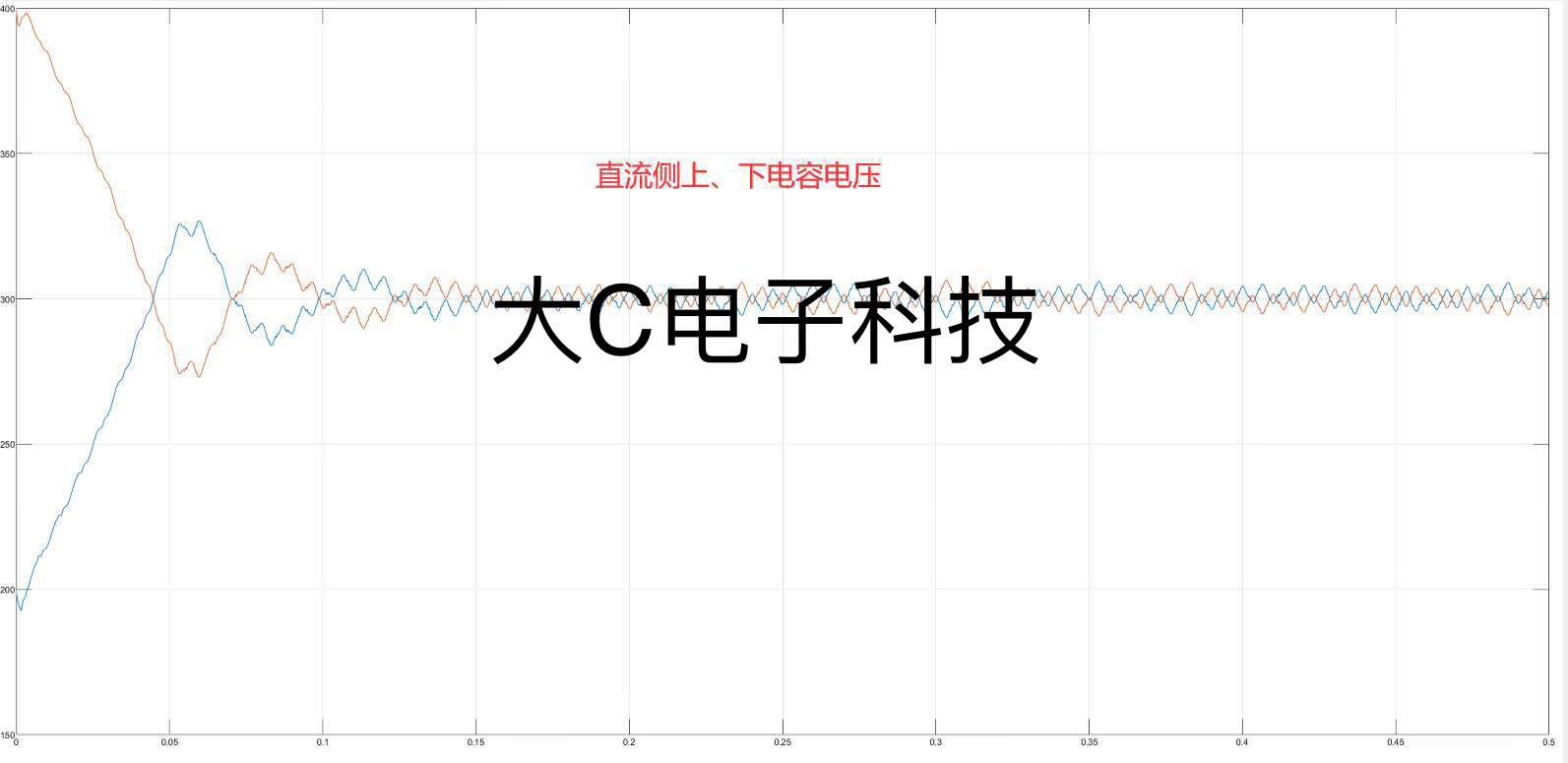
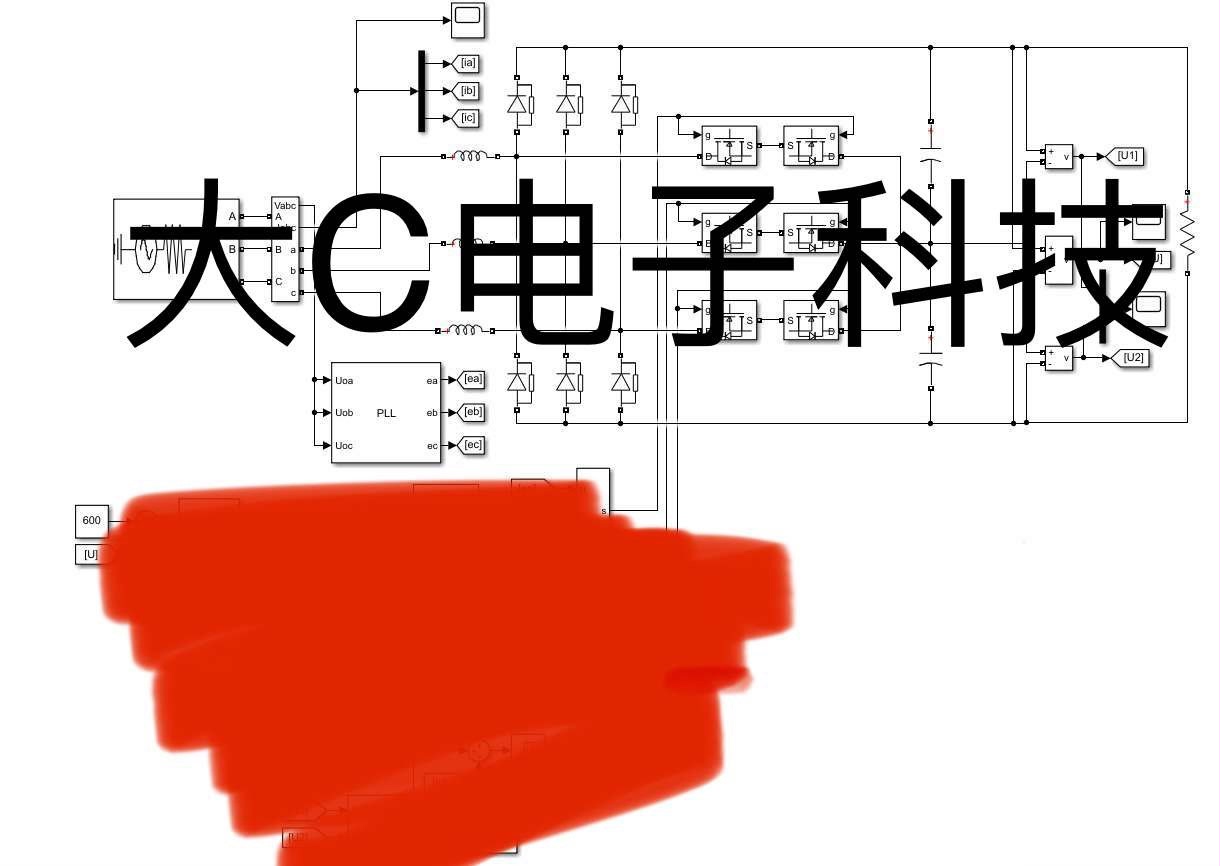
三相三电平维也纳整流器simulink仿真模型 1控制算法采用电压电流双闭环控制; 2外部电压环路为PI控制器; 3内部电流环路为砰砰迟滞控制器(又叫电流置环控制)。
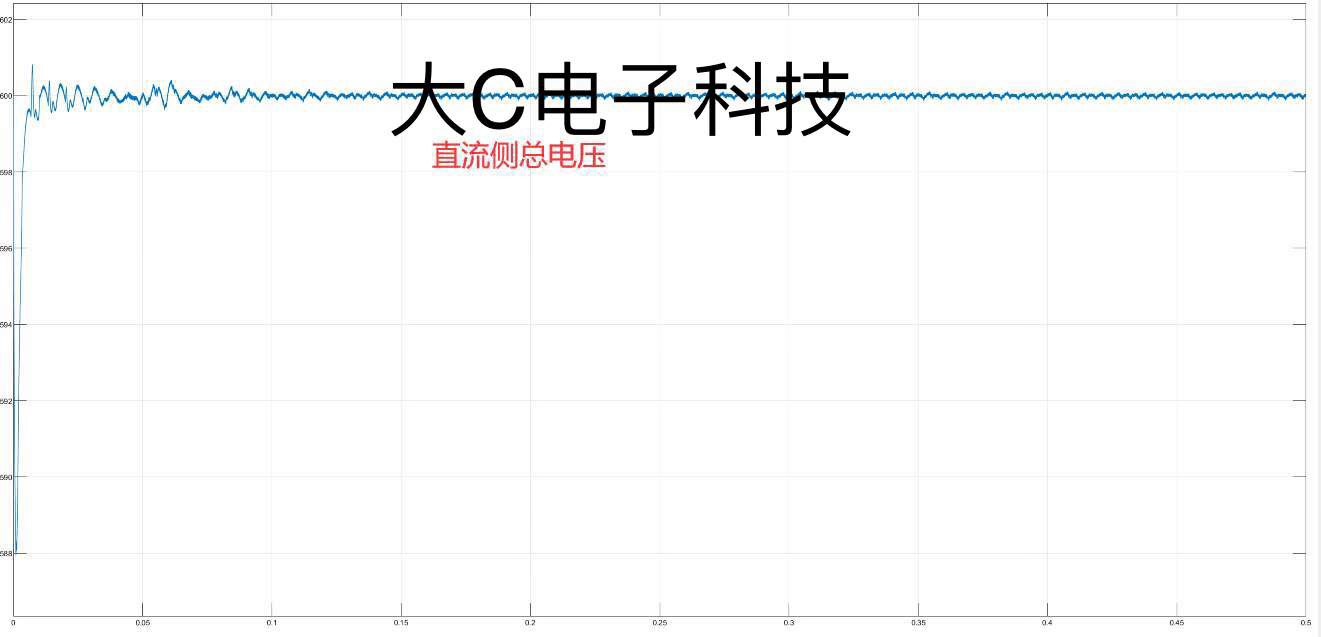
在电力电子领域,三相三电平维也纳整流器凭借其出色的性能,如较低的谐波失真、较高的功率因数等,受到了广泛关注。今天咱就来聊聊基于Simulink搭建其仿真模型以及背后的控制算法。
控制算法核心 - 电压电流双闭环控制
双闭环控制是这款整流器的关键,它由外部电压环路和内部电流环路构成,就像给整流器安上了一双精准的"眼睛"和"手脚",让其能稳定高效地运行。
外部电压环路 - PI控制器
外部电压环路使用PI控制器,这个控制器的作用是维持输出电压的稳定。在Simulink里,实现PI控制其实不难。咱看下面这小段MATLAB代码示例(这里简化为单输入单输出情况,实际应用会结合三相系统做调整):
matlab
% 定义PI控制器参数
Kp = 0.5;
Ki = 0.1;
integral = 0;
prev_error = 0;
% 假设的输入输出变量
input_signal = 10; % 设定值
output_signal = 8; % 当前测量值
% PI控制算法
error = input_signal - output_signal;
integral = integral + error;
control_signal = Kp * error + Ki * integral;
% 更新上一次误差
prev_error = error;在这个代码里,Kp是比例系数,Ki是积分系数。比例部分Kp error**根据当前误差的大小做出快速反应,误差越大,控制信号变化越大;积分部分Ki integral则负责消除稳态误差,随着时间积累,把之前没调节到位的部分补上。两者结合,让输出电压能紧紧跟随设定值。
内部电流环路 - 砰砰迟滞控制器(电流滞环控制)
内部电流环路采用砰砰迟滞控制器,这名字听起来就很酷炫。它也叫电流滞环控制,目的是让输入电流能跟踪电压外环给出的电流指令。在Simulink中搭建它,会用到比较器等模块。同样,咱们看看简单代码实现思路(三相情况简化示意):
matlab
% 假设电流指令和当前电流
current_command = [1 1.2 0.9]; % 三相电流指令
current_measurement = [0.9 1.1 0.8]; % 三相当前测量电流
hysteresis_band = 0.1; % 滞环宽度
for i = 1:3
if current_measurement(i) > current_command(i) + hysteresis_band
% 控制动作,比如调节开关状态减少电流
control_action(i) = -1;
elseif current_measurement(i) < current_command(i) - hysteresis_band
% 控制动作,比如调节开关状态增加电流
control_action(i) = 1;
else
% 保持当前状态
control_action(i) = 0;
end
end这里通过设定一个滞环宽度hysteresis_band,当测量电流超出电流指令加上滞环宽度时,采取措施降低电流;当测量电流低于电流指令减去滞环宽度时,采取措施升高电流。在这个滞环范围内,就保持当前状态。这种控制方式响应速度快,能有效跟踪电流指令。
三相三电平维也纳整流器simulink仿真模型 1控制算法采用电压电流双闭环控制; 2外部电压环路为PI控制器; 3内部电流环路为砰砰迟滞控制器(又叫电流置环控制)。
通过这电压电流双闭环控制,三相三电平维也纳整流器在Simulink仿真模型中就能稳定高效地运行啦。在实际搭建模型时,要根据具体参数和需求对PI控制器参数以及滞环宽度等进行细致调整,这样才能得到理想的仿真效果,为实际应用提供有力的参考。希望这篇小文能让大家对三相三电平维也纳整流器的Simulink仿真模型及其控制算法有更清晰的认识!