西门子200smart,3轴控制程序,西门子触摸屏程序,详细注释,IO表,电气原理图04
最近在车间整了套西门子200SMART的三轴控制系统,这玩意儿在小型自动化项目里真是扛把子。今天就跟大伙儿唠唠实战中攒下的经验,重点说说PLC程序架构和触摸屏联调那些门道。
先甩张IO分配表镇楼(简化版):
DI点 | 功能描述
I0.0 | X轴原点信号
I0.1 | Y轴正限位
I0.2 | Z轴伺服报警
... | ...
DO点 | 控制对象
Q0.0 | X轴脉冲输出
Q0.1 | Y轴方向信号
Q0.2 | Z轴伺服使能
... | ...
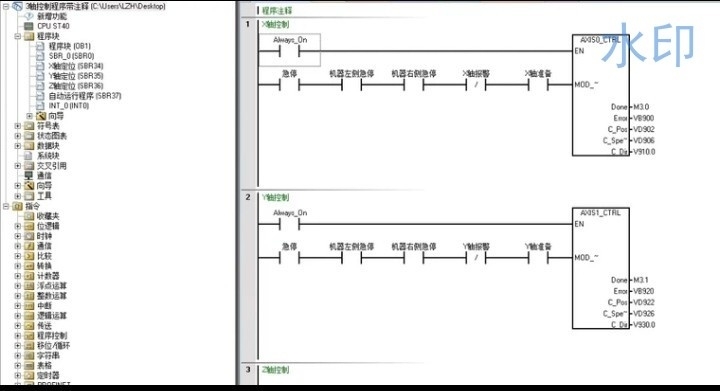
三轴控制程序的核心是运动控制指令库。下面这段轴初始化代码建议放在第一个扫描周期执行:
// 初始化X轴参数
MOV_B 16#8F, SMB67 // 设置PTO模式+脉冲/方向
MOVW 500, SMW168 // 脉冲频率500Hz
MOVD 10000, SMD172 // 目标脉冲量
这波操作给脉冲发生器分配了基础参数。特别要注意的是SMB67这个控制字节,16#8F对应的二进制是10001111,这里启用了PTO(脉冲串输出)和方向控制,具体位定义得查手册确认。
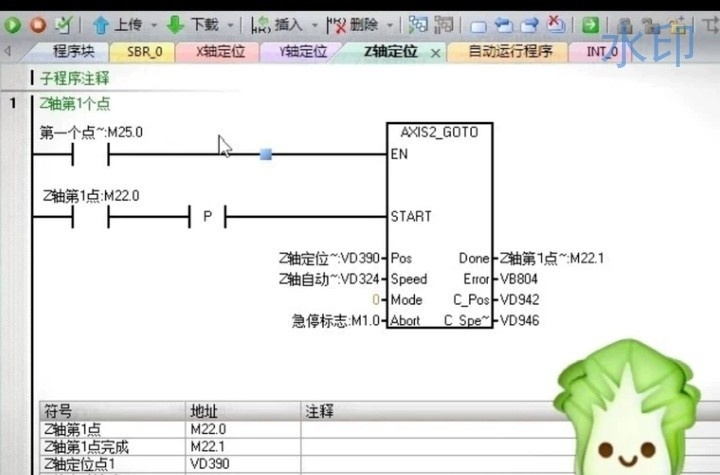
手动模式下的点动控制建议用子程序封装:
// X轴正点动子程序
西门子200smart,3轴控制程序,西门子触摸屏程序,详细注释,IO表,电气原理图04
LD 手动模式
A 正点动按钮
AN X轴正限位
= Q0.0 // 触发脉冲输出
MOVW 800, SMW168 // 点动速度
这里用了直接输出脉冲的方式,注意要串联限位信号做互锁。实际调试中发现,方向信号Q0.1的电平状态得和机械实际运动方向对应,有时候需要反向就改这里。
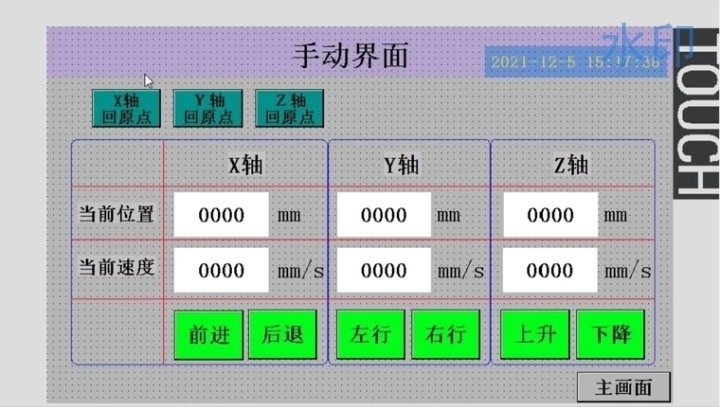
触摸屏程序的关键是做好状态监控:
// 报警显示脚本
IF 获取变量("VW100") & 16#0001 THEN
报警文本 = "X轴超程"

ELSEIF 获取变量("VW100") & 16#0002 THEN
报警文本 = "伺服准备未完成"
END_IF
这种位判断写法比用多个bool变量更节省寄存器空间。调试时在屏上加了临时调试页面,直接把各轴当前脉冲数用趋势图显示,抓位置异常特好使。
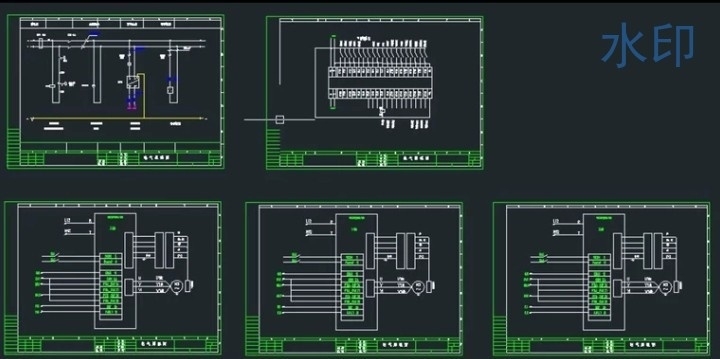
电气原理图04部分有个易错点:伺服驱动的使能信号建议通过中间继电器过渡,别直接接PLC输出点。碰到过现场干扰导致伺服误使能的情况,加个RC吸收回路能稳很多。
最后说个血泪教训:用绝对定位指令时,务必在HMI上做软限位!有次测试忘记设这个,设备直接怼到机械限位,那动静把甲方吓够呛。后来在定位指令前加了段判断:
LDW>= 当前脉冲数, 最大行程
O 紧急停止
AN 暂停状态
= 复位脉冲输出
这套架构跑了大半年还算稳定,核心思路就是状态机控制+异常监控全覆盖。下次有机会再细说三轴联动时的插补算法实现,那又是另一个深坑了。