技术进步与满足社会需求之间的关联早已得到充分阐释,正如那句经典格言:需求是发明之母 。然而,人们相对忽视的一点是:为少数群体设计的解决方案,往往会演变为面向大众的通用技术。
"路缘切割效应" 这一概念,源于人行道与马路之间增设的平缓过渡坡道,它精准描述了上述现象:在残障议题中,为改善残障人士生活所做的实质性投入,最终能提升所有人的生活质量(图 1A)。短信、有声读物、电动牙刷等产品,最初都是作为辅助技术被开发出来的。
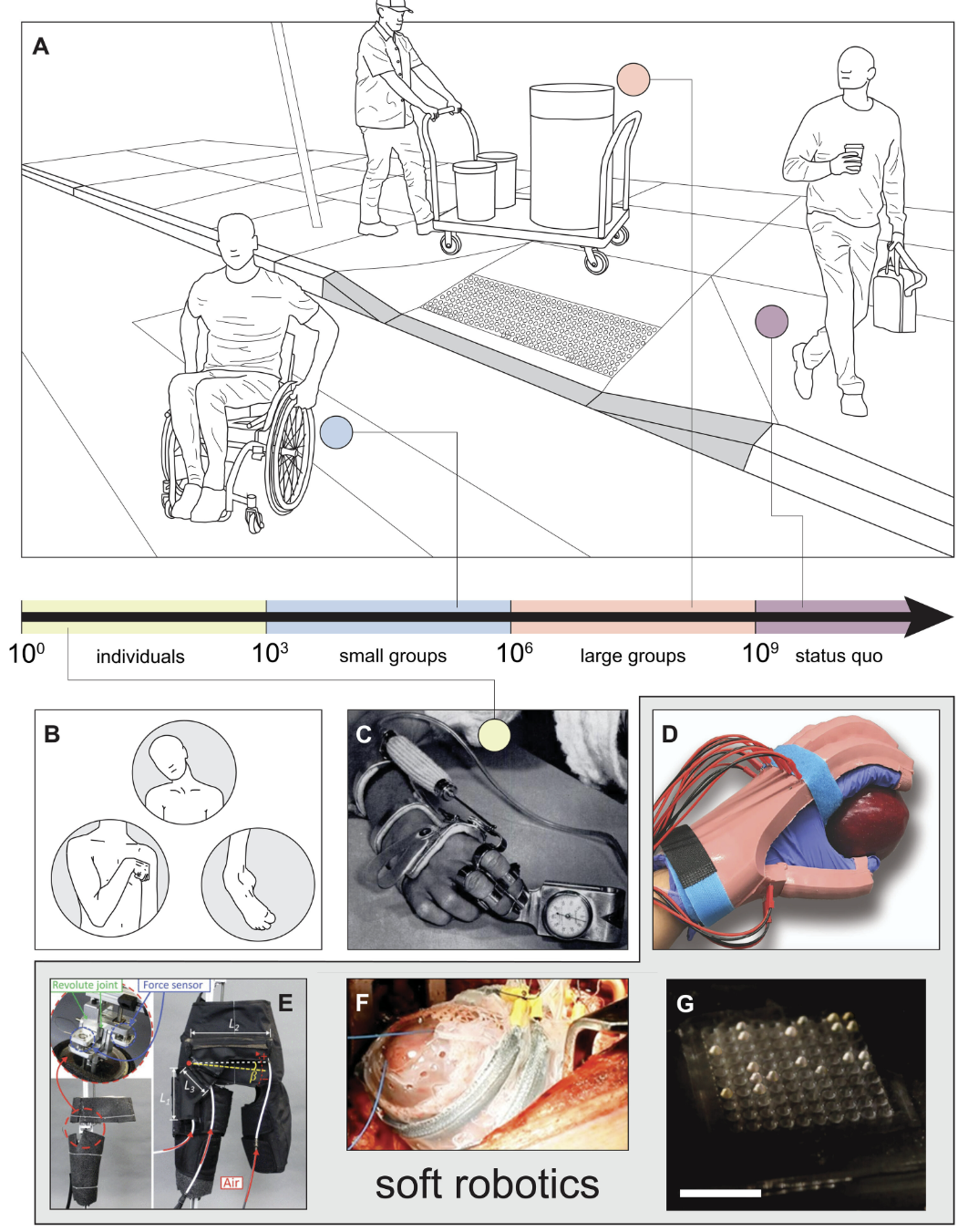
图 1 软机器人领域中的残障创新传承
(A)20 世纪 70 年代,在残障维权人士的推动下,路缘切割坡道得以普及,这一案例直观展现了残障导向创新所能带来的广泛社会收益。这项最初为提升轮椅使用者行动能力而设计的措施,很快也方便了推行李车、婴儿车的人群,如今已成为现代城市中人们习以为常的基础配置。
(B)中风及其他疾病引发的神经肌肉功能障碍,可能累及身体多个部位。
(C)与路缘切割坡道的逻辑相似,麦基本气动执行器的发明,源于满足个体需求:它为其女儿瘫痪的手部恢复了基本活动能力,也为软机器人领域奠定了重要基础。图中一名研究参与者正使用同类麦基本驱动支架测试握力,其中执行器为白色编织圆柱结构。
(D)用于康复训练的气动手部矫形器,在传统刚性手部矫形器的基础上进一步拓展,可用于应对中风等疾病引发的神经肌肉障碍。
软驱动原理还被应用于:(E)髋外展辅助外骨骼服;(F)新一代麦基本人工肌肉,目前已被用于驱动微创心室辅助装置;(G)针对气动执行器在体积、重量、功耗与成本(SWaP-C)上的限制进行改进,相关思路最终催生出可帮助盲人及视障人士获取数字信息的设备。
"残疾" 所涵盖的感官、智力与肢体障碍,很多时候无法仅通过治疗原发病得到解决,而需要对建筑环境进行改造(如路缘坡道),或依靠辅助工程技术创新。例如,多种病症都可能导致依赖复杂神经肌肉机制的肢体功能丧失:创伤性脑损伤、脊髓损伤可引发痉挛性肌张力增高,健康的肌肉因运动神经元调控失常而无法正常放松(图 1B)。
传统机器人研究大多通过可穿戴外骨骼与支架来应对肢体残疾,但这类系统依赖原本为工业自动化设计的精密构件。软机器人领域则具有特殊的历史渊源:它的起源本身就与残障需求紧密相关。约瑟夫・麦基本为帮助患有小儿麻痹症的女儿开合瘫痪的手部,发明了气动人工肌肉,这也成为软机器人的重要源头(图 1C)。
尽管麦基本执行器的出现比 "软机器人" 这一概念早了近 50 年,但使用柔性材料与另类驱动方式设计人体交互设备的思路,至今仍是研究热点。
随着材料科学与增材制造技术的发展,柔性气动驱动已被应用于:中风患者使用的手部康复手套;辅助行走的髋外展外骨骼服;心脏心室辅助套囊等装置(图 1D--F)
通过控制通道几何形状与应变限制元件的位置,可以直接 "编程" 驱动器的形变方式,不再需要麦基本早期设计中的刚性外骨骼连杆,让设备与人体的贴合度与兼容性大幅提升。
柔性气动执行器已在机器人领域得到应用,但驱动整套系统所需的泵、阀、电池等外部组件,在体积、重量、功耗与成本(SWaP-C) 上存在明显短板,制约了无缆化、柔性可穿戴辅助设备的实际落地。
过去十年,软机器人领域汇聚了多学科力量,共同致力于降低 SWaP-C 限制、研发实用化柔性设备。借鉴生物系统的精巧结构,许多研究探索将储能、结构、驱动、传感、计算等功能集成到常规柔性材料中。例如:静电驱动器可在驱动的同时感知自身电容;气动气体被离子液体替代,实现液压驱动与电能存储一体化。
此外,组织工程研究者已初步验证,工程化活体肌肉组织可作为软机器人驱动器。这类新型生物混合技术将生物优势引入工程领域,如肌肉对环境的自适应能力、微纳结构设计的灵活性,以及高能量密度化学储能等。
尽管这类技术目前的输出功率尚不足以替代可穿戴设备中的传统电机,但部分静电驱动器研究已证实,其可实现温和、隐蔽的触觉刺激,有望为盲人、听障者、聋盲人群提供触觉信息通道。
近期,我们团队实现了柔性材料中微流控与气相燃烧的耦合,在不依赖机电阀门的前提下,实现了大量柔性流体驱动器的控制,突破了传统气动系统在可扩展性与 SWaP-C 性能上的瓶颈(图 1G)。
令人意外的是,这一非常规思路同样适用于无障碍领域:当前仍缺乏低成本的整页式电子盲文触觉显示方案("圣盲文" 屏需要约 6000 个驱动器)。2020 年以前,商用盲文显示器仅支持单行刷新,极大限制了视障人士获取数字文本与图形内容。此后,多款多行显示器陆续问世,其中包括一种气动方案,通过微流控逻辑电路替代传统阀门(Codex、1024 点、NewHaptics)。
传统电磁、压电型盲文显示器易受灰尘、液体、跌落冲击影响,而我们提出的柔性材料方案密封性好、无滑动部件,抗冲击、抗污损能力更强。将软机器人设计理念引入无障碍领域,可将其优势拓展到全新维度。
过去十年的软机器人研究表明,想要研发出在功率、控制带宽与效率上媲美传统电机的替代品,难度极大。在这一难题取得突破前,柔性无缆可穿戴设备(如外骨骼、假肢)的商业化应用仍将受限。
不过,优化有缆式设计在残障康复中具备现实的短期价值。气动手部矫形器可进一步精细化适配不同人体解剖结构,用于长期临床研究,逐步缓解痉挛肌肉,并拓展至身体其他受累关节。这类牵引拉伸技术未来还有望用于缓解更广泛人群的肌肉骨骼疼痛(如坐骨神经痛)。
无论具体应用场景如何,在科研团队、残障人士与运动康复专业人员之间建立长期合作关系,有助于各方更深刻地理解残障挑战、运动机能学与软机器人技术潜力。
我们最初因硅胶盲文触点的可读性与触感问题,向盲人社区征求反馈。通过会议交流、电话访谈与实地走访相关机构,我们不仅了解到长时间阅读可能导致手指疲劳,还获得了关于盲文教育现状与盲人真实生活经历的宝贵认知。
但包容性设计的核心理念,首先是 "为一个人解决一个问题"。在研究经费与时间有限的情况下,并不需要一开始就对接整个群体,而是可以从小而具体的需求切入。
我们建议,研究团队主动邀请残障人士走进实验室,分享研究进展,深入了解他们的日常生活与真实困难。这些需求或许不像 "恢复全面运动功能" 那样宏大,但更清晰、更可行。我们相信,源于研究者与个体之间紧密沟通的软机器人解决方案,会更自然地生长出来,从而提升辅助技术与软机器人创新的成功率,尤其在穿衣等日常场景中。
本文虽以运动障碍为核心,但文中提出的包容性设计思路,同样适用于感官障碍、智力障碍等其他领域,软机器人技术也能在这些方向产生重要价值。
路缘坡道可以刻意设计,但路缘切割效应无法刻意制造 ------ 它只是良好包容性设计自然带来的结果。将这些理念深度融入软机器人研究,未来必将像路缘坡道一样,让技术从服务少数人,最终惠及所有人。