1. 总体描述
总线是设备内部或近距离小范围的 "专用通信线",网络是多个独立设备远距离、大范围的 "互联通信系统",二者既相似又互补。从直观上来说,总线俗称BUS,本质上是传递数据或指令的通信链路,其名字也是从交通工具来的,显然除了链路,还暗含了数据承载能力,一般称为payload。广义上来说,指令也好,信号也好,都可以理解为是一种特殊的数据。
当提到车载网络的时候,由于特殊的应用场景,其网络又有一定特殊性。比如,一些所谓的网关应用中,并没有常见的以太网通信,只包含了一些lin,can相关的通信节点。车载网络的构建,主要考虑的是稳定性,实时性,电磁兼容和成本,带宽永远都是够用就好。随着车联网需求的日益旺盛,新的车载网路技术也不断涌出。
总的来说,常见的车载总线,如表1所示。
| 总线类型 | 典型速率 | 主要应用领域 | 关键特点 | 成本 | 物理 介质 | 拓扑 | 未来趋势 |
|---|---|---|---|---|---|---|---|
| CAN | 125kbps - 1Mbps (Classic), 5Mbps+ (FD) | 车身控制、动力总成、底盘、诊断 | 成本低、可靠、实时性(仲裁)、多主、广播、抗干扰 | 低 | 双绞线 | 总线型 | 基础控制领域长期存在 |
| LIN | < 20 kbps | 低成本车身电子、传感器/执行器 | 成本极低、单主多从、简单、低速 | 很低 | 单线 (+电源/地) | 总线型 | CAN子网,稳定应用 |
| FlexRay | 10 Mbps (每通道) | 高实时安全系统(X-by-Wire)、高性能底盘/动力、ADAS | 高带宽、确定性/实时性极强、双通道冗余、可靠 | 高 | 屏蔽双绞线 | 总线/星型/混合 | 被以太网挤压,特定高端应用 |
| MOST | 25/50/150 Mbps | 多媒体信息娱乐(音视频流) | 高带宽(多媒体)、同步传输优化、环形拓扑 | 中高 | 光纤/同轴/双绞线 | 环形 | 被车载以太网取代 |
| 车载以太网 | 100Mbps - 10Gbps+ | ADAS传感器、IVI、骨干网、网关、诊断刷新 | 超高带宽、可扩展(TCP/IP)、点对点交换、QoS(TSN)、未来架构核心 | 持续下降中 | 屏蔽双绞线 | 星型(交换) | 主流和未来方向 |
| LVDS (严格来是物理层技术) | 数百Mbps - 数Gbps | 高速点对点视频(摄像头->ECU, ECU->屏) | 超高带宽、低功耗、低噪声、点对点 | 中高 | 双绞线/同轴线 | 点对点 | 视频传输关键 |
2. CAN
CAN总线与采用CSMA/CD的半双工以太网(早期以太网)在核心的通道访问理念上确实非常相似,但它们解决"冲突"的方式有根本性的不同,这决定了它们不同的应用领域。它们都属于广播型网络 ,并且都使用载波侦听 和冲突检测机制来管理对共享总线的访问。但是,CAN的冲突处理机制要优雅和强大得多。CAN总线的Arbitration on Message Priority(AMP)机制,保证了较强的实时性。
| 特性 | CAN 总线 | 半双工以太网 (CSMA/CD) |
|---|---|---|
| 核心机制 | CSMA/CA + AMP | CSMA/CD |
| (载波侦听多路访问/冲突避免 + 仲裁) | (载波侦听多路访问/冲突检测) | |
| 如何"听" | 持续监听总线状态(显性/隐性) | 监听线路上是否有载波(信号) |
| 发生冲突时 | 基于标识符的位仲裁 | 基于时间的二进制指数退避 |
| 冲突结果 | 高优先级(低ID)帧无损继续发送 ,低优先级帧主动退出发送。没有时间浪费。 | 所有冲突帧都被破坏 ,发送终止。双方等待一段随机时间 后重试。产生时间延迟。 |
| 实时性 | 确定性。高优先级消息的传输延迟是可预测的。 | 非确定性。消息的传输延迟取决于网络负载和冲突情况,理论上可能无限次重试。 |
| 数据特性 | 短帧 (最多8字节),小开销 | 大帧 (最多1500字节),相对大开销 |
| 应用领域 | 汽车、工业控制、航空(对实时性和可靠性要求极高的领域) | 早期局域网(10BASE2, 10BASE-T)(已被全双工交换式以太网淘汰) |
2.1 CAN信号
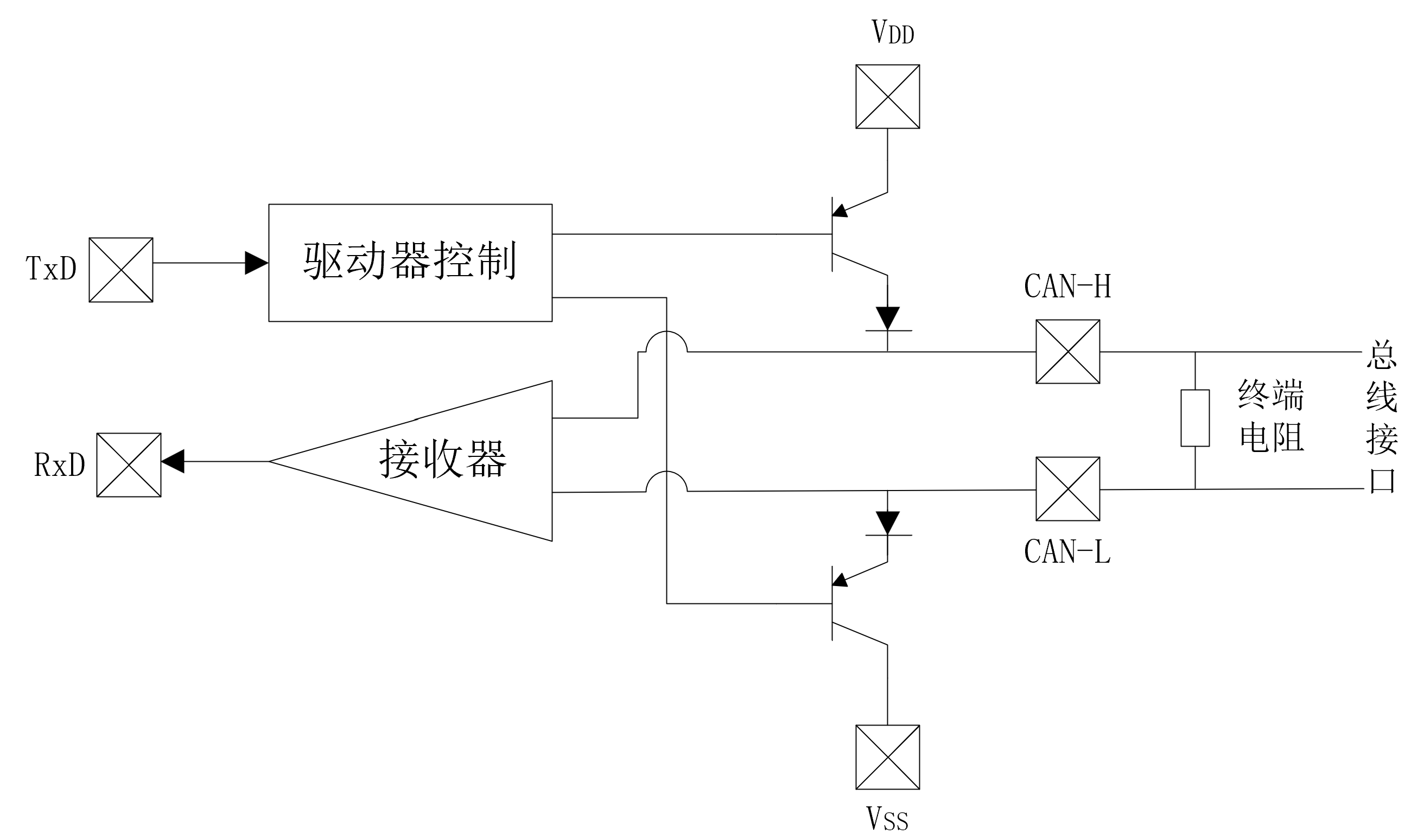
如图x所示,CAN收发器在信号转换过程中,系统在行为上不对称的。CAN有显性电平0和隐形电平1。前者是通过驱动器主动驱动 CAN-H被拉高到VDD,而CAN-L被拉低到VSS,即从隐性1到显性0的过程是主动的,即时的,速度也会比较苦快。另一方面,从显性0到隐性1的变化,则是整个网络的放电,这个过程中驱动器停止驱动,总线上的电容(来自导线和节点的寄生电容)通过终端电阻进行放电,使电平恢复到隐形状态。这个过程的时间取决于RC常数,从而可能会影响到总线信号的完整性和通信速率,也是终端电阻大小选型的理论依据。
CAN总线使用位仲裁 和位填充机制,这些都要求所有节点对"位"的边界有共同的理解。一个"位"被分成四个段:
① 同步段 (Sync-Seg)
② 传播时间段 (Propagation-Seg)
③ 相位缓冲段1 (Phase Buffer Seg1)
④ 相位缓冲段2 (Phase Buffer Seg2)
接收器会在位的末尾(Phase-Seg2结束前)对总线电平进行采样,以确定该位是显性(0)还是隐性(1),这是整个位时间内稳定性最高的时刻。
接收器需要在整个位时间内,有足够的时间来看到发送器发出的信号,并完成采样。这个"足够的时间"必须包含两个部分:
① 信号的物理传播时间:电信号在导线上以接近光速传播,但对于长距离网络,这个延迟不可忽略。
② 节点的处理延迟:信号经过收发器、节点内部电路的延迟。
如果接收器还没能正确采样当前位,发送器就已经开始发送下一位了,那么接收器就会采样错误,导致帧错误、CRC错误等,通信也就失败了。
在隐形电平阶段,为了正常工作,CAN接收器必须能够在下一位发送之前,感知通道上的1;但网络不可能完美地同步,网络上信号的传播需要时间。所以,如果网络太大,或者数据通信速率太快,就容易发生错误。
为了解决这个问题,CAN协议定义了一个关键参数:位时间 (Bit Time)。
-
位时间 (Bit Time) = 1 / 波特率 (Baud Rate)
- 例如:波特率为 500 kbit/s 时,位时间 = 1 / 500,000 = 2 µs(微秒)。
这个位时间必须大于信号在网络中往返一次所需的最大时间(即最远两个节点之间通信所需的时间)加上各种硬件延迟。
最大允许的网络传播延迟是设计网络时的一个硬性限制。它的计算公式可以简化为:
最大允许的电缆长度 ∝ (位时间 - 硬件延迟) / 信号传播速度
| 波特率 (Baud Rate) | 典型应用场景 | 最大推荐电缆长度 (约) |
|---|---|---|
| 1 Mbps | 高速车身网络、发动机控制、变速箱 (CAN-C) | 40 m |
| 500 kbps | 高速车身网络、通用工业控制 | 100 m |
| 250 kbps | 中速车身网络、舒适系统 (CAN-B) | 250 m |
| 125 kbps | 低速车身网络、诊断接口 (OBD-II) | 500 m |
| 50 kbps | 低速容错网络 (LIN主节点) | 1000 m |
| 10 kbps | 超长距离、高容错应用 | 5000 - 6000 m |
因此,可以得出以下结论,网络越大(越长),为了保证可靠通信,最大允许的通信速率就必须越低。:
(1) 如果网络太大(电缆太长)
-
传播延迟 (tPROP)会变大。 -
为了满足
位时间 > 传播延迟 + 硬件延迟,唯一的办法就是增加位时间。 -
而增加位时间意味着降低波特率(因为位时间 = 1 / 波特率)。
(2)如果数据通信速率太快(波特率太高)
-
位时间 (Bit Time)会变得非常短(例如1 Mbit/s时,位时间只有1µs)。 -
在这么短的时间内,信号可能还没来得及传播到最远的节点并返回,一位的发送就已经结束了。
-
接收器在采样点时看到的可能是错误的电平,从而导致通信错误。
-
结论:通信速率越快,允许的网络最大长度就越短。
2.2 CAN帧
由于上述信号传输的稳定性问题,仲裁期间的传输速率一般是500kbit/s,而不是标准的1Mbit/s(理论极限),这种网络的依赖性和局限性是CAN网络固有的,ECU的数量并不受此局限,而是受到驱动器的输出的限制。
一个CAN数据帧由多个字段 (Fields) 组成。根据标识符 (ID) 长度的不同,分为两种格式:
(1)标准帧 (Standard Frame):使用11位标识符。
(2)扩展帧 (Extended Frame):使用29位标识符。
| 字段 Field | 长度 Length | 说明 Description |
|---|---|---|
| 帧起始 (SOF) | 1 bit | Start Of Frame。一个显性位 (Dominant, 0),用于同步所有节点,标志着帧的开始。 |
| 仲裁场 (Arbitration Field) | 决定报文优先级和类型 | |
| 标识符 (ID) | 11/29 bits | 标准帧为11位,扩展帧为29位。ID值越小,优先级越高。这是CAN总线仲裁的依据。 |
| RTR | 1 bit | Remote Transmission Request 。显性位 (0) 表示这是数据帧 ,请求发送数据;隐性位 (1) 表示这是远程帧,请求其他节点发送相应ID的数据。 |
| IDE | 1 bit | Identifier Extension。标准帧中为显性位 (0),扩展帧中为隐性位 (1)。 |
| SRR | 1 bit | Substitute Remote Request 。仅存在于扩展帧中,位于替代标准帧的RTR位位置。必须为隐性位 (1)。 |
| 控制场 (Control Field) | 提供关于数据长度的信息 | |
| IDE, r0 | 2 bits | 对于标准帧,这包含IDE位和一个保留位 (r0)。 |
| DLC | 4 bits | Data Length Code 。表示数据场中包含的数据字节数 (0-8字节)。DLC > 8 的值在CAN FD中另有用途,在经典CAN中仍视为8字节。 |
| 数据场 (Data Field) | 0-64 bits (0-8 Bytes) | 实际要传输的数据。长度由DLC字段指定。可以为0字节。 |
| CRC场 (CRC Field) | 用于错误检测的循环冗余校验码 | |
| CRC序列 | 15 bits | 根据帧之前的所有位计算得出的校验和。 |
| CRC分隔符 | 1 bit | 必须为隐性位 (1)。用于分隔CRC序列和后面的ACK场。 |
| ACK场 (ACK Field) | 用于确认接收 | |
| ACK Slot | 1 bit | 发送器在此发出隐性位 (1) 。任何正确接收到帧 的接收器(无论是否为目标节点)都会在此位覆盖一个显性位 (0) 作为应答。 |
| ACK分隔符 | 1 bit | 必须为隐性位 (1)。由发送器发出。 |
| 帧结束 (EOF) | 7 bits | End Of Frame 。由7个连续的隐性位 (1) 组成。标志着帧的结束。 |
| ITM (Intermission) | 3 bits | 帧间间隔 。不是帧的一部分,是连续两帧之间的最小间隔,由3个隐性位组成。在此期间,任何节点都不能开始发送帧,以便总线恢复隐性状态。 |
| [CAN帧] |
| 特性 | Classical CAN (经典CAN) | CAN FD (灵活数据速率CAN) | 区别带来的影响 |
|---|---|---|---|
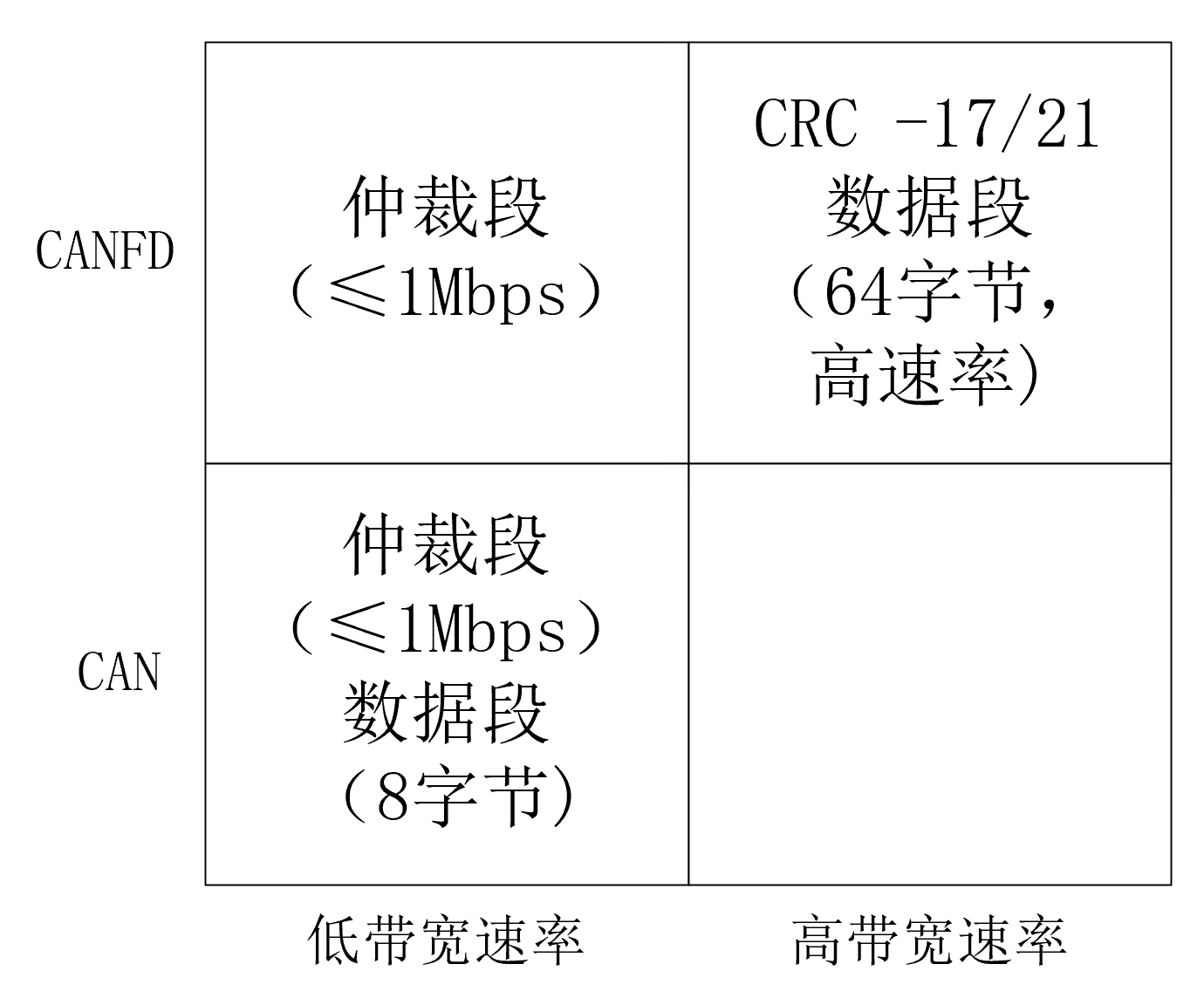
| 最高速率 | 1 Mbps (仲裁段和数据段速率相同) | 仲裁段:≤ 1 Mbps 数据段:最高 5 Mbps (甚至8+ Mbps) | 核心区别1:双速率。CAN FD在数据传输阶段可以切换至更高的速率,大幅提升有效带宽。 |
| 数据场长度 | 最大8字节 | 最大64字节 | 核心区别2:更长的数据帧。单帧可传输更多数据,减少了协议开销(如帧头、CRC、ACK等),效率更高。 |
| CRC (校验场) | 15位CRC | 17位或21位CRC | 安全性增强。更长的数据帧需要更强大的错误检测能力。CRC多项式也更复杂,CRC计算包含保护位(Stuff-bit Count),能检测填充错误。 |
| 帧格式 | 标准帧(11位ID)或扩展帧(29位ID) | 新增了CAN FD帧格式 | 后向兼容性。CAN FD控制器可以识别经典CAN帧,但经典CAN控制器无法处理CAN FD帧(会报错)。FD帧用保留位标识自己。 |
| 控制场 | 包含DLC(4位)和r0、r1保留位 | 重新定义了控制场 : - EDL (Extended Data Length): 隐性位表示FD帧 - BRS (Bit Rate Switch): 显性位表示切换速率 - ESI (Error State Indicator): 指示发送节点的错误状态 - DLC (Data Length Code): 可表示0-64字节 | 功能扩展。BRS位是实现速率切换的开关。ESI位提供了更好的网络诊断能力。 |
| 位填充 | 每5个相同位后填充1个反相位 | 仲裁段 :规则同经典CAN 数据段 :每4个相同位后填充1个反相位 | 为高速率优化。数据段更密集的填充保证了在高波特率下仍有足够的边沿用于同步,但这也导致了CRC增长的必要性。 |
| 兼容性 | - | 不完全向后兼容 | 关键限制。CAN FD节点可以与经典CAN节点共存于同一总线,但必须配置为以经典CAN模式(即≤1Mbps,数据段≤8字节)通信。否则经典CAN节点会报错。 |
| [CAN FD vs. Classical CAN 核心区别对比] |
3. LIN
典型应用场景 包括车门模块(车窗、后视镜)、座椅控制器、雨量传感器等低带宽、低成本子系统,其中每个从节点BOM成本可控制在1美元以下。
3.1 LIN与UART
通常来说,MCU只需通用UART外设 + 廉价LIN收发器芯片即可接入LIN总线,无需复杂协议硬件(如CAN控制器),大幅降低成本。
核心逻辑:硬件复用 + 协议简化
-
UART硬件基础:
-
LIN的物理层本质是基于异步串行通信(UART) 的变体,使用单线传输(+12V电池电压和地线)。
-
微控制器(MCU)的UART模块可直接输出TTL/CMOS电平的串行数据,但需通过LIN收发器转换为符合LIN标准的信号(单线、高电压容错)。
-
-
收发器的作用:
-
电平转换 :将MCU的UART信号(如3.3V/5V)转换为LIN总线的12V电池电压电平。
-
总线保护 :提供ESD防护、短路保护,并支持休眠/唤醒功能。
-
硬件成本低:LIN收发器芯片价格通常低于1元人民币,远低于CAN收发器。
-
-
协议由软件实现:
-
LIN的帧结构(同步间隔、标识符、数据、校验) 可通过MCU的UART+定时器由软件模拟(无需专用硬件控制器)。
-
例如:主节点发送同步间隔(Break)时,UART发送
0x00并故意制造一个超长低电平(大于13个比特位时间)。
-
3.2 主从节点同步机制
从节点通过解析主节点的同步字段实时校准波特率,无需高精度时钟,降低硬件成本。
核心逻辑:波特率自适应 + 同步机制
-
无独立时钟源需求:
- LIN从节点通常使用低成本RC振荡器(精度仅±15%),无法满足通信时序要求。
-
同步机制流程:
-
同步间隔(Sync Break) :
主节点发送一个13比特以上的低电平(标志帧开始)。
-
同步字段(Sync Field) :
主节点紧接发送一个固定字节
0x55(二进制01010101)。 -
从节点波特率校准:
-
从节点测量
0x55的上升沿/下降沿时间(已知其为标准UART字节)。 -
通过测量
0x55的位时间(如T1~T8),动态计算主节点波特率(例如:波特率 = 1 / (T1+T2+...+T8)/8)。 -
从节点据此调整自身UART波特率,实现与主节点同步。
-
-
| 特性 | 技术实现 | 成本优化效果 |
|---|---|---|
| UART接口即可 | 复用MCU已有UART + 软件协议栈 | 免专用硬件控制器 |
| 从节点独立同步 | 同步字段动态校准波特率 | 免高精度晶振(用RC振荡器即可) |
| 总线直接供电 | 收发器内部集成LDO稳压器 | 免外部稳压芯片 |
通过以上设计,LIN总线在满足汽车电子基础通信需求的同时,完美实现了极致的成本控制,成为CAN总线的补充性解决方案。
3.3 供电特点
从节点通过LIN收发器直接从总线获取电力,无需外接稳压器,简化电源设计并节省成本。
核心逻辑:总线供电 + 收发器内部稳压
-
直接连接电池电压:
-
LIN总线物理层设计为兼容汽车12V电池系统(工作电压:8--18V)。
-
总线信号"1"为电池电压(如12V),"0"为接地(0V)。
-
-
收发器内部集成稳压:
-
LIN收发器芯片内部集成电压调节器(LDO) ,将电池电压(12V)转换为稳定的3.3V/5V供从节点MCU使用。
-
例如:TI的TLIN1029收发器支持直接从LIN总线取电,输出3.3V/50mA供MCU工作。
-
-
供电模式:
-
正常模式:收发器从总线取电,内部LDO为MCU供电。
-
休眠模式:收发器关闭LDO,MCU断电,仅保留低功耗唤醒电路(电流<10μA)。
-
4. FlexRay
5. Ethernet
5.1 车载以太网线缆
| 线缆类型 | 优势 | 劣势 | 适用场景 |
|---|---|---|---|
| 非屏蔽双绞线UTP) | 成本低、重量轻、布线灵活 | 依赖差分信号和布局设计抗干扰 | 大多数车载网络(传感器、ECU) |
| 屏蔽双绞线(STP) | 抗干扰能力强 | 成本高、重量大、连接器复杂 | 高干扰环境(如电机附近) |
| 光纤 | 抗干扰极强、带宽高、无电磁辐射 | 成本极高、安装复杂、易受物理损伤 | 长距离高速链路(如摄像头到域控) |
车载以太网强调使用非屏蔽双绞线(UTP)的主要原因可以归结为以下几个方面:
5.1.1. 成本效益
-
制造成本低 :
非屏蔽双绞线省去了屏蔽层(如金属箔或编织网),材料和生产工艺更简单,显著降低了线缆成本。在汽车大规模生产中,这一成本节省尤为重要。
-
维护成本低 :
UTP的连接器(如RJ45)标准化程度高,安装和维护更便捷,减少了布线系统的复杂性。
5.1.2. 重量与空间优化
-
轻量化 :
UTP线缆比屏蔽双绞线(STP)更轻,有助于减轻整车重量,提升燃油效率或电动汽车的续航里程。
-
布线灵活性 :
UTP线径更细,适合在车内狭小空间内布线,尤其在电子设备密集的现代汽车中(如ADAS传感器、信息娱乐系统)。
3. 抗干扰设计的有效性
-
双绞抵消干扰 :
双绞线的两根导线以螺旋方式缠绕,使得外部电磁干扰(EMI)对两条导线的影响趋于相同。在差分信号传输中,干扰信号会被抵消,从而保证数据完整性。
-
差分信号技术 :
车载以太网(如100BASE-T1、1000BASE-T1)采用差分信号传输,利用两根导线的电压差传递信息,天然抑制共模噪声。
-
车载环境可控性 :
汽车内部的电磁干扰源(如电机、点火系统)通常经过严格设计,且线束布局可优化以减少干扰路径。此外,车载以太网的工作频率(如66 MHz以下)相对较低,受高频干扰影响较小。
4. 标准化支持与性能验证
-
专用车载以太网标准 :
例如 100BASE-T1(IEEE 802.3bw) 和 1000BASE-T1(IEEE 802.3bp),这些标准专为UTP设计,通过先进编码(如PAM3)和均衡技术,确保在非屏蔽线缆上的可靠传输。
-
严苛环境测试 :
车载以太网UTP需满足汽车级标准(如AEC-Q100),通过高温、振动、湿度等极端环境测试,确保耐用性。
5.2 车载以太网物理接口
5.2.1介质独立接口
| 接口 | 支持速率 | 自适应速率支持 | 典型应用场景 |
|---|---|---|---|
| MII | 10/100 Mbps | 是(需PHY自协商) | 传统车载网络、低速通信 |
| RMII | 10/100 Mbps | 是(需PHY自协商) | 低引脚数嵌入式系统 |
| RGMII | 10/100/1000 Mbps | 是(PHY自协商 + 接口速率自适应) | 千兆车载以太网、ADAS传感器 |
| GMII | 1000 Mbps | 否(固定千兆速率) | 早期千兆设备(逐渐被RGMII取代) |
| SGMII | 10/100/1000 Mbps | 是(PHY自协商 + 串行速率自适应) | 高速长距离传输、中央网关 |
5.2.2 MDIO
MDIO(Management Data Input/Output)接口协议是标准协议 ,由 IEEE 802.3以太网标准 定义,其标准化背景如下:
-
协议版本:
-
Clause 22:最初定义于IEEE 802.3标准,支持基本PHY管理功能(如速率配置、链路状态读取)。
-
Clause 45:扩展协议,定义于IEEE 802.3ae(万兆以太网标准),支持更多寄存器和高级功能。
-
-
标准特性:
-
物理层接口:MDIO由两根信号线组成:
-
MDC(Management Data Clock):时钟信号,由MAC控制器生成。
-
MDIO(Management Data I/O):双向数据线。
-
-
寄存器地址空间:
-
Clause 22:5位地址,支持32个寄存器(如
MII_BMCR、MII_BMSR)。 -
Clause 45:扩展为16位地址,支持更多设备类型(MMD)和寄存器。
-
-
-
厂商扩展:
-
标准兼容性:所有PHY厂商(如Marvell、Broadcom)必须支持Clause 22/45定义的基础寄存器。
-
私有扩展:厂商可通过预留寄存器地址(如0x10-0x1F)实现自定义功能(如温度监测、电缆诊断),但需在文档中明确说明。
-
5.2.3 VLAN
VLAN(Virtual Local Area Network,虚拟局域网) 是一种将物理局域网划分为多个逻辑子网的技术。它允许不同物理位置的设备加入同一逻辑网络,或同一物理设备隔离到不同逻辑网络。
-
核心思想 :
通过标签(Tag) 在数据链路层(Layer 2)实现逻辑隔离,无需依赖物理布线。
-
类比理解 :
如同一栋办公楼内,不同部门(财务、研发)使用独立的电话分机系统(逻辑隔离),但共享同一物理线路。
| 作用 | 说明 | 应用场景 |
|---|---|---|
| 广播域隔离 | 限制广播流量范围,减少网络拥塞 | 大型企业网络、数据中心 |
| 安全隔离 | 阻止未授权设备访问敏感子网(如财务VLAN) | 企业内网、工业控制系统 |
| 灵活组网 | 跨物理位置构建逻辑网络(如上海与北京的研发部同属VLAN 10) | 跨国企业、分布式办公 |
| 流量优先级管理 | 基于VLAN标签的优先级字段(PCP)实现QoS | 音视频传输(如车载娱乐系统) |
| 简化网络管理 | 通过软件配置替代物理布线调整 | 频繁变动的网络环境 |
VLAN在车载以太网中的应用
场景:智能汽车网络
| VLAN ID | 子系统 | 流量类型 | 优先级(PCP) |
|---|---|---|---|
| 100 | ADAS | 摄像头/雷达实时数据 | 7(最高) |
| 200 | 信息娱乐 | 视频流媒体 | 4 |
| 300 | 车身控制 | 门锁/灯光信号 | 2 |
| 400 | 诊断系统 | OTA更新、故障码 | 1 |
优势
-
安全隔离:防止娱乐系统被入侵影响刹车控制(VLAN 100与300隔离)。
-
带宽保障:ADAS数据(PCP=7)优先传输,避免视频流媒体抢占带宽。
-
简化布线:所有子系统通过同一车载以太网传输,减少线束重量。
| 协议 | 功能描述 | 是否需要硬件支持 | 典型应用场景 |
|---|---|---|---|
| IEEE 802.1AS-Rev(gPTP) | 广义精确时间协议,实现全网纳秒级时钟同步。 | 是(硬件计时器) | 传感器数据同步、多域控制器协同 |
| IEEE 802.1Qbv(时间感知整形) | 通过时间门控机制预留固定传输窗口,保障关键流量在指定时间内发送。 | 是(硬件门控逻辑) | 周期性数据(如摄像头帧、控制指令) |
| IEEE 802.1Qbu(帧抢占) | 允许高优先级帧中断低优先级帧传输,减少延迟。 | 是(硬件中断逻辑) | 紧急制动信号、碰撞预警 |
| IEEE 802.1Qav(CBS) | 基于信用的整形器,通过信用值动态调整流量优先级,确保高优先级数据及时传输。 | 是(硬件信用计算模块) | 混合流量环境(如ADAS与娱乐系统共存) |
| IEEE 802.1Qci(流过滤与监管) | 基于流特征(MAC地址、VLAN标签)过滤流量,并监管带宽使用。 | 部分(硬件加速过滤规则匹配) | 网络安全防护、带宽分配优化 |
| IEEE 802.1Qch(周期性排队与转发) | 通过周期性队列调度实现确定性延迟。 | 是(硬件队列管理) | 激光雷达点云数据、周期性传感器流 |
| IEEE 802.1Qcr(异步传输整形) | 动态调整突发流量的优先级和带宽,优化传输效率。 | 是(硬件令牌桶加速) | 突发控制指令、动态路径规划数据 |
| IEEE 802.1Qcc(流预留增强) | 集中式流管理,动态分配带宽和时间窗口。 | 部分(依赖软件控制器) | 多设备协同、全局资源调度 |
| IEEE 802.1CB(无缝冗余) | 数据帧冗余传输与去重,提升网络可靠性。 | 是(硬件冗余引擎) | 安全关键系统(如刹车、转向) |
(1) TSN的时间窗口
-
核心机制:
-
将时间划分为固定周期(如1ms),每个周期内为不同流量分配专属传输窗口。
-
示例:在车载网络中,前500μs传输摄像头数据,后500μs传输诊断信息。
-
-
硬件依赖:
- 需要支持时间同步(如gPTP)和硬件门控逻辑的芯片(如NXP S32G)。
(2) 优先级映射
-
字段到队列的转换:
-
将数据帧的VLAN PCP或IP DSCP字段映射到硬件队列(如队列0-7)。
-
示例:PCP 7 → 队列0(最高优先级),PCP 0 → 队列7(最低优先级)。
-