基本概念和流程
Workspace(工作空间):项目本身,资源调度的顶层容器【工业园区】
Package(功能包): 最小的分享单元,包含代码依赖声明和编译规则【独立生产车间】
Node(节点):执行具体任务的逻辑最小单元。控制、驱动、传感器等逻辑的主要载体【全职工人】
ROS2开入门
工作空间创建

Package包的创建、

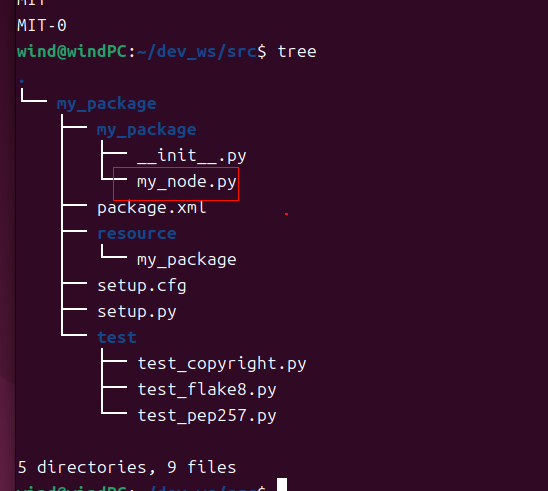
ros2 pkg create --build-type ament_python --node-name my_node my_package节点创建
上一个步骤创建的节点如下
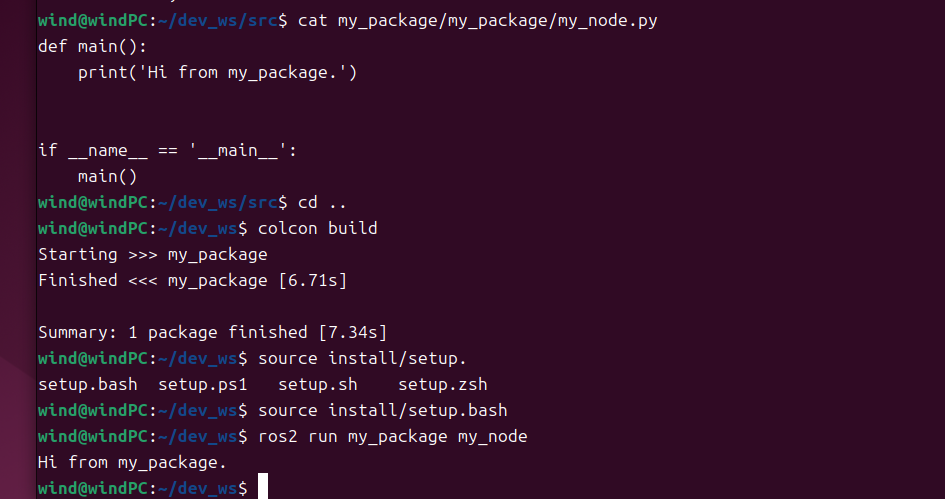
编译运行流程