需求:由于舵机是CAN总线舵机,需实现APM开源飞控遥控器输入PWM通道到CAN的发送。
方法1:修改APM固件源码,编译,运行,测试。实现复杂。
方法2:使用lua脚本。实现简单
目前采用方法2,使用lua脚本:
几乎所有运行ArduPilot 4.5及以上固件、并且有足够存储空间的飞控,理论上都支持Lua脚本
一定要升级飞控版本到4.5以上。早期的支持比较差,各种运行不通。
✅ 运行Lua PWM→CAN 的必要设置(完整清单)
一、固件版本要求
项目 要求 说明
ArduPilot版本 ≥ 4.5.0 4.6.3验证可用,4.5以上才完整支持Lua CAN API
飞控硬件 有足够Flash/MCU CUAV V5+/X7、Pixhawk系列、H7系列等
二、参数设置(必须)
-
Lua脚本总开关
参数 设置值 说明
SCR_ENABLE 1 启用Lua脚本引擎
SCR_DIR_DISABLE 0 确保scripts目录被读取(默认0)
-
CAN接口参数(以CAN1为例)
参数 设置值 说明
CAN_P1_DRIVER 1 启用CAN1硬件接口
CAN_D1_PROTOCOL 12 (Scripting2) 关键! 让Lua脚本接管CAN口
CAN_P1_BITRATE 按需(如250000) 与你的CAN设备匹配
如果是用第二个CAN口,对应参数为 CAN_P2_DRIVER、CAN_D2_PROTOCOL
-
修改参数后的关键操作
操作 说明
写入参数 点击"写入参数"保存
完全断电重启 拔掉USB线和电池,等30秒再上电
只点"重启飞控"可能不够,彻底冷启动才能让CAN驱动正确初始化
三、脚本文件要求
项目 要求 说明
存放路径 /APM/scripts/ 必须严格区分大小写
文件名后缀 .lua(小写) 不能是 .lua.txt
文件编码 UTF-8 无BOM 推荐用VS Code/Notepad++编辑
上传新脚本前,快速过一遍:
固件版本 ≥ 4.5(当前4.6.3 ✅)
SCR_ENABLE = 1
CAN_P1_DRIVER = 1
CAN_D1_PROTOCOL = 12(关键!)
已完全断电重启(拔USB+电池)
脚本放在 /APM/scripts/ 目录
文件名以 .lua 结尾
代码中用 CAN:get_device2(5)(Protocol 12专用)
定时用 update 函数(最兼容)
CAN ID用 uint32_t() 包裹
CAN分析仪已监听或设备已连接
lua
-- pwm_to_can_template.lua
-- 稳定版模板(Protocol 12 + update函数)
```lua
local driver = CAN:get_device2(5)
if not driver then
gcs:send_text(0, "CAN init failed")
return
end
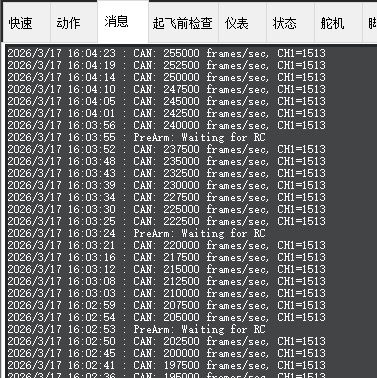
gcs:send_text(0, "PWM→CAN script started")
local last_send = 0
local TX_INTERVAL = 20 -- ms
local frame_count = 0
local function send_frames()
frame_count = frame_count + 1
for ch = 1, 9 do
-- 读取PWM
local pwm = rc:get_pwm(ch) or 1500
pwm = math.min(math.max(pwm, 1000), 2000)
-- 构建数据(根据你的协议修改)
local data = { 0x22, 0x03, 0x60, 0x00,
pwm % 256, math.floor(pwm/256),
0x00, 0x00 }
-- 发送CAN帧
local msg = CANFrame()
msg:id(uint32_t(0x0600 + ch))
msg:dlc(8)
for i = 0, 7 do
msg:data(i, data[i+1])
end
driver:write_frame(msg, 10000)
end
-- 调试输出(每秒一次)
if frame_count % (1000/TX_INTERVAL) == 0 then
gcs:send_text(0, string.format("Running: %d Hz", 1000/TX_INTERVAL))
end
end
local function update()
local now = millis()
if now - last_send >= TX_INTERVAL then
send_frames()
last_send = now
end
return update, TX_INTERVAL
end
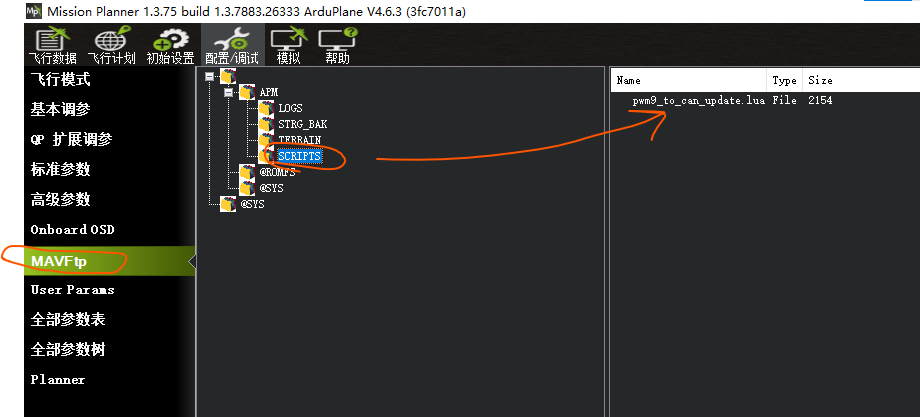
return update()保存代码,然后在mission planner中拷贝到这里,如果没有SCRIPTS文件夹,就自己建立一个。
最后的效果:```