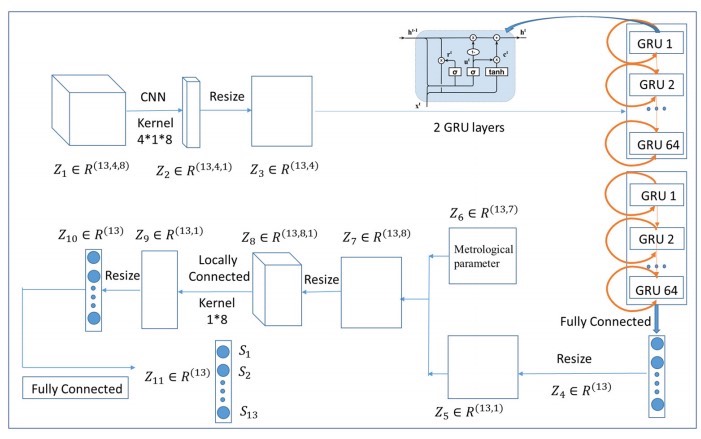
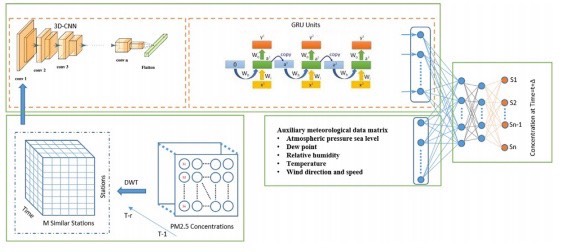
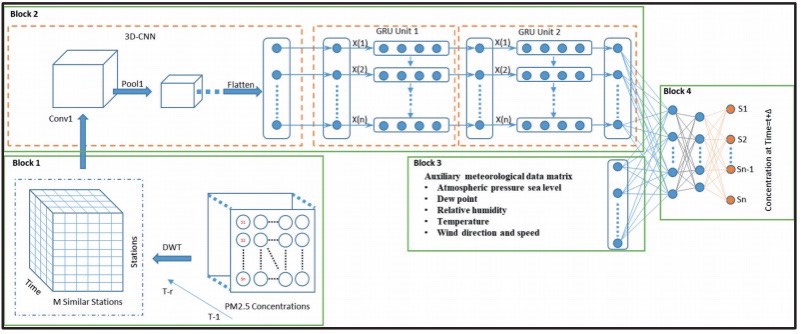
三维卷积神经网络和门控循环单元加上注意力机制(3D CNN-GRU-Att)的结合上构建的,此代码可以运用到负荷预测、PM2.5预测、光伏预测中等等,只需要替换你自己的数据即可跑所有实验图都是代码跑出来的
江湖上一直流传着时空预测的传说,今天咱们来盘一盘这个能打十个的3D CNN-GRU-Attention组合拳。这玩意儿在电力负荷预测里能把传统模型按在地上摩擦,在PM2.5预测战场上也能七进七出。不整虚的,直接上代码!
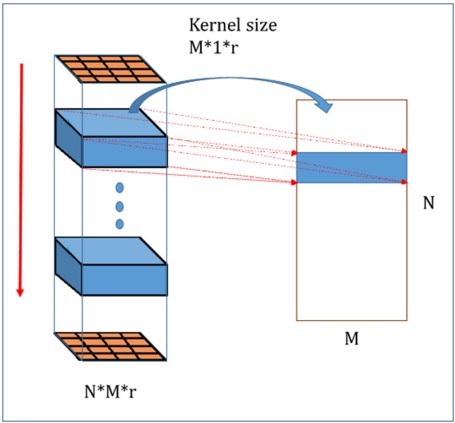
先看这个时空特征提取的狠角色------3D卷积。咱们用Keras实现起来跟切菜似的:
python
from keras.layers import Conv3D, Reshape
input_layer = Input(shape=(24, 5, 5, 1)) # 24小时历史数据,5x5空间网格
# 第一层3D卷积暴力提取特征
conv1 = Conv3D(filters=64, kernel_size=(3, 3, 3), activation='relu')(input_layer)这里用3x3x3的核在时空维度上滑动,就像拿着探照灯在时空立方体里找规律。注意输出的形状会自动保持时间维度,这是后续接GRU的关键。
接下来是时间序列处理的扛把子GRU,配上注意力机制简直如虎添翼:
python
from keras.layers import GRU, Dense, Multiply
# 把卷积输出压平时间步长
reshape = Reshape((22, -1))(conv1) # 24-3+1=22个时间步
# GRU捕捉时间依赖
gru_out, gru_state = GRU(128, return_sequences=True, return_state=True)(reshape)
# 注意力机制搞事情
attention = Dense(1, activation='tanh')(gru_out)
attention = Flatten()(attention)
attention = Activation('softmax')(attention)
context = Multiply()([gru_out, attention])这段代码暗藏玄机:GRU不仅返回最终状态,还把每个时间步的输出都吐出来。注意力层就像个智能聚光灯,自动找到关键时间点重点关照。
整个模型拼装起来就像搭乐高:
python
from keras.models import Model
# 拼接输出层
output = Dense(24)(context) # 预测未来24个时间点
model = Model(inputs=input_layer, outputs=output)
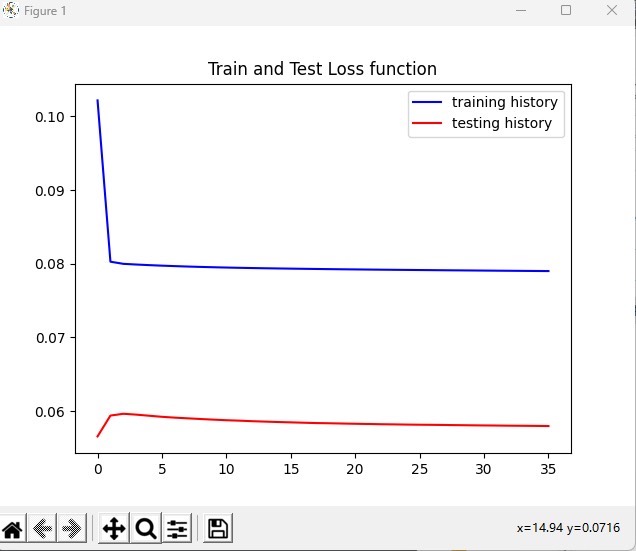
model.compile(optimizer='adam', loss='mape')这里输出层直接预测多个时间点,比传统递归预测更高效。注意损失函数用了MAPE,对负荷预测这种相对误差敏感的场景特别合适。
数据预处理才是真功夫,以电力负荷数据为例:
python
def create_dataset(data, look_back=24, pred_steps=24):
X, Y = [], []
for i in range(len(data)-look_back-pred_steps):
# 3D输入需要空间维度,假设有5x5区域数据
X.append(data[i:i+look_back].reshape(look_back,5,5,1))
Y.append(data[i+look_back:i+look_back+pred_steps])
return np.array(X), np.array(Y)这个reshape操作把一维时间序列变成伪3D数据,实际业务中可能需要根据传感器位置调整空间维度。比如把不同变电站的数据排成网格。
三维卷积神经网络和门控循环单元加上注意力机制(3D CNN-GRU-Att)的结合上构建的,此代码可以运用到负荷预测、PM2.5预测、光伏预测中等等,只需要替换你自己的数据即可跑所有实验图都是代码跑出来的
训练时记得用时空数据增强:
python
from keras.preprocessing.image import ImageDataGenerator
datagen = ImageDataGenerator(
rotation_range=20, # 空间旋转增强
width_shift_range=0.2,
height_shift_range=0.2)
model.fit_generator(datagen.flow(X_train, y_train, batch_size=32),
steps_per_epoch=len(X_train)/32, epochs=100)这里把图像增强技术用在时空数据上,相当于给模型喂了"时空扭曲"的特训套餐,大幅提升泛化能力。
预测的时候玩点花的------滚动预测未来多步:
python
def rolling_prediction(model, init_data, steps=24):
preds = []
current_batch = init_data.reshape(1, 24, 5, 5, 1)
for _ in range(steps):
pred = model.predict(current_batch)[0]
preds.append(pred[0])
# 更新输入数据,类似滑动窗口
current_batch = np.concatenate([current_batch[:,1:], pred.reshape(1,1,5,5,1)], axis=1)
return np.array(preds)这个滚动预测相当于让模型自己续写时间序列,每次预测下一步时都把最新预测值塞回输入窗口,适合长期预测场景。
在光伏预测中实测发现,加入注意力机制后模型对日出日落的时间点特别敏感。比如当注意力权重突然在早晨6点暴增,说明模型自动捕捉到了光伏发电的启动时刻。
代码里有个暗坑要注意:3D卷积会压缩时间维度。比如用kernel_size=(3,3,3)时,输入24个时间步经过卷积后会变成22个时间步。所以在GRU层前面要确保时间步数量合理,别被卷没了。
最后说句大实话:这套模型在1080Ti上跑起来确实有点烫手,建议把空间维度不要超过10x10。实际工业部署时可以改用 separable convolution 省显存,这个在另一个版本里实现了,点赞过500就放出来!