通过网盘分享的文件:APM小型纸飞机.zip
链接: https://pan.baidu.com/s/1_6-f23KNUP0kxfRISs7Tag?pwd=5z4r 提取码: 5z4r
注:
安装前请先学习APM飞控相关基础使用
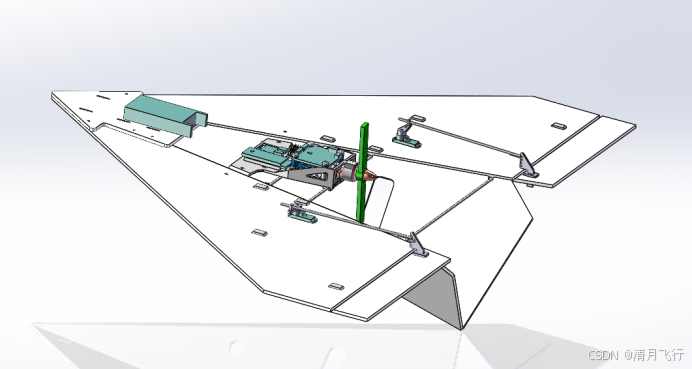
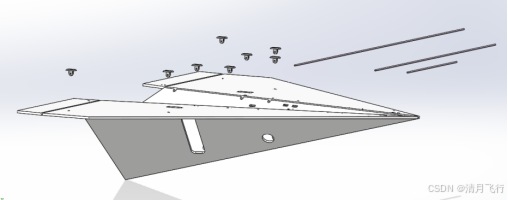
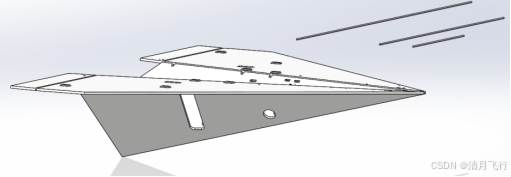
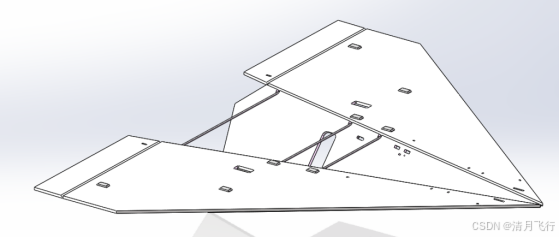
(1)空机
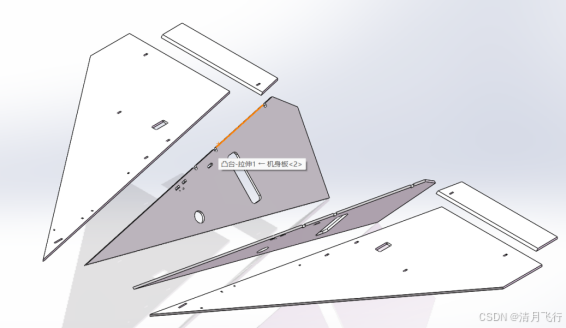
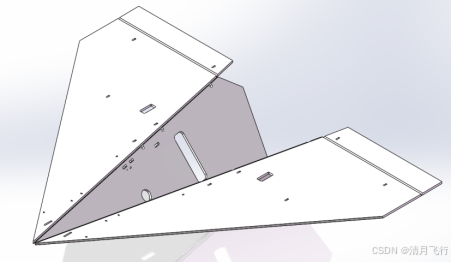
1)安装魔术板空机
左右副翼连接处先使用小刀或尖嘴钳制作出45度的斜度:
使用单纹纤维胶组装
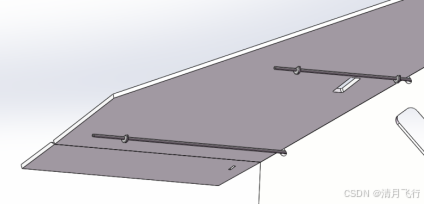
2)安装碳纤维支撑杆
先安装3D打印的M2碳杆固定件,再安装对应的碳纤维支撑杆。
3)安装副翼舵角
安装前,先在安装孔上下涂抹少许泡沫胶。
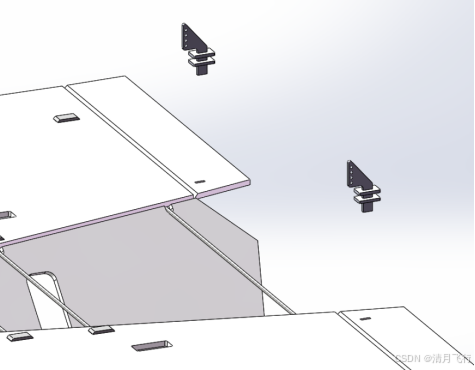
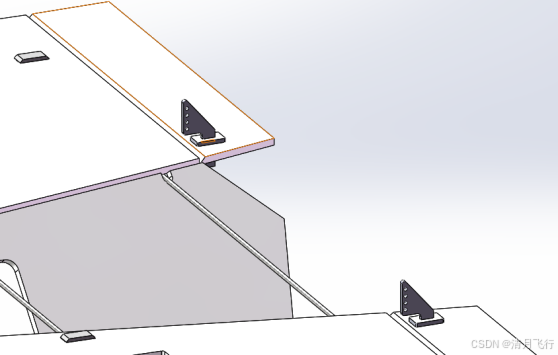
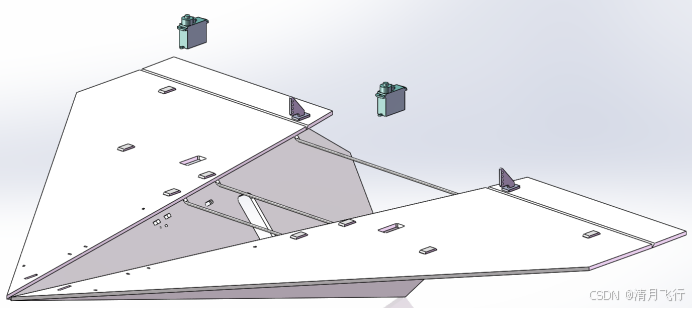
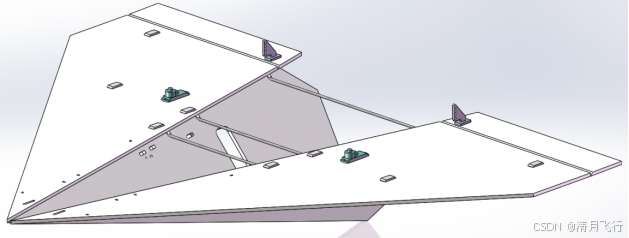
4)安装舵机
舵机接入后,涂抹泡沫胶进行固定。先不安装舵机舵盘
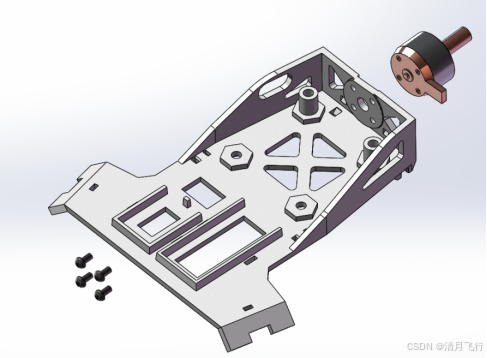
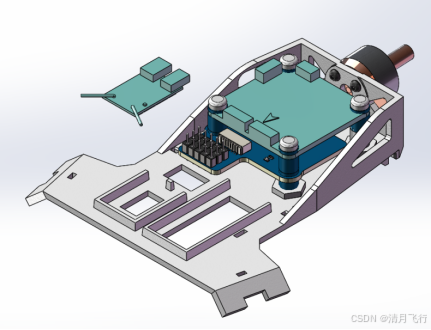
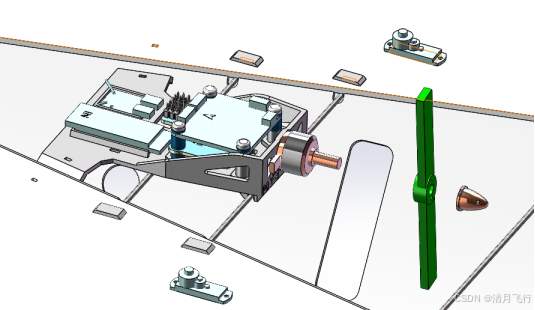
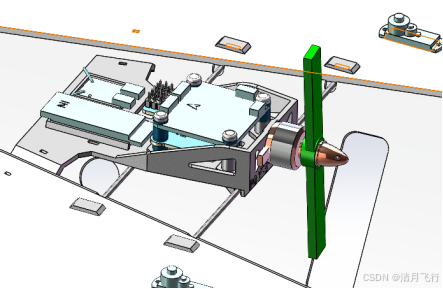
(2)飞控&动力主体
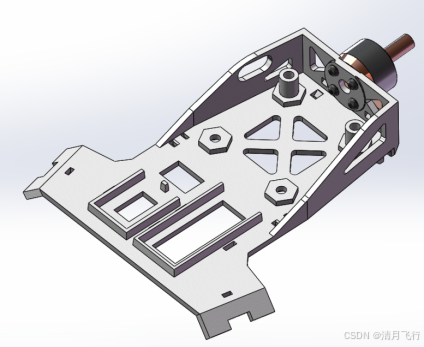
1)安装无刷电机到底座
使用M2X4内六角头螺丝,注意电机接线朝向正确(水平向右)
2)确保分电板已正确焊接总电源线、电调电源线、接收机电源检测线
3)使用 SH1.0双头8P 接线连接飞控与分电板
4)安装接收机信号线
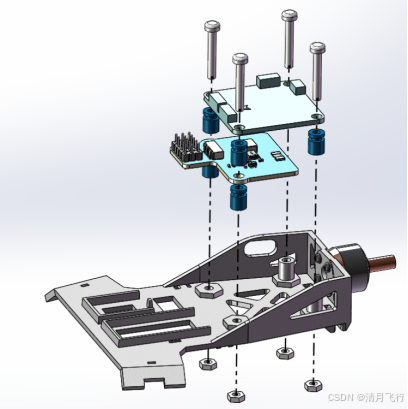
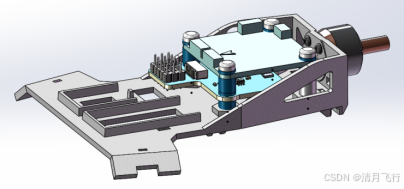
5)安装飞控到底座
使用到M3X8减震柱、M3X20十字圆头尼龙螺丝。安装时最好将接线机信号线拨至安装柱内侧。
6)固定接收机
先将多余线緾到底座,再连接至接线机,最后使用扎带固定接收机。
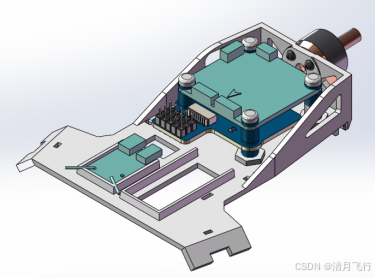
7)固定电调
8)连接电调接线
信号线多余部分先緾绕至底座,再接入分电板M3接口处。
电机控制线先初步与电机电源线一一对应连接,之后测试时可能会更改线序。
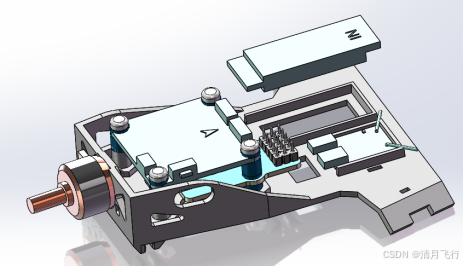
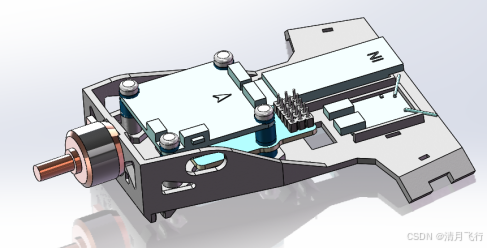
(3)电机方向测试
1)连接LGC地面战
用USB线连到到电脑
2)电池上电(确保桨叶已经拆除!!!)
3)地面站中查看电机对应PWM通道的值
4)电机方向调试
遥控器解锁电机,查看电机旋转方向。从机尾向前看,其应该为逆时针方向旋转。
如果方向相反,则对电机与电调任意两根连接线。
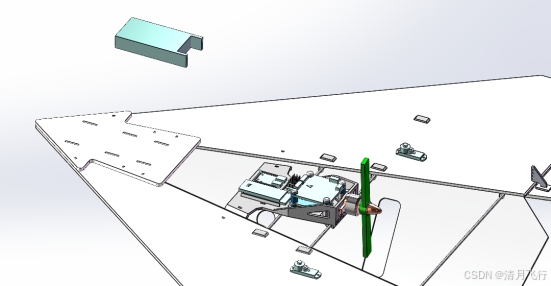
(4)飞控安装与接线
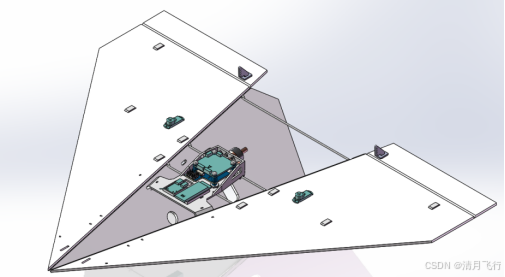
1)安装 飞控&动力主体 到空机
将3D打印底座的接头接入空机,调整好空机的展开角度使两者较好贴合。
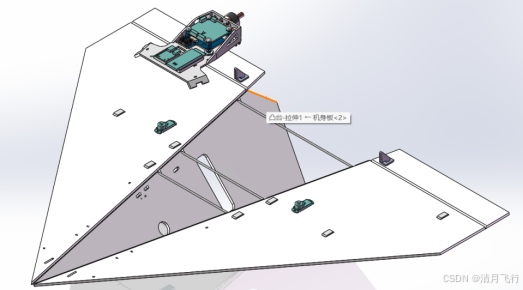
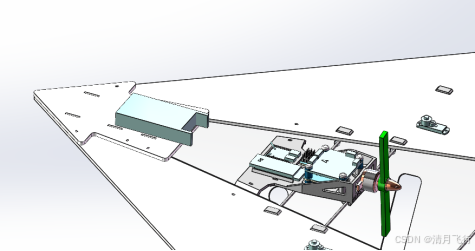
2)粘贴安装 电池固定板
粘贴完成后,使用扎带进一步固定,上方粘贴魔术贴(长75mm)。
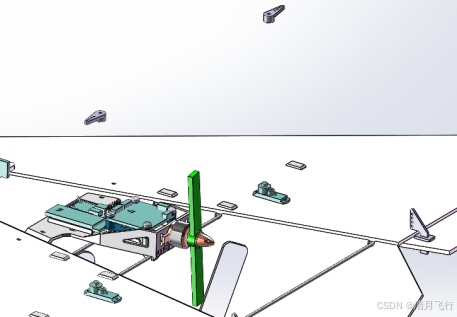
3)粘贴固定 碳杆固定块
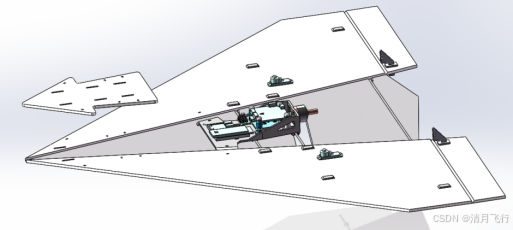
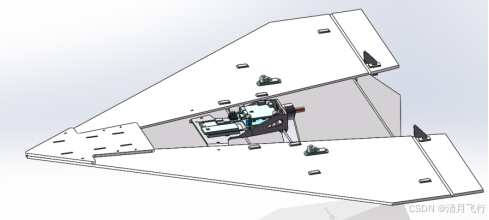
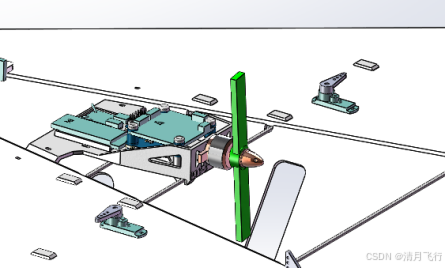
4)使用扎带固定 飞控&动力主体
在前后分别用扎带固定其到空机。
并安装桨叶
5)机体头部安装电池扎带与硬面魔术贴
6)将电池安装至头部
使用扎带固定,使用BB响测量电压,确保单片电压都高于3.7V
(5)测试
1)连接LGC地面战
用USB线连到到电脑
2)电池上电(确保桨叶已经拆除!!!)
3)调整两舵机PWM为0
地面站中确定两舵机PWM值为零
4)安装舵机舵盘
尽量使其与舵机长侧边线垂直,先不安装舵盘螺丝
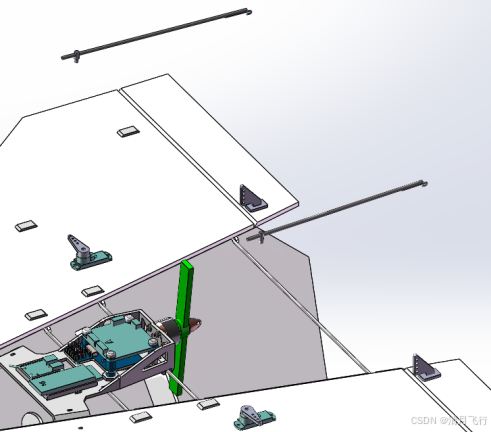
5)制作拉杆
使用M2.5内缩管
舵机处,位于最外边第三孔
舵角处,位于内内数第三孔
先制作成下图中所示,拉勾两端与杆边缘平齐。安装后如果位置不合适,用拉火机加热后细调

6)安装拉杆
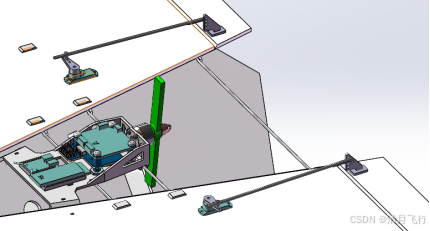
7)副翼调试
零位时,两副翼相差不大,则在飞控中设置对应航模的中位值。
零位时,两副翼相关较大,则拆除热缩胶后重新制作偏差较大的拉杆。