随着智能机器人技术的飞速发展,赋予机器人类似人类的感知能力,特别是精细的触觉和危险预警的痛觉,已成为提升其自主性、安全性与交互能力的关键。然而,现有传感器技术往往难以同时、高灵敏地检测这两种截然不同的刺激,或需要极其复杂的结构设计。开发一种能集成触觉与痛觉感知的双功能传感器,是机器人领域亟待突破的挑战。论文以"Pollen-Biochar-Based Tactile-Pain Dual-Function Sensors for Intelligent Robotics"为题,发表于《Advanced Functional Materials》期刊。
研究思路
来自清华大学孙富春教授(第一通讯)中国科学院北京纳米能源与系统研究所蒲雄研究员的联合研究团队,受自然界启发,创新性地利用向日葵花粉,开发出一种高性能的触觉-痛觉双功能传感器。研究团队将花粉在惰性气氛下高温碳化,得到了一种具有独特"海胆状"微观结构的导电生物炭颗粒。随后,他们通过静电纺丝技术,将这些颗粒均匀嵌入高弹性的热塑性聚氨酯纳米纤维中,形成一层超薄的复合敏感膜,并以此为核心制备了柔性压阻传感器。
该传感器的奥秘在于其微观结构:在低压力(触觉范围)下,生物炭颗粒表面的尖刺仅形成有限接触,构建出较长的高电阻通路,电阻变化相对平缓;当压力超过一定阈值(如针刺或重压,痛觉范围)时,颗粒间发生更紧密、更大面积的接触,导致电阻急剧下降。这种差异化的响应机制,完美模拟了人类皮肤中低阈值触觉感受器和高阈值痛觉感受器的工作方式。
图片解析
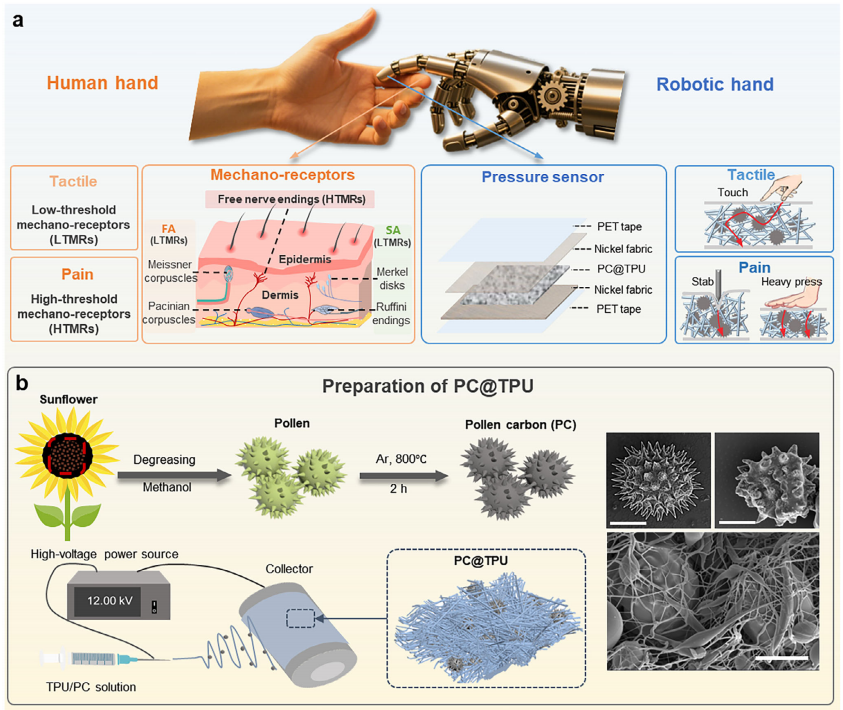
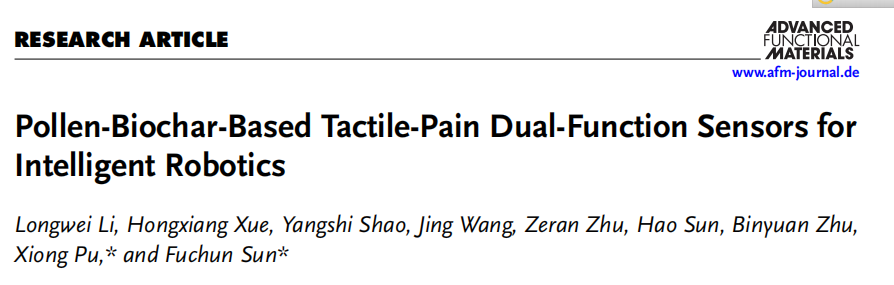
图1: 展示了人类手部触觉与痛觉的感知机制(左),以及仿生传感器从花粉到复合纳米纤维膜的制备过程(右),直观呈现了生物启发的研究思路。
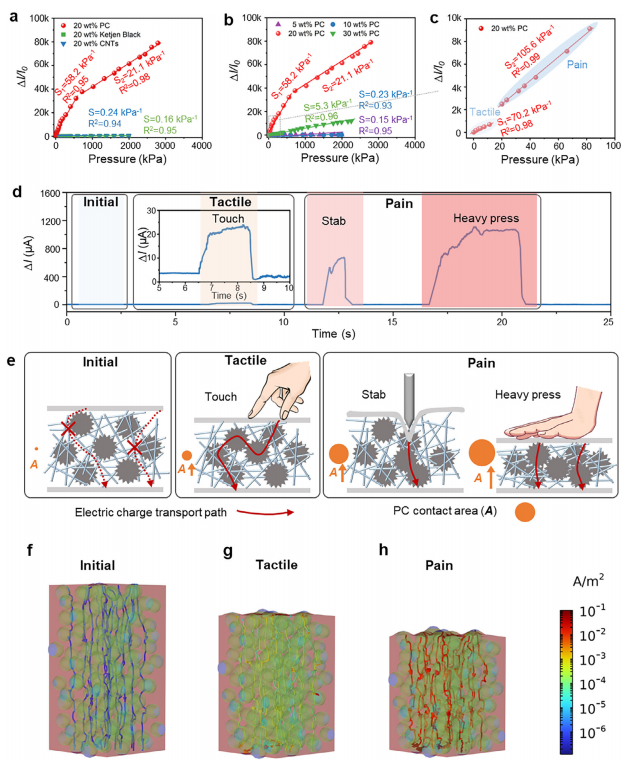
图2: 通过对比不同导电填料和不同花粉炭含量的传感器性能,证实了"海胆状"花粉炭结构在实现高灵敏度方面的独特优势,并揭示了其触觉-痛觉双响应的特性曲线。
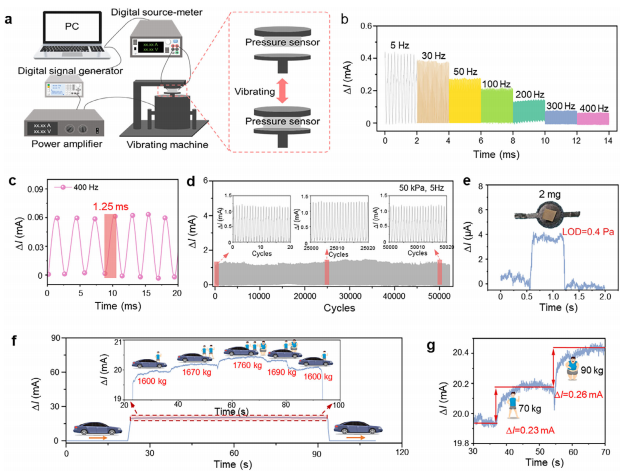
图3: 展现了传感器卓越的动态性能,包括宽频响应(5-400 Hz)、超快响应时间(约1.25毫秒)、极低的检测下限(0.4帕)以及惊人的耐久性(5万次循环后性能保持率>98%)。
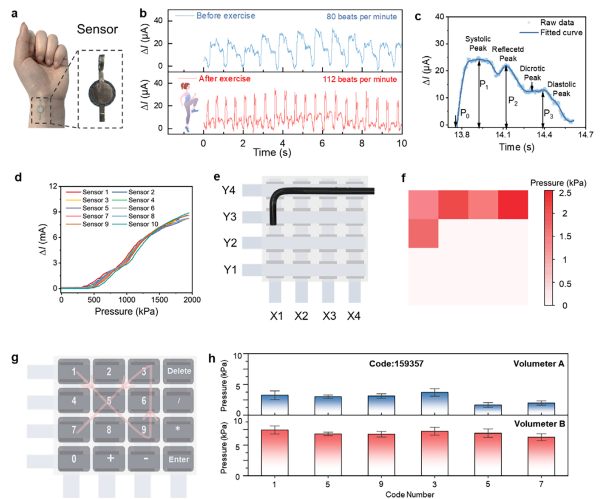
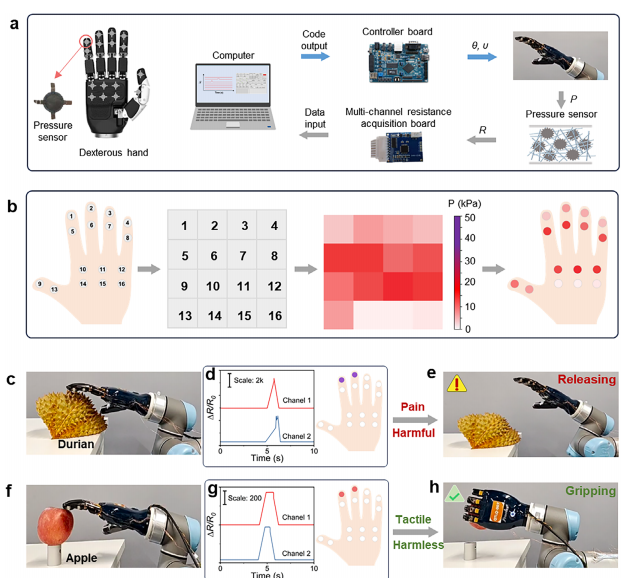
图4 & 5: 演示了传感器阵列的实际应用:从高保真地监测人体脉搏波形、识别物体形状轮廓,到集成于灵巧机器人手上,实时绘制压力分布图。
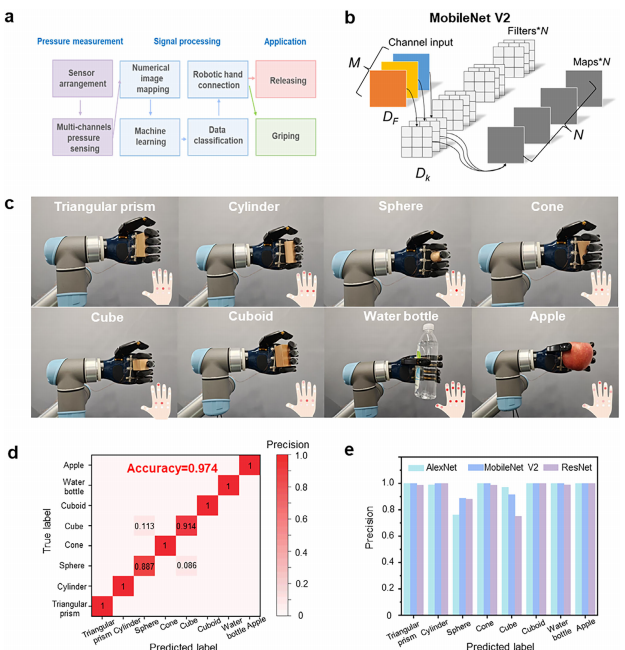
图6: 机器人手在搭载该传感器阵列并结合机器学习算法后,能够准确识别并抓取不同形状的物体,展示了其在智能抓取中的实用价值。
结论
本研究成功研制出一种基于花粉生物炭的仿生双功能传感器,它能够以高灵敏度、宽压力范围(0.4帕至3000千帕)同步区分触觉和痛觉刺激。该传感器结构相对简单,性能优异,为智能机器人提供了一种全新的、类皮肤的感知解决方案。将其集成于机器人灵巧手,结合机器学习,不仅实现了精准的物体形状识别,更赋予了机器人感知危险(如尖锐物)并立即做出自我保护反应的能力,显著提升了机器人操作的安全性、适应性和智能化水平。