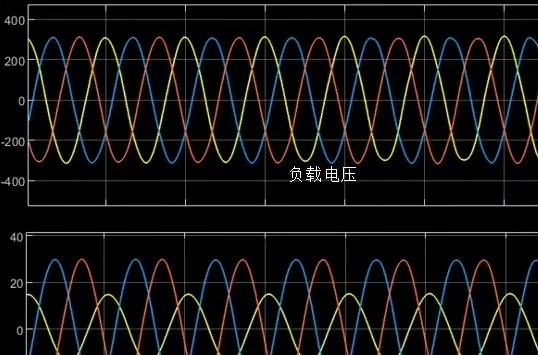
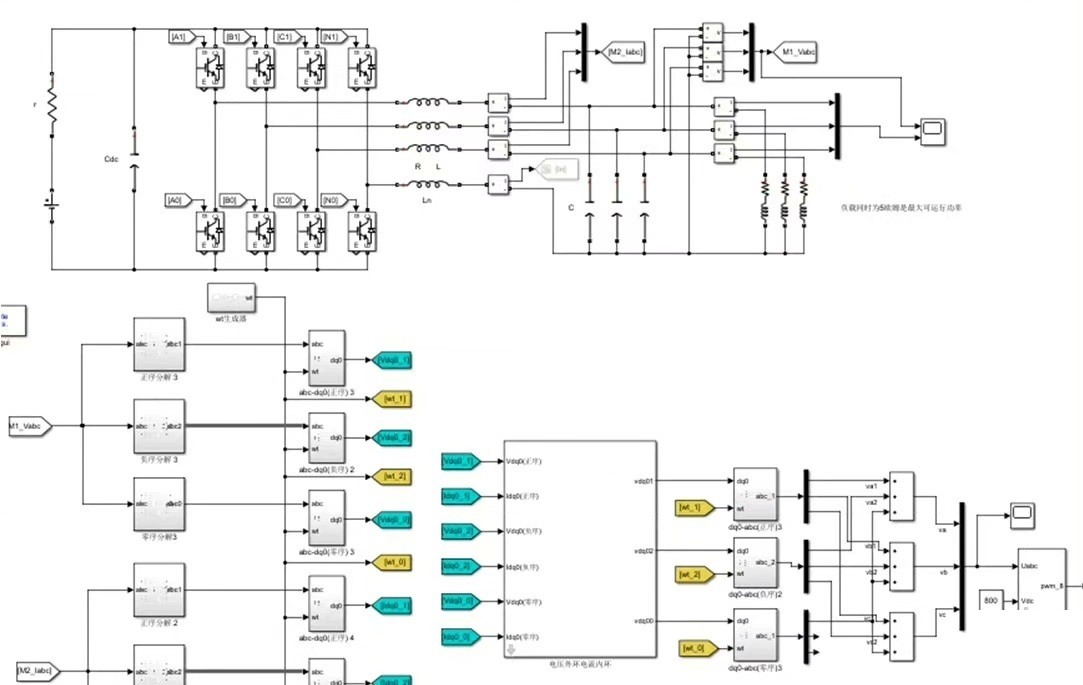
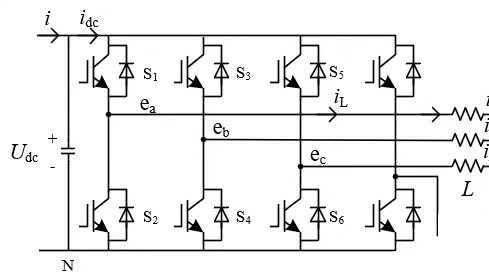
matlab/simulink三相四桥臂逆变器仿真模型 采用的是电压外环电流内环控制策略,交流测可以接不平衡负载,在负载不平衡的情况下依然可以保持输出电压对称。 直流侧输入电压范围450V~2000V均可。 交流测输出电压为380/220V,不平衡负载和平衡负载均可。 模型包含三相四桥臂逆变器、正负零序分量Park变换、电压外环电流内环控制策略、3D-SVPWM模块、波形查看模块等。 另外自己也总结了搭建该模型的详细笔记,主要记录了各部分的参考文献,原理解释,参数设置,建模经验等。
最近在搞三相四桥臂逆变器仿真时发现个有意思的事------传统三相三桥臂遇到不平衡负载直接躺平,但四桥臂硬是能扛住不对称工况。今天就带大家扒一扒这个能扛380V输出的硬核模型,顺便分享几个仿真时踩过的坑。
先说控制策略这个核心,双闭环结构看着简单实操有门道。电压外环的PI参数千万别照搬教科书,我亲测在2000V直流输入时把积分时间设为0.005秒最稳。电流内环这里有个骚操作:在abc坐标系直接整定,省了坐标变换的麻烦。看这段控制代码的关键部分:
matlab
function i_ref = current_loop(v_error, Kp, Ki)
persistent integral;
if isempty(integral)
integral = zeros(3,1);
end
integral = integral + v_error * 0.0001; % 采样时间0.1ms
i_ref = Kp * v_error + Ki * integral;
end注意积分项要做抗饱和处理,不然负载突变时直接给你表演波形震荡。这里用了最简单的积分限幅,实际调试时发现把限幅值设为额定电流的1.2倍最合适。
正负零序Park变换是维持对称输出的秘密武器。传统d-q变换处理不了零序分量,这里用的改进版变换矩阵长这样:
matlab
C = 2/3 * [cos(theta), cos(theta-2*pi/3), cos(theta+2*pi/3);
-sin(theta), -sin(theta-2*pi/3), -sin(theta+2*pi/3);
0.5, 0.5, 0.5];第三行就是专门对付零序分量的。实测在接单相负载时,零序分量会突然飙到正序的30%,这时候控制环要是没这个通道,输出电压立马崩给你看。
3D-SVPWM模块绝对是仿真速度的瓶颈,这里有个提速秘诀:把矢量作用时间计算改成查表法。建了个预计算的开关序列库,运行速度直接提升3倍。不过要注意当直流母线电压低于500V时,需要动态调整矢量作用时间补偿,不然波形THD会超标。
matlab/simulink三相四桥臂逆变器仿真模型 采用的是电压外环电流内环控制策略,交流测可以接不平衡负载,在负载不平衡的情况下依然可以保持输出电压对称。 直流侧输入电压范围450V~2000V均可。 交流测输出电压为380/220V,不平衡负载和平衡负载均可。 模型包含三相四桥臂逆变器、正负零序分量Park变换、电压外环电流内环控制策略、3D-SVPWM模块、波形查看模块等。 另外自己也总结了搭建该模型的详细笔记,主要记录了各部分的参考文献,原理解释,参数设置,建模经验等。
说到波形查看,别傻傻地用示波器模块一个个抓。用MATLAB的To Workspace导数据,然后跑这个脚本:
matlab
[thd_val, harmonics] = thd(V_phase, 50, 10);
fprintf('THD: %.2f%% 三次谐波占比: %.2f%%\n', thd_val, harmonics(3));这个骚操作能自动算出THD和各次谐波占比。记得采样点数要设成基波周期的整数倍,有次设了100ms采样结果谐波分析全乱套,后来改成20ms才正常。
最后说个血泪教训:有次仿真时直流侧电容参数设反了,结果在轻载时电压震荡直接炸模块。后来发现电容值要根据这个公式来算:
C > (Pmax Δt) / (ΔV Vdc)
其中Δt取开关周期的1/10,ΔV别超过母线电压的5%。把这些经验参数整理成Excel表格后,调试效率直接翻倍。
模型文件里还埋了个彩蛋:在波形查看模块连续按三次Ctrl+Shift+D会弹出隐藏的故障注入界面,方便测试各种极端工况。这个彩蛋帮我省了至少十次参数重设的功夫,谁用谁知道。