 找置信度最高的抓取点(支持次优选择)
def get_best_grasp_point(conf_map_input, skip_idx=None):
conf_flat = conf_map_input.flatten()
if skip_idx is not None:
conf_flat[skip_idx] = 0 # 屏蔽已选点
max_conf = np.max(conf_flat)
max_conf_idx = np.unravel_index(np.argmax(conf_flat), conf_map_input.shape)
return max_conf, max_conf_idx, conf_flat
max_conf, max_conf_idx, conf_flat = get_best_grasp_point(conf_map)
grasp_h, grasp_w = max_conf_idx
skip_index = None
# 检查置信度
if max_conf < CONFIDENCE_THRESHOLD:
print(f"⚠️ 最高置信度 {max_conf:.3f} 低于阈值 {CONFIDENCE_THRESHOLD},强制使用该点")
while True:
# 优化:浮点还原像素坐标(避免整数误差)
grasp_x_px = grasp_w * 32.0
grasp_y_px = grasp_h * 32.0
# 边界裁剪
grasp_x_px = np.clip(grasp_x_px, 0, depth_img.shape[1]-1)
grasp_y_px = np.clip(grasp_y_px, 0, depth_img.shape[0]-1)
# 优化1:邻域均值滤波采样深度(替换单像素)
grasp_y_int = int(grasp_y_px)
grasp_x_int = int(grasp_x_px)
# 计算邻域范围
half_neighbor = NEIGHBOR_SIZE // 2
y_min = max(0, grasp_y_int - half_neighbor)
y_max = min(depth_img.shape[0]-1, grasp_y_int + half_neighbor)
x_min = max(0, grasp_x_int - half_neighbor)
x_max = min(depth_img.shape[1]-1, grasp_x_int + half_neighbor)
# 提取邻域有效深度
neighbor_depth = depth_img[y_min:y_max+1, x_min:x_max+1]
valid_depth = neighbor_depth[neighbor_depth > 0] # 过滤Realsense无效深度(0值)
# 统计场景有效深度中位数(替代固定默认值)
valid_depth_all = depth_img[depth_img > 0] * depth_scale
if len(valid_depth_all) == 0:
print("❌ 无有效深度值,退出")
sys.exit(1)
depth_median = np.median(valid_depth_all)
# 确定深度值
if len(valid_depth) == 0:
print(f"❌ 抓取点邻域无有效深度,使用场景中位数 {depth_median:.3f}m")
depth_value = depth_median
else:
depth_value = np.mean(valid_depth) * depth_scale
# 优化2:深度过滤(用场景中位数替代固定0.2m)
if depth_value < 0.01 or depth_value > 3.0:
print(f"❌ 无效深度值:{depth_value:.3f}m,使用场景中位数 {depth_median:.3f}m")
depth_value = depth_median
# 像素坐标→相机坐标系
cam_x = (grasp_x_px - CAM_CX) * depth_value / CAM_FX
cam_y = (grasp_y_px - CAM_CY) * depth_value / CAM_FY
cam_z = depth_value
# 优化3:点云邻域验证(避免飘到无点云区域)
pcd_points = np.asarray(pcd.points)
distances = np.linalg.norm(pcd_points - [cam_x, cam_y, cam_z], axis=1)
near_points = distances[distances < 0.01] # 0.01m范围内点云数量
if len(near_points) >= POINT_CLOUD_THRESHOLD:
# 点云验证通过,退出循环
break
else:
# 点云验证失败,选择次优置信度点
print(f"⚠️ 抓取点周围无足够点云(仅{len(near_points)}个),切换次优置信度点")
if skip_index is None:
skip_index = np.argmax(conf_flat)
else:
conf_flat[skip_index] = 0
skip_index = np.argmax(conf_flat)
# 获取次优点
max_conf, max_conf_idx, _ = get_best_grasp_point(conf_map, skip_index)
grasp_h, grasp_w = max_conf_idx
# 防止无限循环
if max_conf < CONFIDENCE_THRESHOLD / 2:
print("❌ 无有效抓取点,退出")
sys.exit(1)
# 解析抓取角度(0-180°)
angle_idx = np.argmax(angle_prob[:, grasp_h, grasp_w])
grasp_angle = angle_idx * 15 # 12类→每类15°
# 相机坐标系→UR5基坐标系(手眼标定转换)
cam_pose = np.array([cam_x, cam_y, cam_z, 1.0])
base_pose = EYE_IN_HAND_MATRIX @ cam_pose
# 构造抓取姿态(RPY)
rot = R.from_euler('z', grasp_angle, degrees=True)
rpy = rot.as_euler('xyz', degrees=True)
# 输出调试信息
print(f"\n📌 抓取检测结果:")
print(f" 像素坐标:({grasp_x_px:.1f}, {grasp_y_px:.1f})")
print(f" 置信度:{max_conf:.3f}")
print(f" 相机坐标系:({cam_x:.3f}, {cam_y:.3f}, {cam_z:.3f}) m")
print(f" UR5基坐标系:({base_pose[0]:.3f}, {base_pose[1]:.3f}, {base_pose[2]:.3f}) m")
print(f" 抓取角度:{grasp_angle}°")
print(f" 点云验证:{len(near_points)}个邻近点(阈值{POINT_CLOUD_THRESHOLD})")
return {
"position": (base_pose[0], base_pose[1], base_pose[2]),
"rpy": (rpy[0], rpy[1], rpy[2]),
"angle": grasp_angle,
"confidence": max_conf,
"cam_position": (cam_x, cam_y, cam_z) # 相机坐标系位置(用于点云可视化)
}
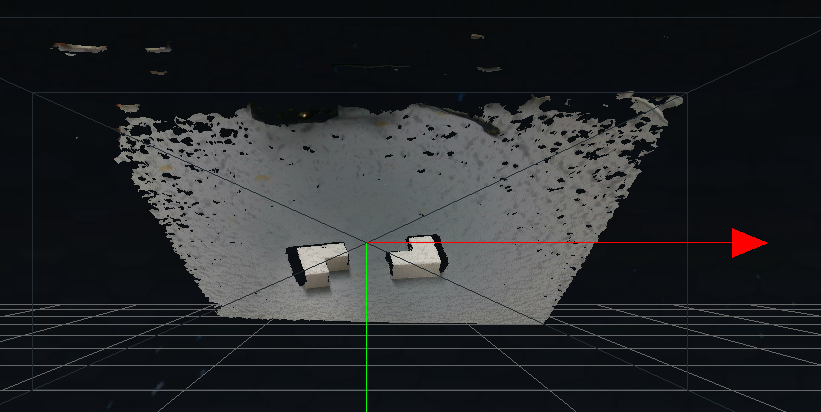
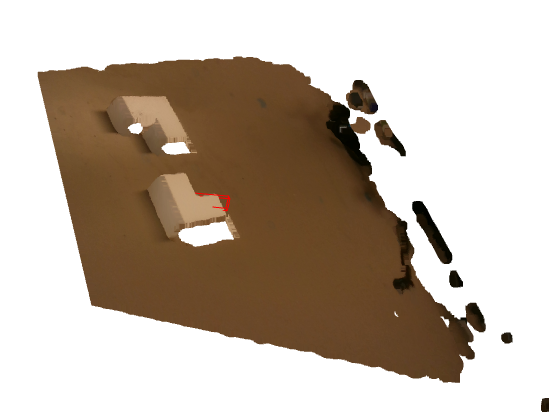
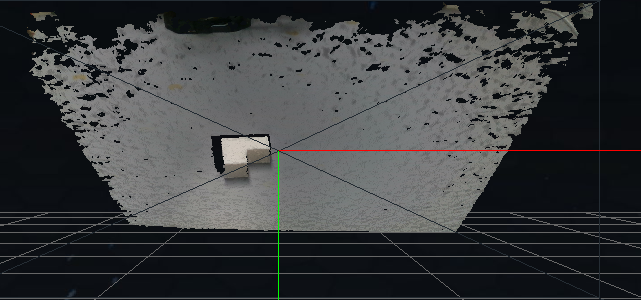
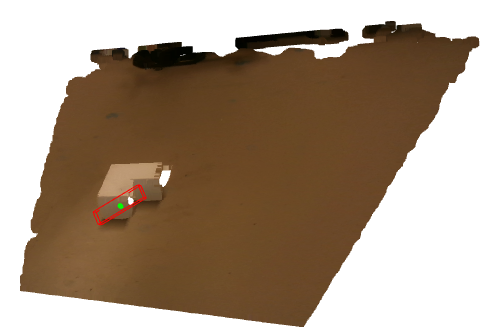
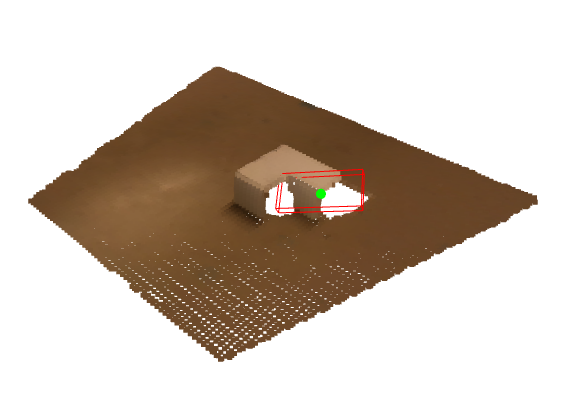
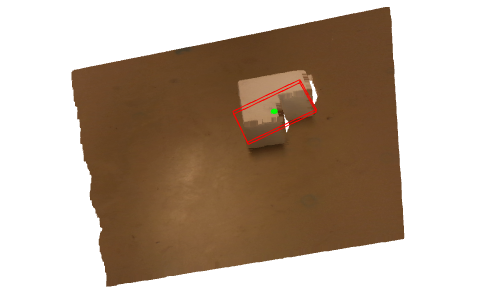
# ======================== 5. 点云+抓取位姿可视化 ========================
def visualize_grasp_pose(pcd, grasp_pose):
"""可视化点云和抓取位姿(适配所有Open3D版本)"""
# 1. 复制点云(避免修改原始数据)
pcd_vis = o3d.geometry.PointCloud()
pcd_vis.points = o3d.utility.Vector3dVector(np.asarray(pcd.points))
if pcd.colors: # 保留彩色点云
pcd_vis.colors = o3d.utility.Vector3dVector(np.asarray(pcd.colors))
# 2. 提取抓取位姿参数
cam_x, cam_y, cam_z = grasp_pose["cam_position"]
grasp_angle = grasp_pose["angle"]
# 3. 生成抓取框的8个顶点(相机坐标系)
center = np.array([cam_x, cam_y, cam_z])
rot_mat = R.from_euler('z', grasp_angle, degrees=True).as_matrix()
half_width = GRASP_WIDTH / 2
half_depth = GRASP_DEPTH / 2
vertices = np.array([
[half_width, -half_depth, 0], [half_width, half_depth, 0],
[-half_width, half_depth, 0], [-half_width, -half_depth, 0],
[half_width, -half_depth, -0.01], [half_width, half_depth, -0.01],
[-half_width, half_depth, -0.01], [-half_width, -half_depth, -0.01]
])
vertices = (rot_mat @ vertices.T).T + center
# 4. 创建抓取框(兼容低版本Open3D)
grasp_box = o3d.geometry.LineSet()
grasp_box.points = o3d.utility.Vector3dVector(vertices)
lines = [
[0,1], [1,2], [2,3], [3,0], # 顶面
[4,5], [5,6], [6,7], [7,4], # 底面
[0,4], [1,5], [2,6], [3,7] # 竖边
]
grasp_box.lines = o3d.utility.Vector2iVector(lines)
colors = [[1, 0, 0] for _ in range(len(lines))]
grasp_box.colors = o3d.utility.Vector3dVector(colors)
# 5. 创建抓取中心点(兼容所有版本)
center_sphere = o3d.geometry.TriangleMesh.create_sphere(radius=0.005)
center_sphere.translate(center)
center_sphere.paint_uniform_color([0, 1, 0]) # 绿色
# 6. 可视化(最稳定的兼容写法)
o3d.visualization.draw_geometries([pcd_vis, grasp_box, center_sphere],
window_name="GraspNet 点云+抓取位姿可视化",
width=800, height=600)
# ======================== 6. 置信度热力图可视化 ========================
def visualize_confidence_map(conf_map):
"""可视化置信度热力图"""
plt.figure(figsize=(8, 6))
plt.imshow(conf_map, cmap='jet')
plt.colorbar(label='Grasp Confidence')
plt.title('GraspNet Confidence Map')
plt.xlabel('Width (scaled)')
plt.ylabel('Height (scaled)')
# 标记最高置信度点
max_idx = np.unravel_index(np.argmax(conf_map), conf_map.shape)
plt.scatter(max_idx[1], max_idx[0], c='red', s=50, marker='*', label='Max Confidence')
plt.legend()
plt.tight_layout()
plt.show()
# ======================== 7. UR5+Robotiq控制 ========================
def control_ur5_grasp(ur5_ip, grasp_pose):
"""控制UR5执行抓取动作"""
# 连接UR5机械臂
try:
rob = urx.Robot(ur5_ip)
rob.set_tcp((0.0, 0.0, 0.1, 0.0, 0.0, 0.0)) # 设置工具坐标系(夹爪)
rob.set_payload(0.5) # 设置负载(kg)
print(f"\n✅ 成功连接UR5:{ur5_ip}")
except Exception as e:
print(f"\n❌ 连接UR5失败:{e}")
sys.exit(1)
# 提取位姿
x, y, z = grasp_pose["position"]
roll, pitch, yaw = grasp_pose["rpy"]
try:
# 步骤1:移动到抓取上方安全位置
safe_pose = (x, y, z + SAFE_HEIGHT, roll, pitch, yaw)
print(f"\n📌 移动到安全位置:{safe_pose}")
rob.movej(safe_pose, acc=MOVE_ACC, vel=MOVE_VEL)
time.sleep(1)
# 步骤2:打开夹爪
print("📌 打开夹爪")
rob.send_program(f"set_digital_out({GRIPPER_PORT}, {GRIPPER_OPEN_VAL})")
time.sleep(GRIPPER_DELAY)
# 步骤3:移动到抓取位置
grasp_pose_full = (x, y, z, roll, pitch, yaw)
print(f"📌 移动到抓取位置:{grasp_pose_full}")
rob.movej(grasp_pose_full, acc=0.05, vel=0.05) # 低速接近
time.sleep(1)
# 步骤4:关闭夹爪抓取物品
print("📌 关闭夹爪抓取物品")
rob.send_program(f"set_digital_out({GRIPPER_PORT}, {GRIPPER_CLOSE_VAL})")
time.sleep(GRIPPER_DELAY)
# 步骤5:抬升机械臂
print("📌 抬升机械臂")
rob.movej(safe_pose, acc=MOVE_ACC, vel=MOVE_VEL)
time.sleep(1)
print("\n🎉 抓取完成!")
except Exception as e:
print(f"\n❌ 抓取过程出错:{e}")
finally:
# 断开连接
rob.close()
# ======================== 8. 主流程 ========================
if __name__ == "__main__":
print("===== UR5+Realsense+GraspNet-v2 精准抓取 =====\n")
# 1. 验证手眼矩阵(可选)
validate_hand_eye_matrix()
# 2. 初始化GraspNet模型
print("\n🔧 初始化GraspNet-v2抓取检测模型...")
grasp_model = GraspNetCPU()
grasp_model.load_pretrained_weights(PRETRAINED_WEIGHTS_PATH)
# 3. 采集相机图像和点云
print("\n📷 采集相机图像和点云(深度滤波中)...")
color_img, depth_img, depth_scale, pcd = capture_realsense_data()
# 4. 检测最优抓取位姿(传入pcd用于点云验证)
print("\n🤖 检测最优抓取位姿(优化深度采样+点云验证)...")
grasp_pose = detect_and_convert_grasp_pose(color_img, depth_img, depth_scale, grasp_model, pcd)
# 5. 可视化结果
print("\n🎨 可视化点云和抓取位姿...")
visualize_grasp_pose(pcd, grasp_pose)
# 6. 显示RGB图像+抓取标记
grasp_x_vis = int((grasp_pose["cam_position"][0] * CAM_FX / grasp_pose["cam_position"][2]) + CAM_CX)
grasp_y_vis = int((grasp_pose["cam_position"][1] * CAM_FY / grasp_pose["cam_position"][2]) + CAM_CY)
cv2.circle(color_img, (grasp_x_vis, grasp_y_vis), 8, (0,255,0), -1)
cv2.putText(color_img, f"Conf: {grasp_pose['confidence']:.3f}", (20, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0,0,255), 2)
cv2.putText(color_img, f"Angle: {grasp_pose['angle']}°", (20, 70), cv2.FONT_HERSHEY_SIMPLEX, 1, (0,0,255), 2)
cv2.imshow("Grasp Detection Result (RGB)", color_img)
cv2.waitKey(3000) # 显示3秒
cv2.destroyAllWindows()
# 7. 执行抓取(确认后执行)
input("\n⚠️ 请确保机械臂工作空间无障碍物,按Enter键执行抓取...")
control_ur5_grasp(UR5_IP, grasp_pose)