需求 :使用APM 地面站的摇杆,比如罗技的模拟飞行套装(油门,摇杆、脚蹬)来操控飞控的输出。直接通过数据链发送操控信息给飞控。
**解决方法 :
**
设置ch1开始的各个通道。可用用auto detect来识别对应的通道。这个和模拟飞行游戏类似。
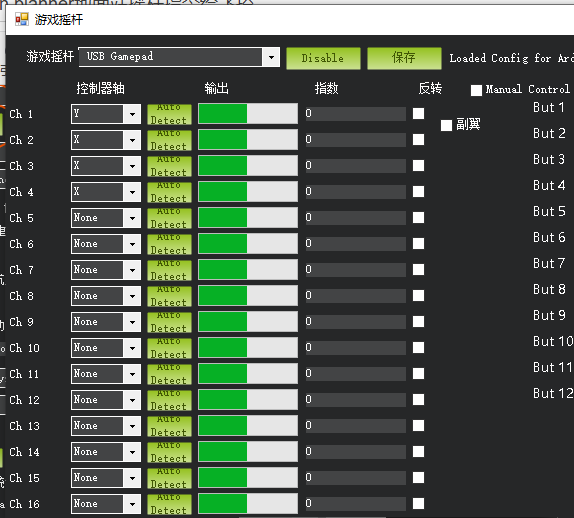
注意,先测试通道,再点击启用
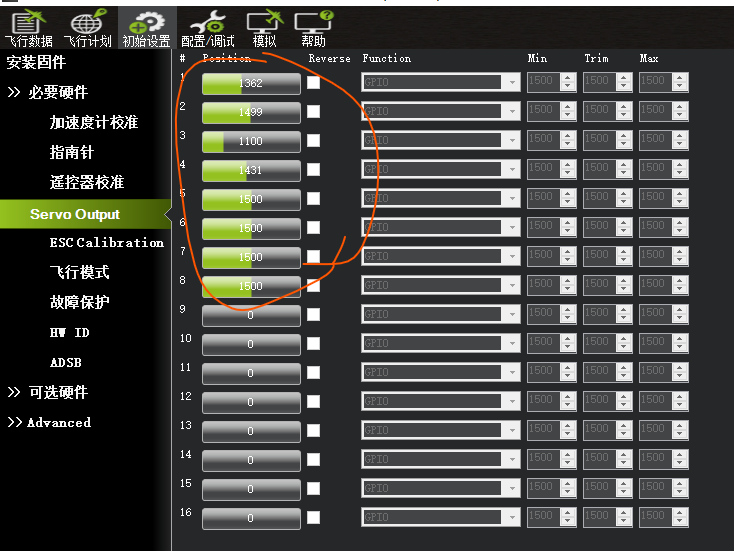
然后,回到电机输出界面,操纵对应的杆,就能看到输出发生了变化。
为什么这么做?
通过数传或者数据链,传输距离远,普通的传统遥控器+接收机,一般1到2km,信号就不行了。而使用数传和数据链,可用几十公里。
另外,玩开源飞控,这么做开源不改固件和设置,直接上手。