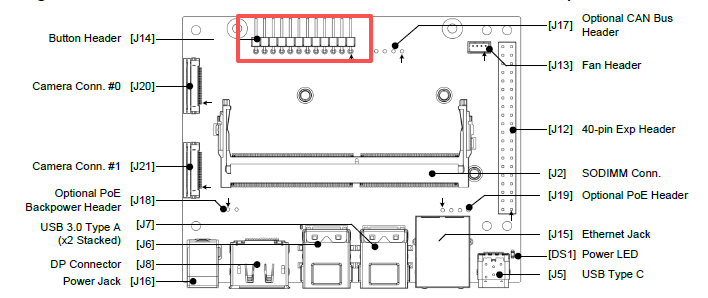

本节要讲一下这个东东。在文档中北叫做"Button Header"。那它到底干什么的呢?
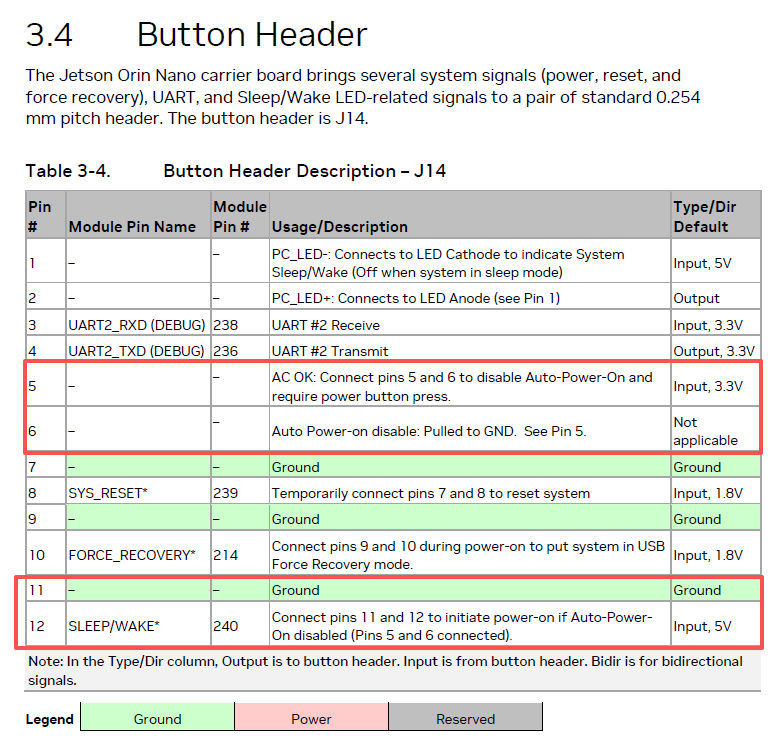 Connect pins 11 and 12 to initiate power-on if Auto-Power-On disabled (Pins 5 and 6 connected). 什么意思?把4个引脚都说了,感觉有些懵逼啊~
Connect pins 11 and 12 to initiate power-on if Auto-Power-On disabled (Pins 5 and 6 connected). 什么意思?把4个引脚都说了,感觉有些懵逼啊~
翻译:
如果已禁用自动开机(且引脚5和6已连接),请连接引脚11和12以启动开机。
逐词解释
| 英文 | 中文 | 解释 |
|---|---|---|
| Connect pins 11 and 12 | 连接引脚11和12 | 用跳线帽(Jumper Cap)将排针的第11和第12号针脚短接。 |
| to initiate power-on | 以启动开机 | 执行这个动作(短接)后,主板就会触发上电开机。 |
| if Auto-Power-On disabled | 如果自动开机功能已禁用 | 有些主板默认设置是"电源一接通就自动开机",如果这个功能被关掉了(通过BIOS设置或硬件跳线),就需要手动触发。 |
| (Pins 5 and 6 connected) | (引脚5和6已连接) | 这是一个前置条件。意思是:你首先要确认引脚5和6已经是短接状态(这通常是启用某种电源控制模式的设置)。 |
到底是什么操作?
这实际上是说主板上两档开关的完整使用流程:
-
首先 ,你需要把开关A(引脚5-6)拨到某个位置(通常是"手动/远程触发模式")。
-
然后 ,当你想开机时,不能直接插电,而是需要按一下开关B(短接引脚11-12),机器才会启动。
组合起来就是:
在设置了"手动触发开机"模式(引脚5-6已连)的前提下,如果你想现在开机,就需要去触发一下开机信号(短接引脚11-12)。
应用场景
场景一:通过外部按钮开机
-
你可以把引脚11和12 通过两根线引出来,接到机器人外壳上的一个物理开机按钮上。
-
效果:平时机器是断电状态,你按一下外壳上的按钮(相当于短接11-12),主板就启动了。这比每次都打开机箱去按主板上的小开关要方便得多。
场景二:通过底盘电源逻辑自动开机
-
你可以把引脚11和12 接到机器人的底盘电源控制板的一个继电器输出上。
-
效果 :当你给机器人总电源上电时,底盘控制板先启动,然后它自动发出一个脉冲信号(短接11-12),主控电脑就跟着开机了。这样你就实现了**"总闸一推,全系统自启"**的效果,无需任何人工操作。
为什么还要提到"引脚5和6已连接"?
这其实是一个很精巧的设计,让工业主板既能适应"上电即开"的简单需求,也能适应需要远程/外部控制的复杂集成场景。
因为主板需要知道你要用哪种方式开机。如果你想要这种"通过外部信号触发开机"的模式,就必须先通过连接引脚5-6来告诉主板:"嘿,我现在不要你一通电就开机,我要等着收到引脚11-12的信号再开。"这就是禁用Auto-Power-On并进入待机触发模式。
| 项目 | 说明 |
|---|---|
| 引脚5-6的作用 | 模式选择。连接它们通常是告诉主板:进入"待触发开机"模式。 |
| 引脚11-12的作用 | 触发信号。短接它们就是告诉主板:现在,请开机。 |